








文章目录
前言
AMG8833这款传感器是 8x8 红外热传感器阵列。 当连接到您的微控制器(或树莓派)时,它将通过 I2C 返回一组 64 个单独的红外温度读数。 它就像那些花哨的热像仪,但足够紧凑和简单,易于集成。
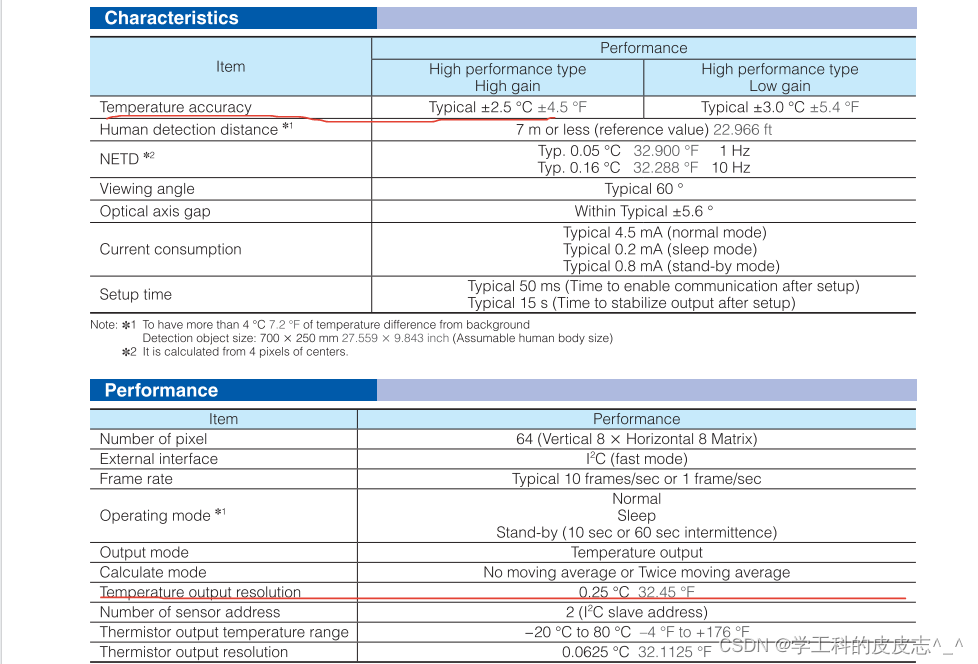
该部件将测量范围从 0°C 到 80°C(32°F 到 176°F)的温度,精度为 ± 2.5°C (4.5°F)。它可以在最远 7 米 (23) 英尺的距离内检测到人。最大帧速率为 10Hz,非常适合创建自己的人体探测器或迷你热像仪。
注意:他的分辨率是0.25°C,但是精度是==±2.5°C==,分辨率和精度大家要分清,对精度要求较高的场景要谨慎使用。
一、如何使用AMG8833
对于使用者来说我们只关心这个传感器能不能满足我们的要求,并不是很关心其内部如何实现,具体的寄存器和引脚这篇文章说的很清楚,大家感兴趣的可以了解。驱动代码也是用他的,主要是教大家如何使用这个传感器。
AMG8833的使用与stm32驱动代码

二、配置头文件.h,.c文件
硬件平台:STM32ZET6正点原子,AMG8833
软件平台:keil5
2.1.IIC头文件,C文件
因为这个传感器的通信方式是IIC,所以需要用IIC来驱动,所以需要配置时序,具体可以看芯片手册的时序图,从这个头文件我们可以得出什么,1.引脚的连接方式
传感器的SCL脚接单片机的PB6脚
SDA接单片机的PB7脚
AD0要拉低,即接到地
电源和地自然不用多说,接单片机的5V/3.3V,GND
同时我们可以看到宏定义了两个函数直接操作了GPIOB的CRL寄存器,是对他的输出模式进行定义
具体可以看这一篇
STM32的GPIO方向定义和方向寄存器的理解
每个单片机的这个不一样,具体看芯片手册
1.AMG_IIC.h
#ifndef __AMG_I2C_H
#define __AMG_I2C_H
#include "stdint.h"
#include "sys.h"
#include "delay.h"
#define AMG_SDA_RCC RCC_APB2Periph_GPIOB
#define AMG_SDA_PIN GPIO_Pin_7
#define AMG_SDA_IOx GPIOB
#define AMG_SCL_RCC RCC_APB2Periph_GPIOB
#define AMG_SCL_PIN GPIO_Pin_6
#define AMG_SCL_IOx GPIOB
#define AMG_SDA_IN() {GPIOB->CRL&=0x0FFFFFFF;GPIOB->CRL|=8<<28;}
#define AMG_SDA_OUT() {GPIOB->CRL&=0x0FFFFFFF;GPIOB->CRL|=3<<28;}
#define AMG_IIC_SCL PBout(6) //SCL
#define AMG_IIC_SDA PBout(7) //SDA
#define AMG_READ_SDA PBin(7) //输入SDA
#define AMG88xx_ADR 0xD0 //5脚拉低时的设备地址
//Status
#define STATUS_OK 0x00
#define STATUS_FAIL 0x01
void AMG8833_IIC_Init(void);
u8 AMG_IIC_Write_1Byte(u8 SlaveAddress, u8 REG_Address,u8 REG_data);
u8 AMG_IIC_Read_1Byte(u8 SlaveAddress, u8 REG_Address,u8 *REG_data);
uint8_t AMG_I2C_Read_nByte(uint8_t SlaveAddress, uint8_t REG_Address, uint8_t *buf, uint16_t len);
#endif
2.AMG_IIC.c
#include "AMG_IIC.h"
void AMG8833_IIC_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( AMG_SDA_RCC, ENABLE );
GPIO_InitStructure.GPIO_Pin = AMG_SDA_PIN; //端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //50Mhz速度
