







电力拖动控制系统作业答案3
若要改变双闭环系统的转速,应该调节什么参数?为什么?若要改变电动机的堵转电流应调节系统中的什么参数?为什么?
如果双闭环调速系统的转速调节器不是PI调节器,而是改用P调节器,对系统的静、动态特性有什么影响?
在转速、电流双闭环系统中,转速调节器采用P调节器,系统会一直处于有静差的状态,转速调节器处于未饱和状态和处于主导地位的电流调节器形成一个电流随动系统,无法形成在最大电流下的恒流升速,使得在最短时间内速度上升最快,动态响应较慢。
双闭环调速系统中ASR、ACR均采用PI调节器,在带额定负载运行下,转速反馈线突然断线,当系统重新进入稳定运行时,电流调节器的输入偏差信号 Δ U i \varDelta U_i ΔUi是否为零?为什么?
Δ U i ≠ 0 \Delta \mathrm{U}_{\mathrm{i}}\ne 0 ΔUi=0,因为转速反馈线断开, Δ U n = U n ∗ \Delta \mathrm{U}_{\mathrm{n}}=\mathrm{U}_{\mathrm{n}}^{*} ΔUn=Un∗,ASR调节器很快进入并一直处于饱和状态,ASR输出限幅值 U i m ∗ = β I d m U_{im}^{*}=\beta I_{dm} Uim∗=βIdm,而额定负载未变,负载电流为 I d l ≠ I d m I_{dl}\ne I_{dm} Idl=Idm,则 Δ U i = U i m ∗ − U i = β I d m − β I d l ≠ 0 \varDelta U_i=U_{im}^{*}-U_i=\beta I_{dm}-\beta I_{dl}\ne 0 ΔUi=Uim∗−Ui=βIdm−βIdl=0。
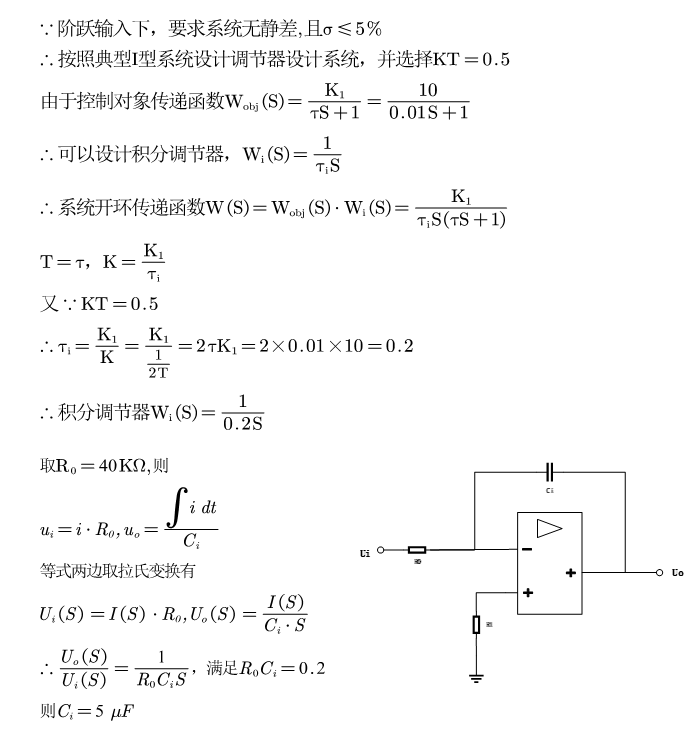
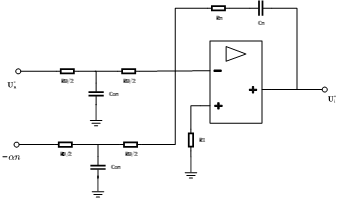
有一个系统,其控制对象的传递函数为 W o b j ( S ) = K 1 τ S + 1 = 10 0.01 S + 1 W_{obj}\left( S \right) =\frac{K_1}{\tau S+1}=\frac{10}{0.01S+1} Wobj(S)=τS+1K1=0.01S+110,要求设计一个无静差系统,在阶跃输入下,系统超调量$\sigma \leqslant 5%\left( 按线性系统考虑 \right) , 试 对 该 系 统 进 行 动 态 校 正 , 决 定 调 节 器 结 构 , 并 选 择 其 参 数 ( 画 出 调 节 器 电 路 图 , 调 节 器 输 入 电 阻 ,试对该系统进行动态校正,决定调节器结构,并选择其参数(画出调节器电路图,调节器输入电阻 ,试对该系统进行动态校正,决定调节器结构,并选择其参数(画出调节器电路图,调节器输入电阻R_0=40K\varOmega ,取K_IT=0.5时,\sigma =4.3%$)
在一个有三相零式晶闸管整流装置供电的转速、电流双闭环调速系统中,已知电动机的额定数据为
P
N
=
60
K
W
,
U
N
=
220
V
,
I
N
=
308
A
,
n
N
=
1000
r
/
min
,
P_N=60KW,U_N=220V,I_N=308A,n_N=1000 r/\min ,
PN=60KW,UN=220V,IN=308A,nN=1000r/min,电动势系数
C
e
=
0.196
V
⋅
m
i
n
/
r
C_e=0.196 V\cdot min/r
Ce=0.196V⋅min/r,主回路总电阻
R
=
0.18
Ω
R=0.18\varOmega
R=0.18Ω,触发整流环节的放大倍数
K
S
=
