






1、决策算法分类(一分为三)
1.1 导航规划算法:与机器人导航,手机导航算法基本一致,长度在几公里到几百公里不等,是规划模块中最成熟的算法。
特点:导航算法会给一个粗略的,大范围的路径,但是路径不会考虑如何避障,也不会考虑车辆动力学,一般规划的路径是不规则的折现。导航算法一般执行一次,只有遇到大范围拥堵、偏航、施工等情况才会再次执行
1.2行为规划算法(决策算法):决定车辆意图(遇到静态往左还是右,遇到动态加速还是减速),是规划里最难的。
特点:决策算法会给一个车辆的行驶意图,会指导车辆该避让,该超车,该左转该右转,但是决策不会给出具体的运动建议,例如:往左转多少度,车辆加速到多少。
实际环境瞬息万变,因此决策算法需要较高的执行频率,一般为10Hz,决策算法需要有一定的稳定性,不允许在周围环境稳定时出现“朝夕令改”的现象。
1.3运动规划算法:根据决策给出的行为意图在相关的时空中搜索出(或优化出)一条具有详细路径速度信息,并满足各个约束条件的轨迹,并将次轨迹发送给控制模块去跟踪,此轨迹长度一般在几米到几十米不等。
特点:运动轨迹生成的轨迹是决策规划模块的最终输出,具有详细的路径速度的信息,执行频率与决策相同,为10Hz,也需要有一定的稳定性。
2、数学基础
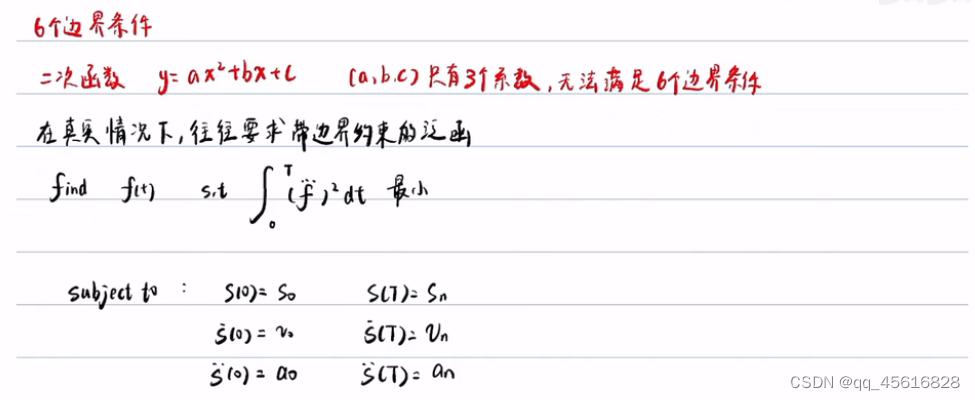
2.1 五次多项式
五次多项式是论文里的常数,单独较大,可只记结论
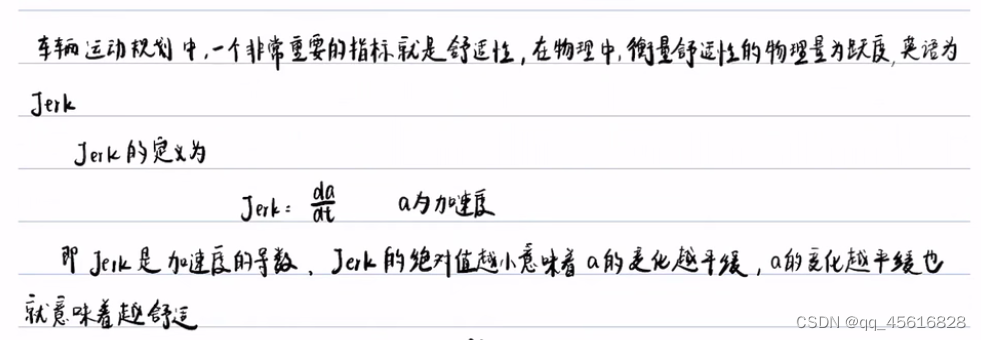

