










此代码基于官方代码基础上进行改写,主要是获取zed相机深度画面中心点的深度值,为yolo测距打基础。
1. 导入相关库
import pyzed.sl as sl
import math
import numpy as np
import sys
import math
2. 相机初始化设置
zed = sl.Camera()
# 相机初始化设置
init_params = sl.InitParameters()
init_params.depth_mode = sl.DEPTH_MODE.ULTRA # 使用高质量模式
init_params.coordinate_units = sl.UNIT.MILLIMETER # 单位设置为毫米
3. 获取中心点深度数据
if zed.grab(runtime_parameters) == sl.ERROR_CODE.SUCCESS: # 相机成功获取图象
zed.retrieve_image(image, sl.VIEW.LEFT) # image:容器,sl.VIEW.LEFT:内容
zed.retrieve_measure(depth, sl.MEASURE.DEPTH) # 深度值
zed.retrieve_measure(point_cloud, sl.MEASURE.XYZRGBA) # 保留RGBA color的三维点云数据
img = image.get_data() # 转换成图像数组,便于后续的显示或者储存
dep_map = dep.get_data()
# 获取图像的像素坐标
x = round(image.get_width() / 2)
y = round(image.get_height() / 2)
err, point_cloud_value = point_cloud.get_value(x, y) # 将像素坐标转为三维坐标并存储
4. 计算中心点深度值
if math.isfinite(point_cloud_value[2]): # 判断坐标不为空和无限大
distance = math.sqrt(point_cloud_value[0] * point_cloud_value[0] +
point_cloud_value[1] * point_cloud_value[1] +
point_cloud_value[2] * point_cloud_value[2]) # 计算距离
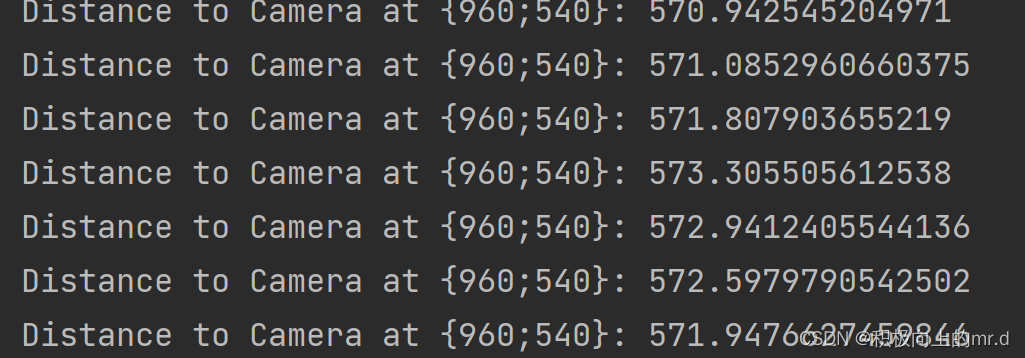
print(f"Distance to Camera at {{{x};{y}}}: {distance}")
5. 完整代码
import os
import cv2
import pyzed.sl as sl
import numpy as np
import math
def main():
# 创建相机对象
zed = sl.Camera()
# 相机初始化设置
init_params = sl.InitParameters()
init_params.camera_resolution = sl.RESOLUTION.HD1080 # Use HD1080 video mode
init_params.camera_fps = 30 # fps可选:15、30、60、100
# 打开相机
status = zed.open(init_params)
if status != sl.ERROR_CODE.SUCCESS: #Ensure the camera has opened succesfully