GPIO_Init(AMG_SDA_IOx, &GPIO_InitStructure);
RCC_APB2PeriphClockCmd( AMG_SCL_RCC, ENABLE );
GPIO_InitStructure.GPIO_Pin = AMG_SCL_PIN; //端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //50Mhz速度
GPIO_Init(AMG_SCL_IOx, &GPIO_InitStructure);
GPIO_SetBits(AMG_SDA_IOx,AMG_SDA_PIN);//SDA输出高
GPIO_SetBits(AMG_SCL_IOx,AMG_SCL_PIN);//SCL输出高
}
void AMG_IIC_Start(void)
{
AMG_SDA_OUT();//sda线输出
AMG_IIC_SDA=1;
AMG_IIC_SCL=1;
delay_us(4);
AMG_IIC_SDA=0;//START:when CLK is high,DATA change form high to low
delay_us(4);
AMG_IIC_SCL=0;//钳住I2C总线,准备发送或接收数据
}
//产生IIC停止信号
void AMG_IIC_Stop(void)
{
AMG_SDA_OUT();//sda线输出
AMG_IIC_SCL=0;
AMG_IIC_SDA=0;//STOP:when CLK is high DATA change form low to high
delay_us(4);
AMG_IIC_SCL=1;
AMG_IIC_SDA=1;//发送I2C总线结束信号
delay_us(4);
}
u8 AMG_IIC_Wait_Ack(void)
{
u8 ucErrTime=0;
AMG_SDA_IN(); //SDA设置为输入
AMG_IIC_SDA=1;delay_us(1);
AMG_IIC_SCL=1;delay_us(1);
while(AMG_READ_SDA)
{
ucErrTime++;
if(ucErrTime>250)
{
AMG_IIC_Stop();
return 1;
}
}
AMG_IIC_SCL=0;//时钟输出0
return 0;
}
//产生ACK应答
void AMG_IIC_Ack(void)
{
AMG_IIC_SCL=0;
AMG_SDA_OUT();
AMG_IIC_SDA=0;
delay_us(2);
AMG_IIC_SCL=1;
delay_us(2);
AMG_IIC_SCL=0;
}
//不产生ACK应答
void AMG_IIC_NAck(void)
{
AMG_IIC_SCL=0;
AMG_SDA_OUT();
AMG_IIC_SDA=1;
delay_us(2);
AMG_IIC_SCL=1;
delay_us(2);
AMG_IIC_SCL=0;
}
//IIC发送一个字节
//返回从机有无应答
//1,有应答
//0,无应答
void AMG_IIC_Send_Byte(u8 txd)
{
u8 t;
AMG_SDA_OUT();
AMG_IIC_SCL=0;//拉低时钟开始数据传输
for(t=0;t<8;t++)
{
if((txd&0x80)>>7)
AMG_IIC_SDA=1;
else
AMG_IIC_SDA=0;
txd<<=1;
delay_us(2);
AMG_IIC_SCL=1;
delay_us(2);
AMG_IIC_SCL=0;
delay_us(2);
}
}
//读1个字节,ack=1时,发送ACK,ack=0,发送nACK
u8 AMG_IIC_Read_Byte(void)
{
unsigned char i,receive=0;
AMG_SDA_IN(); //SDA设置为输入
AMG_IIC_SDA = 1;
delay_us(4);
for(i=0;i<8;i++ )
{
receive<<=1;
AMG_IIC_SCL=0;
delay_us(4);
AMG_IIC_SCL=1;
delay_us(4);
if(AMG_READ_SDA)
receive |= 0x01;
delay_us(4); //1
}
AMG_IIC_SCL = 0;