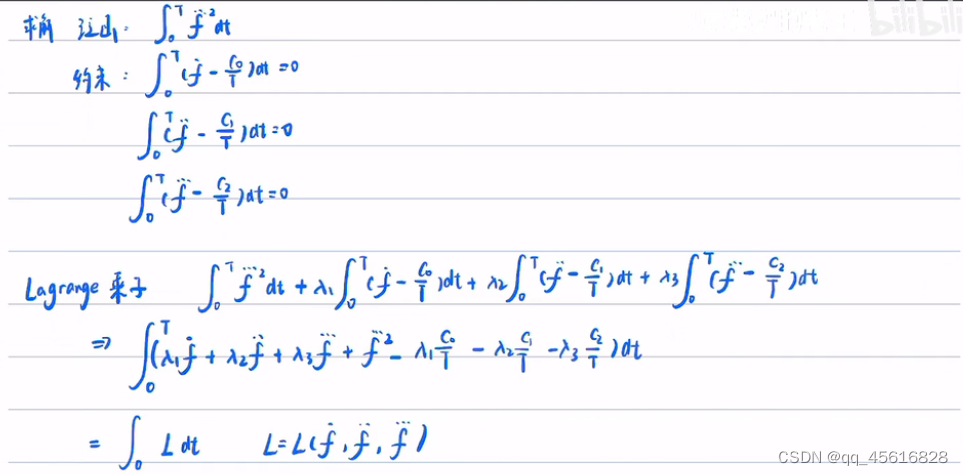
泛函可以稍微补一下









 2.2二次规划(主要是凸优化)
2.2二次规划(主要是凸优化)
掉包,算结果,不用关心过程,需要注意使用条件,优缺点,什么情况出问题。























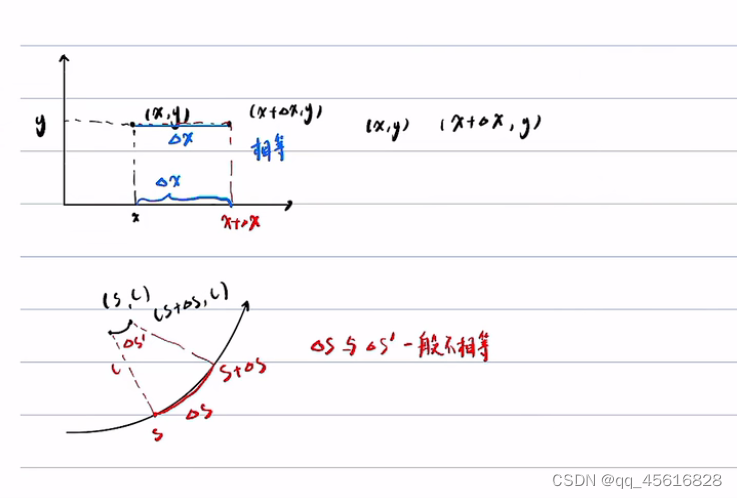
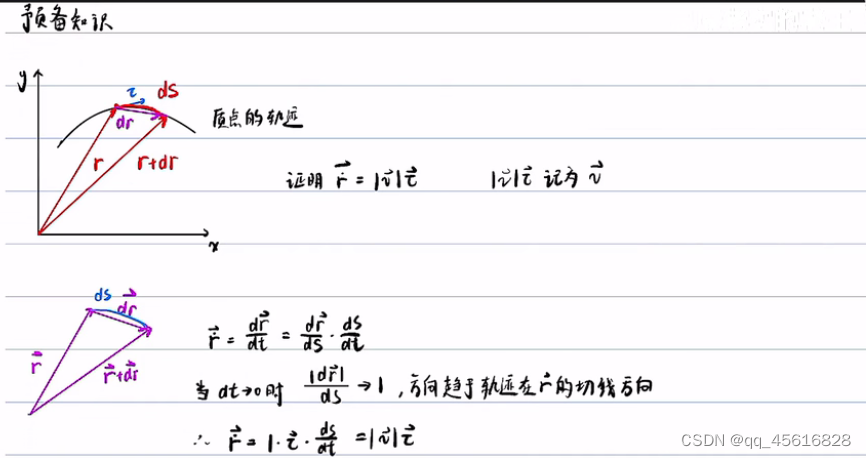
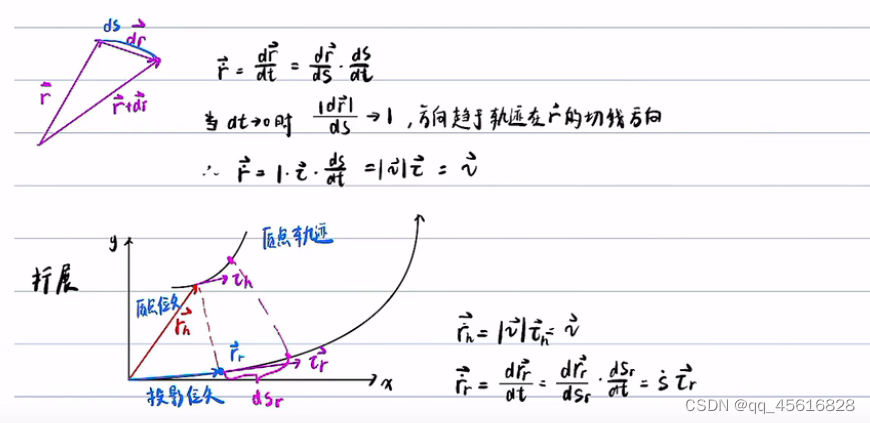
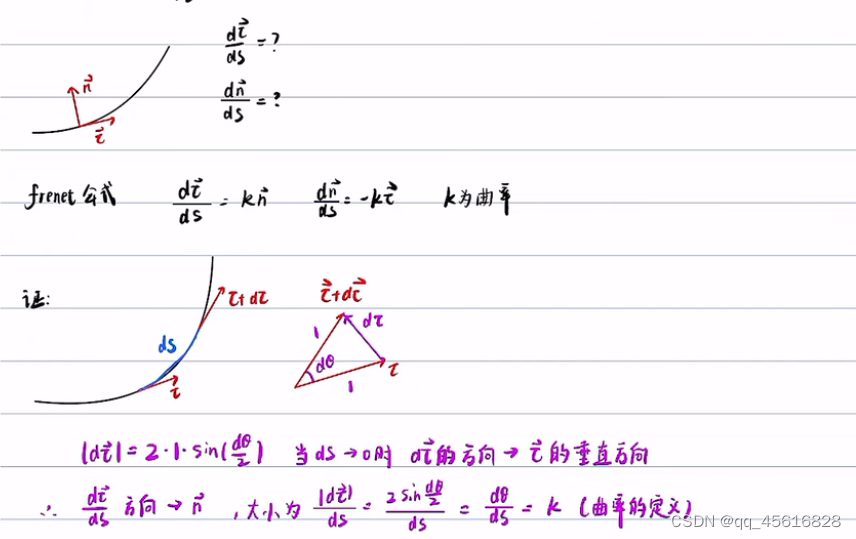
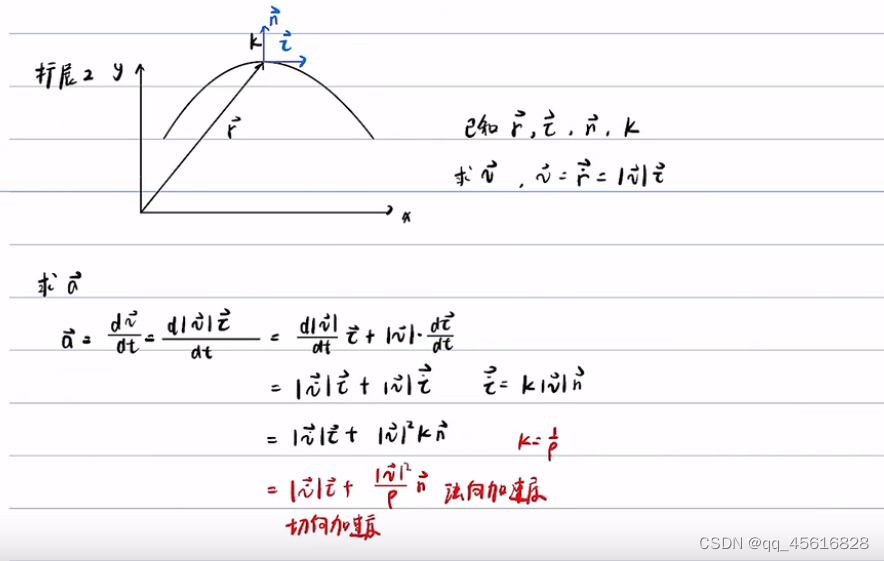