print("Camera Open : "+repr(status)+". Exit program.")
exit()
# Create and set RuntimeParameters after opening the camera
runtime_parameters = sl.RuntimeParameters()
image = sl.Mat() # 图像
depth = sl.Mat() # 深度值
dep = sl.Mat() # 深度图
point_cloud = sl.Mat() # 点云
i = 0
while True:
if zed.grab(runtime_parameters) == sl.ERROR_CODE.SUCCESS: # 相机成功获取图象
zed.retrieve_image(image, sl.VIEW.LEFT) # image:容器,sl.VIEW.LEFT:内容
zed.retrieve_measure(depth, sl.MEASURE.DEPTH) # 深度值
zed.retrieve_image(dep, sl.VIEW.DEPTH) # 深度图
zed.retrieve_measure(point_cloud, sl.MEASURE.XYZRGBA) # 保留RGBA color的三维点云数据
img = image.get_data() # 转换成图像数组,便于后续的显示或者储存
dep_map = dep.get_data()
# 获取图像的像素坐标
x = round(image.get_width() / 2)
y = round(image.get_height() / 2)
err, point_cloud_value = point_cloud.get_value(x, y) # 将像素坐标转为三维坐标并存储
distance = math.sqrt(point_cloud_value[0] * point_cloud_value[0] +
point_cloud_value[1] * point_cloud_value[1] +
point_cloud_value[2] * point_cloud_value[2]) # 计算距离
print(f"Distance to Camera at {{{x};{y}}}: {distance}")
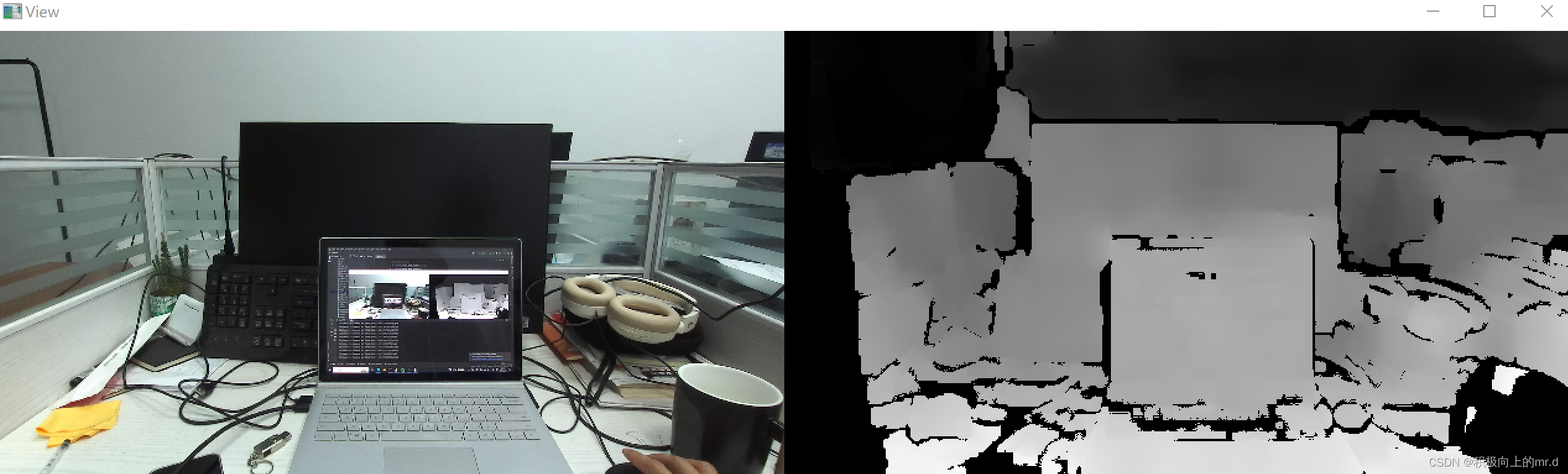
view = np.concatenate((cv2.resize(img,(640,360)),cv2.resize(dep_map,(640,360))),axis=1) # 原图和深度图拼接
cv2.imshow("View", view)
key = cv2.waitKey(1)
if key & 0xFF == 27: # esc退出
break
if key & 0xFF == ord('s'): # 图像保存
savePath = os.path.join("./images", "V{:0>3d}.png".format(i)) # 注意根目录是否存在"./images"文件夹
cv2.imwrite(savePath, view)
i = i + 1
# 关闭相机
zed.close()
if __name__ == "__main__":
main()
5. 实验效果
深度图和原图拼接
计算画面中心点深度值

















 162
162

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