return receive;
}
//IIC写一个字节数据
u8 AMG_IIC_Write_1Byte(u8 SlaveAddress, u8 REG_Address,u8 REG_data)
{
AMG_IIC_Start();
AMG_IIC_Send_Byte(SlaveAddress);
if(AMG_IIC_Wait_Ack())
{
AMG_IIC_Stop();//释放总线
return 1;//没应答则退出
}
AMG_IIC_Send_Byte(REG_Address);
AMG_IIC_Wait_Ack();
delay_us(5);
AMG_IIC_Send_Byte(REG_data);
AMG_IIC_Wait_Ack();
AMG_IIC_Stop();
return 0;
}
//IIC读一个字节数据
u8 AMG_IIC_Read_1Byte(u8 SlaveAddress, u8 REG_Address,u8 *REG_data)
{
AMG_IIC_Start();
AMG_IIC_Send_Byte(SlaveAddress);//发写命令
if(AMG_IIC_Wait_Ack())
{
AMG_IIC_Stop();//释放总线
return 1;//没应答则退出
}
AMG_IIC_Send_Byte(REG_Address);
AMG_IIC_Wait_Ack();
delay_us(5);
AMG_IIC_Start();
AMG_IIC_Send_Byte(SlaveAddress|0x01);//发读命令
AMG_IIC_Wait_Ack();
*REG_data = AMG_IIC_Read_Byte();
AMG_IIC_Stop();
return 0;
}
//I2C读多个字节数据
uint8_t AMG_I2C_Read_nByte(uint8_t SlaveAddress, uint8_t REG_Address, uint8_t *buf, uint16_t len)
{
AMG_IIC_Start();
AMG_IIC_Send_Byte(SlaveAddress);//发写命令
if(AMG_IIC_Wait_Ack())
{
AMG_IIC_Stop();//释放总线
return 1;//没应答则退出
}
AMG_IIC_Send_Byte(REG_Address);
AMG_IIC_Wait_Ack();
delay_us(5);
AMG_IIC_Start();
AMG_IIC_Send_Byte(SlaveAddress|0x01);//发读命令
AMG_IIC_Wait_Ack();
while(len)
{
*buf = AMG_IIC_Read_Byte();
if(1 == len)
{
AMG_IIC_NAck();
}
else
{
AMG_IIC_Ack();
}
buf++;
len--;
}
AMG_IIC_Stop();
return STATUS_OK;
}
//I2C写多个字节数据
uint8_t AMG_I2C_Write_nByte(uint8_t SlaveAddress, uint8_t REG_Address, uint8_t *buf, uint16_t len)
{
AMG_IIC_Start();
AMG_IIC_Send_Byte(SlaveAddress);//发写命令
if(AMG_IIC_Wait_Ack())
{
AMG_IIC_Stop();//释放总线
return 1;//没应答则退出
}
AMG_IIC_Send_Byte(REG_Address);
AMG_IIC_Wait_Ack();
while(len--)
{
AMG_IIC_Send_Byte(*buf++);
AMG_IIC_Wait_Ack();
}
AMG_IIC_Stop();
return STATUS_OK;
}
这两个就分别保存为.h,.c文件仿真工程文件的HARDWARE的IIC下,没有就新建一个

2.2.AMG8833模块的驱动文件,.h,.c
驱动就是对他进行初始化,定义读数据函数,写数据写指令等
AMG8833.h
#ifndef __AMG8833_H
#define __AMG8833_H
#include "AMG_IIC.h"
#define AMG88xx_PIXEL_TEMP_CONVERSION 0.25