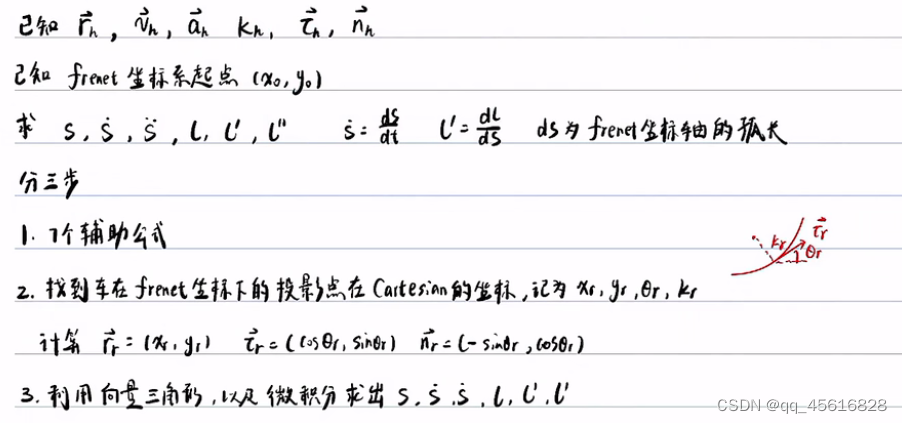
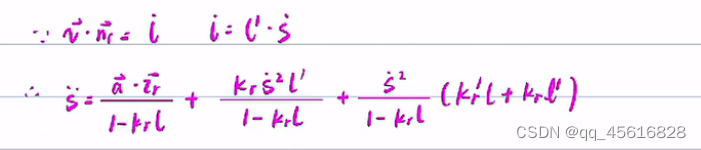
2.3frenet 坐标与Cartesian坐标转换(Cartesian 坐标系与Frenet坐标系的转换 - 简书)
会用,最好理解
高次的时候尽量不使用高斯不等式拟合,用分段的低次多项式拟合

Frenet坐标系与Cartesian坐标系互转_windSeS的博客-CSDN博客_frenet坐标系转换

一般用六个变量



















不推荐这样写



3















 3918
3918











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









