






MOSSE(Minimum Output Sum of Squared Error)
MOSSE是在Visual Object Tracking using Adaptive Correlation Filters这篇文章中提出来的,MOSSE的全称是Minimum Output Sum of Squared Error,令平方误差和最小来计算得到滤波器。
理论基础
先解释一下相关滤波
滤波
滤波是一个图像处理,尤其是图像增强的时候常用的方法(比如低通滤波器:把低频部分的信息保留,高频部分的信息滤掉)。很明显。滤波是频域里的一个概念,但考虑到MOSSE的相关性从空域角度比较好理解,因此暂时把频域滤波转换到空域滤波。通过卷积模板,可以实现从频域到空域的转换,所以再空域中,滤波基本上通过一个矩阵模板(窗)来实现。简单讲,就是把滤波看做领域操作算子,利用给定图像像素,周围像素的值,决定 此像素 最终的输出值。也就是说,输入图像和输出图像再像素上是一一对应的关系,滤波器只是一个操作算子。
相关
相关是信号处理领域的一个概念,用来描述两个信号的相似程度。
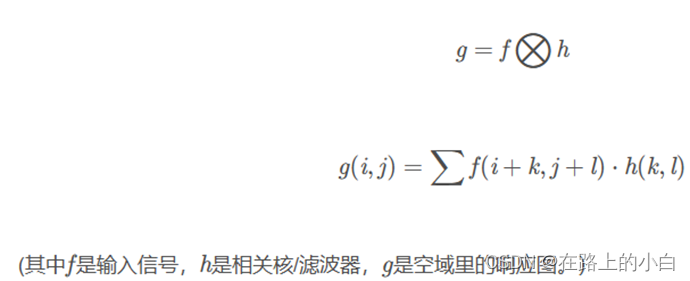
那么怎么计算响应呢?(看下图)
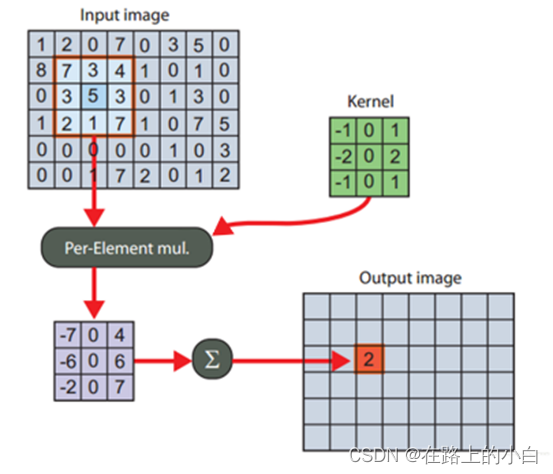
(1)滑动核,使其中心位于输入图像的f(i,j)像素上
(2)利用上式求和,得到输出图像的g(i,j)像素值
(3)充分上面操纵,直到求出输出图像的所有像素值
很明显,输入信号与响应之间再像素值上是一一对应的。输入信号的信息与核越相似,响应值就越高,因此,只要再下一帧里利用h找到响应值最高的位置就可以实现跟踪了。
算法步骤
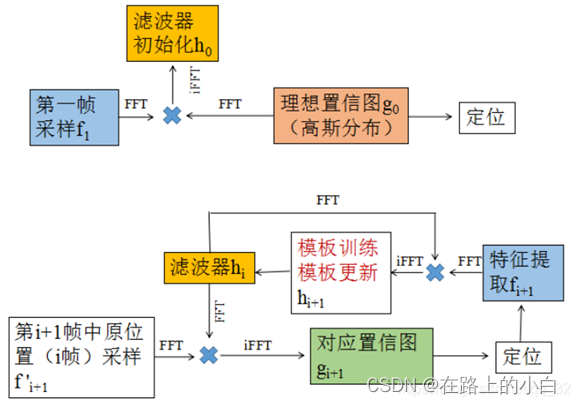
上半部分是滤波器初始化的过程,第一帧的特征提取和高斯分布的理想置信图(相应) gi+1已知,自然地,可以得到初始化的滤波器模板h,为了避免过拟合,对滤波器的初始化模板进行了一些处理。
下半部分是滤波器更新的过程,mosse算法的优越之处就在于滤波器模板能够利用定制的置信图g;进行训练并在线更新,减少了目标丢失的可能性。
次训练包含两次采样,第一次采样是在当前(+ 1)中定位上一() 标位置进行采样,通过滤波器得到响应,为了便于理解,我暂时把这个响应称为过渡响应,它的傅里叶变换即回归模型中的Gi.
利用过渡响应得到当前帧中响应最大的像素定位,对当前岐进行第二次采样,此时,目标位于采样框中心。采样结果的傅里叶变换即模型中的F。

详细步骤
候选框处理
第一步:读取原始图像,并给出初始目标框
第二步:对候选框进行灰度转换
第三步:对其进行对数变换,增强对比度
第四步:增加汉宁窗,降低边缘效应
第五步:进行快速傅里叶变换,提高计算速度

初始滤波器生成
第一步:以初始目标框中心为原点,以每个像素的坐标为变量,计算高斯分布并进行归一化
第二步:截取与目标框对应的区域作为理想相应图
第三步:对其进行FFT,按照滤波器更新步骤迭代XX次,以迭代结果作为初始滤波器

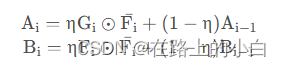
令

有















 3323
3323











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