35
K_S=35
KS=35。电磁时间常数
T
l
=
0.012
s
T_l=0.012s
Tl=0.012s,机电时间常数
T
m
=
0.12
s
T_m=0.12s
Tm=0.12s,电流反馈滤波时间常数
T
o
i
=
0.0025
s
T_{oi}=0.0025s
Toi=0.0025s,转速反馈滤波时间常数
T
o
n
=
0.01
s
T_{on}=0.01s
Ton=0.01s,三相零式电路平均失控时间
T
S
=
0.0033
s
T_S=0.0033s
TS=0.0033s.额定转速时的给定电压
(
U
n
∗
)
N
=
10
V
\left( U_{n}^{*} \right) _N=10V
(Un∗)N=10V,调节器ASR、ACR饱和输出电压
U
i
m
∗
=
8
V
,
U
c
m
=
6.5
V
U_{im}^{*}=8V,U_{cm}=6.5V
Uim∗=8V,Ucm=6.5V。
系统的静、动态指标为:稳态无静差,调速范围D=10,电流超调量
σ
i
⩽
5
%
\sigma _i\leqslant 5\%
σi⩽5%,空载启动到额定转速时的转速超调量
σ
n
⩽
10
%
\sigma _n\leqslant 10\%
σn⩽10%。试求:
(1) 确定电流反馈系数
β
\beta
β(假设起动电流限制在339A以内)和转速反馈系数
α
\alpha
α
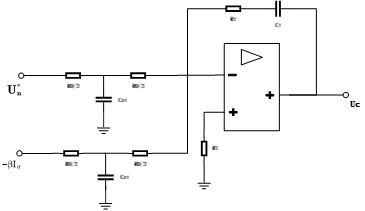
(2) 试设计电流调节器ACR,计算其参数 R i , C i , C o i R_i,C_i,C_{oi} Ri,Ci,Coi取 K I T ∑ i = 0.5 K_IT_{\sum{i}}=0.5 KIT∑i=0.5时, σ = 4.3 % \sigma =4.3\% σ=4.3%,校验近似条件,画出电路图,调节器输入回路电阻 R 0 = 40 K Ω R_0=40 K\varOmega R0=40KΩ
(3) 设计转速调节器ASR,计算其参数 R n , C n , C o n R_n,C_n,C_{on} Rn,Cn,Con, 取 h = 5 时, \text{取}h=5\text{时,} 取h=5时, Δ C max / C b = 81.2 % \varDelta C_{\max}/C_b=81.2\% ΔCmax/Cb=81.2%,校验近似条件和转速超调量 σ n \sigma _n σn是否能得到满足,画出其电路图,调节器输入回路电阻 R 0 = 40 K Ω R_0=40 K\varOmega R0=40KΩ
( 1 ) β = U i m ∗ I d m = 8 V 339 A = 0.0236 V / A α = ( U n ∗ ) N n N = 10 V 1000 r / m i n = 0.01 V ⋅ m i n / r \left( 1 \right) \,\,\beta =\frac{U_{im}^{*}}{I_{dm}}=\frac{8V}{339A}=0.0236 V/A \\ \,\, \alpha =\frac{\left( U_{n}^{*} \right) _N}{n_N}=\frac{10V}{1000 r/min}=0.01 V\cdot min/r (1)β=IdmUim∗=339A8V=0.0236V/Aα=nN(Un∗)N=1000r/min10V=0.01V⋅min/r
外链图片转存中…(img-wh4B4YqW-1630135966475)]




















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