#define AMG88xx_THERMISTOR_CONVERSION 0.0625
enum
{
AMG88xx_PCTL = 0x00,
AMG88xx_RST = 0x01,
AMG88xx_FPSC = 0x02,
AMG88xx_INTC = 0x03,
AMG88xx_STAT = 0x04,
AMG88xx_SCLR = 0x05,
//0x06 reserved
AMG88xx_AVE = 0x07,
AMG88xx_INTHL = 0x08,
AMG88xx_INTHH = 0x09,
AMG88xx_INTLL = 0x0A,
AMG88xx_INTLH = 0x0B,
AMG88xx_IHYSL = 0x0C,
AMG88xx_IHYSH = 0x0D,
AMG88xx_TTHL = 0x0E,
AMG88xx_TTHH = 0x0F,
AMG88xx_INT_OFFSET = 0x010,
AMG88xx_PIXEL_OFFSET = 0x80
};
enum power_modes{
AMG88xx_NORMAL_MODE = 0x00,
AMG88xx_SLEEP_MODE = 0x01,
AMG88xx_STAND_BY_60 = 0x20,
AMG88xx_STAND_BY_10 = 0x21
};
enum sw_resets {
AMG88xx_FLAG_RESET = 0x30,
AMG88xx_INITIAL_RESET = 0x3F
};
enum frame_rates {
AMG88xx_FPS_10 = 0x00,
AMG88xx_FPS_1 = 0x01
};
enum int_enables{
AMG88xx_INT_DISABLED = 0x00,
AMG88xx_INT_ENABLED = 0x01
};
enum int_modes {
AMG88xx_DIFFERENCE = 0x00,
AMG88xx_ABSOLUTE_VALUE = 0x01
};
void AMG8833_Init(void);
float AMG88xx_ReadThermistor(void);
void amg88xx_readPixels(float *buf, uint8_t size);
#endif
AMG8833.c
#include "AMG8833.h"
void AMG8833_Init(void)
{
AMG8833_IIC_Init(); //IIC初始化
//enter normal mode
AMG_IIC_Write_1Byte(AMG88xx_ADR,AMG88xx_PCTL,AMG88xx_NORMAL_MODE);
//software reset
AMG_IIC_Write_1Byte(AMG88xx_ADR,AMG88xx_RST,AMG88xx_INITIAL_RESET);
//set to 10 FPS
AMG_IIC_Write_1Byte(AMG88xx_ADR,AMG88xx_FPSC,AMG88xx_FPS_10);
}
float signedMag12ToFloat(uint16_t val)
{
//take first 11 bits as absolute val
uint16_t absVal = (val & 0x7FF);
return (val & 0x800) ? 0 - (float)absVal : (float)absVal ;
}
float AMG88xx_ReadThermistor(void)
{
uint8_t raw[2];
uint16_t recast;
AMG_I2C_Read_nByte(AMG88xx_ADR,AMG88xx_TTHL, raw, 2);
recast = ((uint16_t)raw[1] << 8) | ((uint16_t)raw[0]);
return signedMag12ToFloat(recast) * AMG88xx_THERMISTOR_CONVERSION;
}
void amg88xx_readPixels(float *buf, uint8_t size)
{
uint16_t recast;
float converted;
uint8_t rawArray[128],i;
