









写在前面:
Depthwise(DW)卷积与Pointwise(PW)卷积,合起来被称作Depthwise Separable Convolution
一、Depthwise 卷积
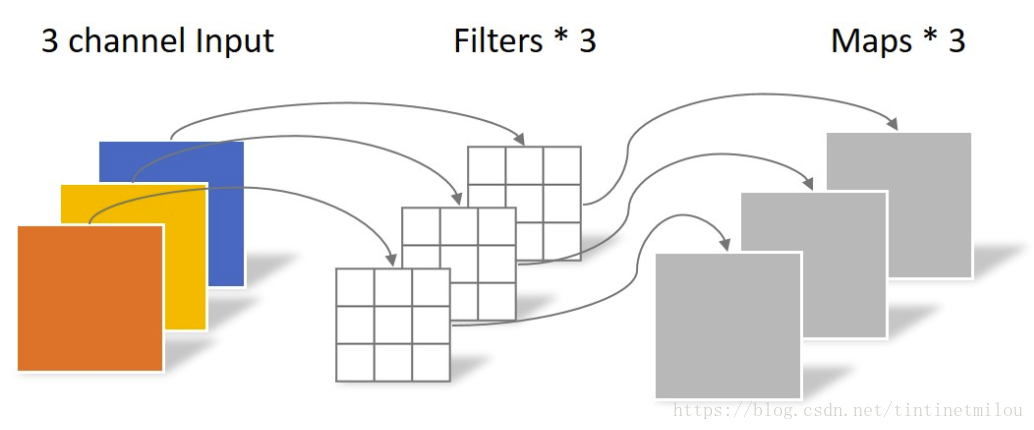
传统的卷积,比如(1, 3, 64, 64) 与 kernel_size = (3,3)的卷积核进行卷积,需要在三个通道上同时计算,计算量很大,但是depthwise卷积,则把卷积核分成3个,每一个卷积核分别与输入进行卷积计算,节省了大量时间。
缺点:
1.丢失了空间信息,使卷积计算变得独立,原本是结合三个通道上的信息进行卷积,现在使不同通道间变得独立
2.不能修改卷积的输出通道(在nn.Conv2d()中需要设置groups = in_channel)
二、Pointwise 卷积
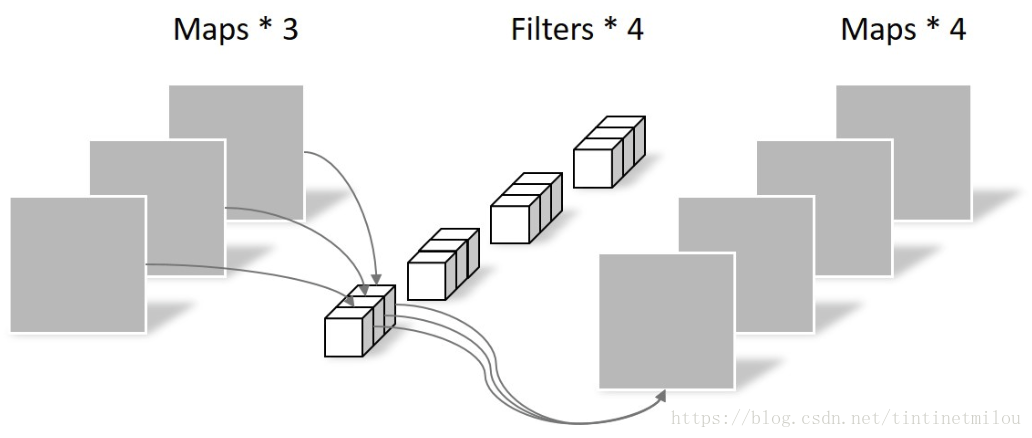
1.卷积核大小为 1*1*M ,M为输入的通道数,这里的卷积运算会将上一步的map在深度方向上进行加权组合,生成新的Feature map,输出通道数 = 使用的卷积核个数
2.可以修改输出的通道
数学依据如下:
设输入特征图尺寸:*
, 卷积核尺寸
*
,输入通道数 M,输出通道数 N
在传统的卷积运算中,需要运用乘法的次数:
在深度可分离卷积中,分为两个部分。
第一部分:每个通道进行同一个滤波器的深度卷积
第二部分:使用 1×1(点方向)卷积滤波器来获得深度卷积的输出并对其进行组合
减少的计算量:
代码如下:
from torch import nn
class separableconv(nn.Module):
def __init__(self, in_ch, out_ch, stride):
super(separableconv, self).__init__()
self.depth_conv = nn.Conv2d(
in_channels=in_ch,
out_channels=in_ch,
kernel_size=3,
stride=stride,
padding=1,
groups=in_ch
)
self.point_conv = nn.Conv2d(
in_channels=in_ch,
out_channels=out_ch,
kernel_size=1,
stride=1,
padding=0,
groups=1
)
def forward(self, input):
out = self.depth_conv(input)
out = self.point_conv(out)
return out
侵权删















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