AMG_I2C_Read_nByte(AMG88xx_ADR,AMG88xx_PIXEL_OFFSET,rawArray,128);
for(i=0; i<size; i++)
{
uint8_t pos = i << 1;
recast = ((uint16_t)rawArray[pos + 1] << 8) | ((uint16_t)rawArray[pos]);
converted = signedMag12ToFloat(recast) * AMG88xx_PIXEL_TEMP_CONVERSION;
buf[i] = converted;
}
}
同样也是保存为.c,.h文件保存在这个文件夹下
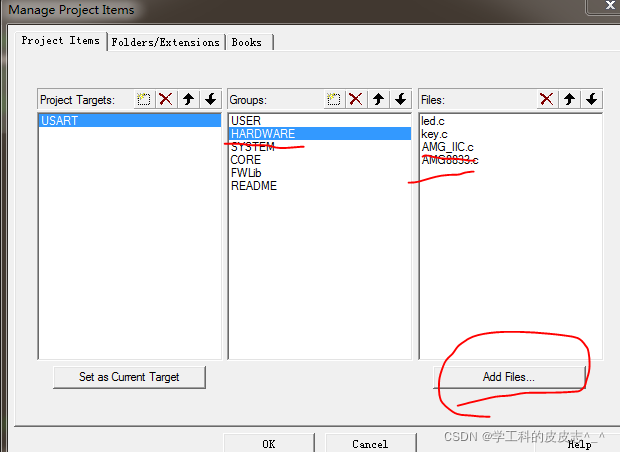
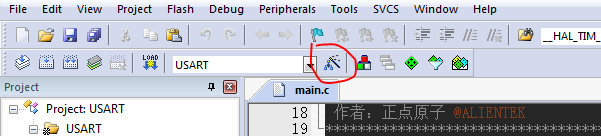
三、Keil相关配置
前面我们已经配置好了,需要在keil中进行文件添加和路径添加,点击我们这个快捷键
点击HARDWARE,把我们刚才的两个.c文件添加进来,注意添加.c就可以了,.h他会自动包含。
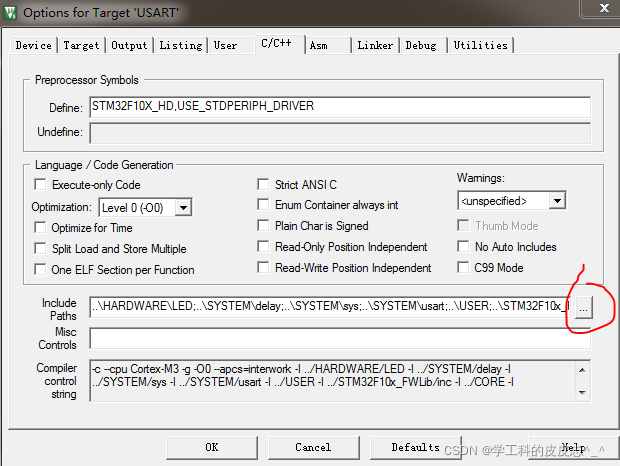
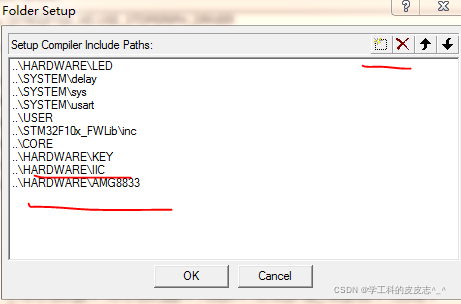
3.1.路径添加
点击我们的快捷键魔术棒,c/c++,添加路径,就是头文件的路径嘛,把他包含进来
四、主函数编写
主函数主要是对传感器和串口的初始化,就可以打印输出了,它将通过 I2C 返回一组 64 个单独的红外温度读数。
他比较适合用来做红外热成像,因为它本来就干这个的,不适合用来测人体温度,因为精度不够±2.5℃,想做红外热成像的可以看看这个up主,这里就不做展开了。
AMG8833红外热成像
#include "led.h"
#include "delay.h"
#include "key.h"
#include "sys.h"
#include "usart.h"
#include "math.h"
#include "stdio.h"
#include "string.h"
#include "stdlib.h"
#include "AMG8833.h"
/************************************************
ALIENTEK精英STM32开发板实验4
串口 实验
技术支持:www.openedv.com
淘宝店铺:http://eboard.taobao.com
关注微信公众平台微信号:"正点原子",免费获取STM32资料。
广州市星翼电子科技有限公司
作者:正点原子 @ALIENTEK
************************************************/
float pixels[64];
int a[64];
float Thermistor;
float temp_max=0;
float temp_wendu=0;
int main(void)
{
u8 i,j,k,t;
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
uart_init(115200); //串口初始化为115200
LED_Init(); //LED端口初始化
KEY_Init(); //初始化与按键连接的硬件接口
AMG8833_Init(); //AMG8833初始化
while(1)
{
amg88xx_readPixels(pixels, 64);
for(t=0;t<64;t++)
{printf("%d %f\r\n",t,pixels[t]);
delay_ms(10);
}
delay_ms(200);
}
}
4.1测试结果
总结及注意事项
1.他比较适合用来做红外热成像,因为它本来就干这个的,不适合用来测人体温度,因为精度不够±2.5℃,想做红外热成像的可以看看这个up主,这里就不做展开了。
AMG8833红外热成像
2.任何的红外测温传感器测出来的温度都是跟跟距离是有关的,相关的论文也说了,要建立温度距离补偿,用最小二乘法多项式拟合,通过数据拟合得到温度补偿公式进行温度补偿,说白了就是不同的距离补偿不同的值。


















 353
353

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











