







继上次的推文:有限元计算过程中积分点应力如何外插至节点处?【公式推导篇】,本次分享单元积分点应力外插至节点处的数值实现过程。
应力外插
核心理念:坐标系的转换。
假设$\left( \xi ,\eta \right)
是母单元的自然坐标系,
是母单元的自然坐标系,
是母单元的自然坐标系,\left( \hat{\xi},\hat{\eta} \right) $是由高斯积分点控制的坐标系(术语可能不专业),假设高斯积分方案为
2
×
2
2 \times2
2×2。坐标系转换关系:
(
ξ
,
η
)
=
(
ξ
^
,
η
^
)
/
3
o
r
(
ξ
^
,
η
^
)
=
(
ξ
,
η
)
3
(\xi,\eta)=(\hat{\xi},\hat{\eta})/\sqrt{3}\quad\mathrm{or}\quad(\hat{\xi},\hat{\eta})=(\xi,\eta)\sqrt{3}
(ξ,η)=(ξ^,η^)/3or(ξ^,η^)=(ξ,η)3
单元内任一点的应力 σ P \sigma _P σP,由4个高斯积分点应力 σ G i \sigma _{Gi} σGi进行插值时,可表示为
σ P = ∑ i = 1 4 N i σ G i = [ N 1 ( ξ ^ , η ^ ) N 2 ( ξ ^ , η ^ ) N 3 ( ξ ^ , η ^ ) N 4 ( ξ ^ , η ^ ) ] [ σ G 1 σ G 2 σ G 3 σ G 4 ] \sigma_{P}=\sum_{i=1}^{4}N_{i}\sigma_{Gi}=\begin{bmatrix}N_{1}(\hat{\xi},\hat{\eta})N_{2}(\hat{\xi},\hat{\eta})N_{3}(\hat{\xi},\hat{\eta})N_{4}(\hat{\xi},\hat{\eta})\end{bmatrix}\begin{bmatrix}\sigma_{G1}\\\sigma_{G2}\\\sigma_{G3}\\\sigma_{G4}\end{bmatrix} σP=i=1∑4NiσGi=[N1(ξ^,η^)N2(ξ^,η^)N3(ξ^,η^)N4(ξ^,η^)] σG1σG2σG3σG4
其中, N ( ξ ^ , η ^ ) N(\hat{\xi},\hat{\eta}) N(ξ^,η^)是基于高斯积分点的形函数,第一个积分点的坐标在母单元坐标系下为(-1,-1),根据上述的坐标系转换的方式,在高斯积分点的坐标系下,第一个单元节点在高斯积分点坐标系下坐标为$\left( -\sqrt{3},-\sqrt{3} \right) $,将此坐标值代入第一个形函数,得 1 + 3 2 1+\frac{\sqrt{3}}{2} 1+23,相同的道理,可推导至四个节点在4个形函数下的 4 × 4 4 \times 4 4×4外插矩阵:
[ σ 1 σ 2 σ 3 σ 4 ] = [ 1 + 0.5 3 − 0.5 1 − 0.5 3 − 0.5 − 0.5 1 + 0.5 3 − 0.5 1 − 0.5 3 1 − 0.5 3 − 0.5 1 + 0.5 3 − 0.5 − 0.5 1 − 0.5 3 − 0.5 1 + 0.5 3 ] [ σ G 1 σ G 2 σ G 3 σ G 4 ] \begin{bmatrix}\sigma_1\\\sigma_2\\\sigma_3\\\sigma_4\end{bmatrix}=\begin{bmatrix}1+0.5\sqrt{3}&-0.5&1-0.5\sqrt{3}&-0.5\\-0.5&1+0.5\sqrt{3}&-0.5&1-0.5\sqrt{3}\\1-0.5\sqrt{3}&-0.5&1+0.5\sqrt{3}&-0.5\\-0.5&1-0.5\sqrt{3}&-0.5&1+0.5\sqrt{3}\end{bmatrix}\begin{bmatrix}\sigma_{G1}\\\sigma_{G2}\\\sigma_{G3}\\\sigma_{G4}\end{bmatrix} σ1σ2σ3σ4 = 1+0.53−0.51−0.53−0.5−0.51+0.53−0.51−0.531−0.53−0.51+0.53−0.5−0.51−0.53−0.51+0.53 σG1σG2σG3σG4
数值实现
借助以上理论,我们可以基于matlab平台编制以下代码段:
% 将积分点应力外插至单元节点上,这里只列举了Q4的情况
for i = 1:3
StressElem(e,:,i) = [1+0.5*sqrt(3) -0.5 1-0.5*sqrt(3) -0.5;
-0.5 1+0.5*sqrt(3) -0.5 1-0.5*sqrt(3);
1-0.5*sqrt(3) -0.5 1+0.5*sqrt(3) -0.5;
-0.5 1-0.5*sqrt(3) -0.5 1+0.5*sqrt(3)]*...
[stress(e,1,i);stress(e,2,i);stress(e,3,i);stress(e,4,i)];
end
对标Abaqus
模型材料参数为普通的线弹性材料,单元类型选择CPS4,网格划分及边界条件设置如下:

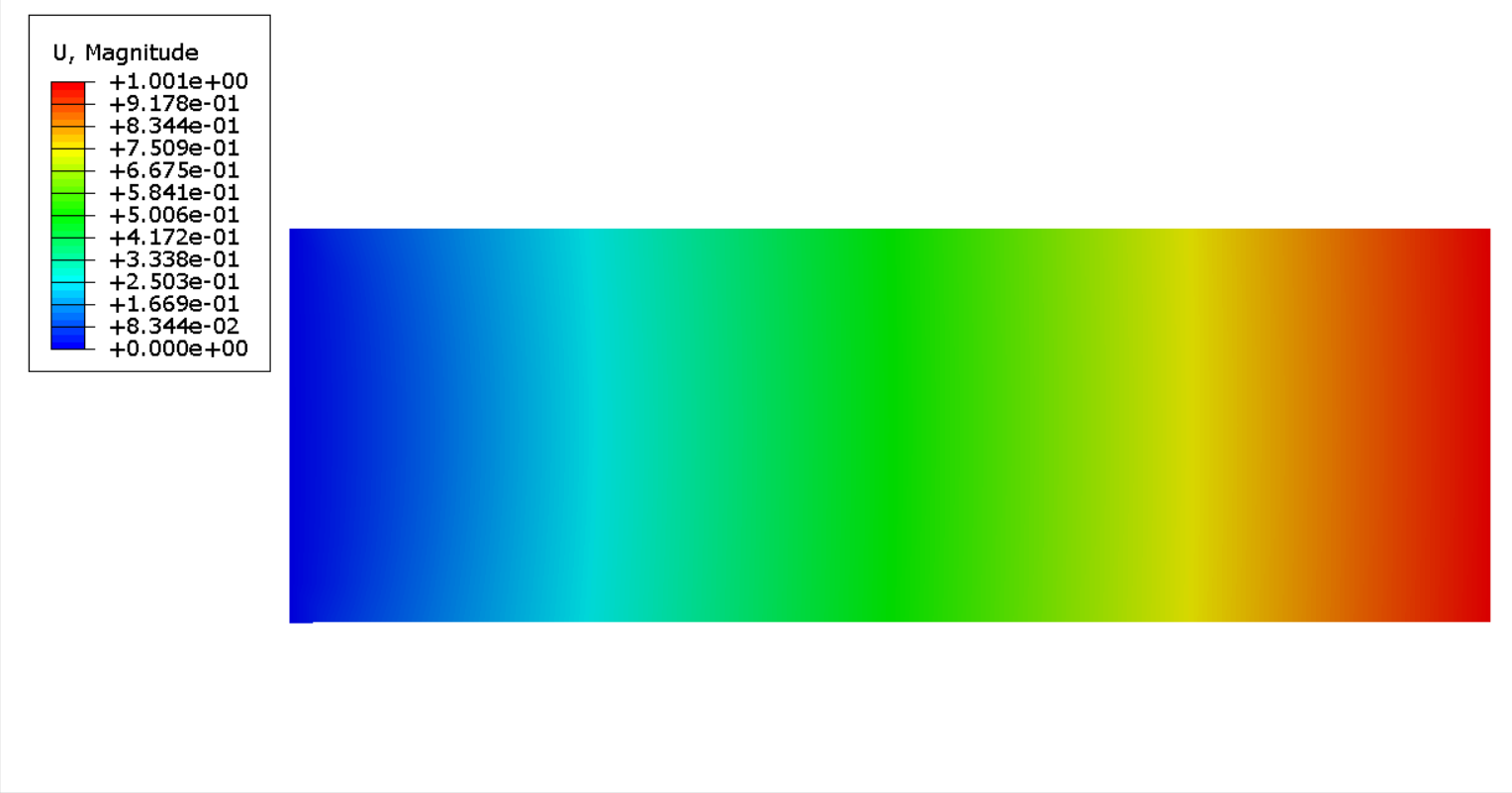
在结果对标过程中,可以先对比自研程序与Abaqus的节点位移场:

在位移场一致的前提下,我们再来对标应力结果。以常见的mises应力为例:
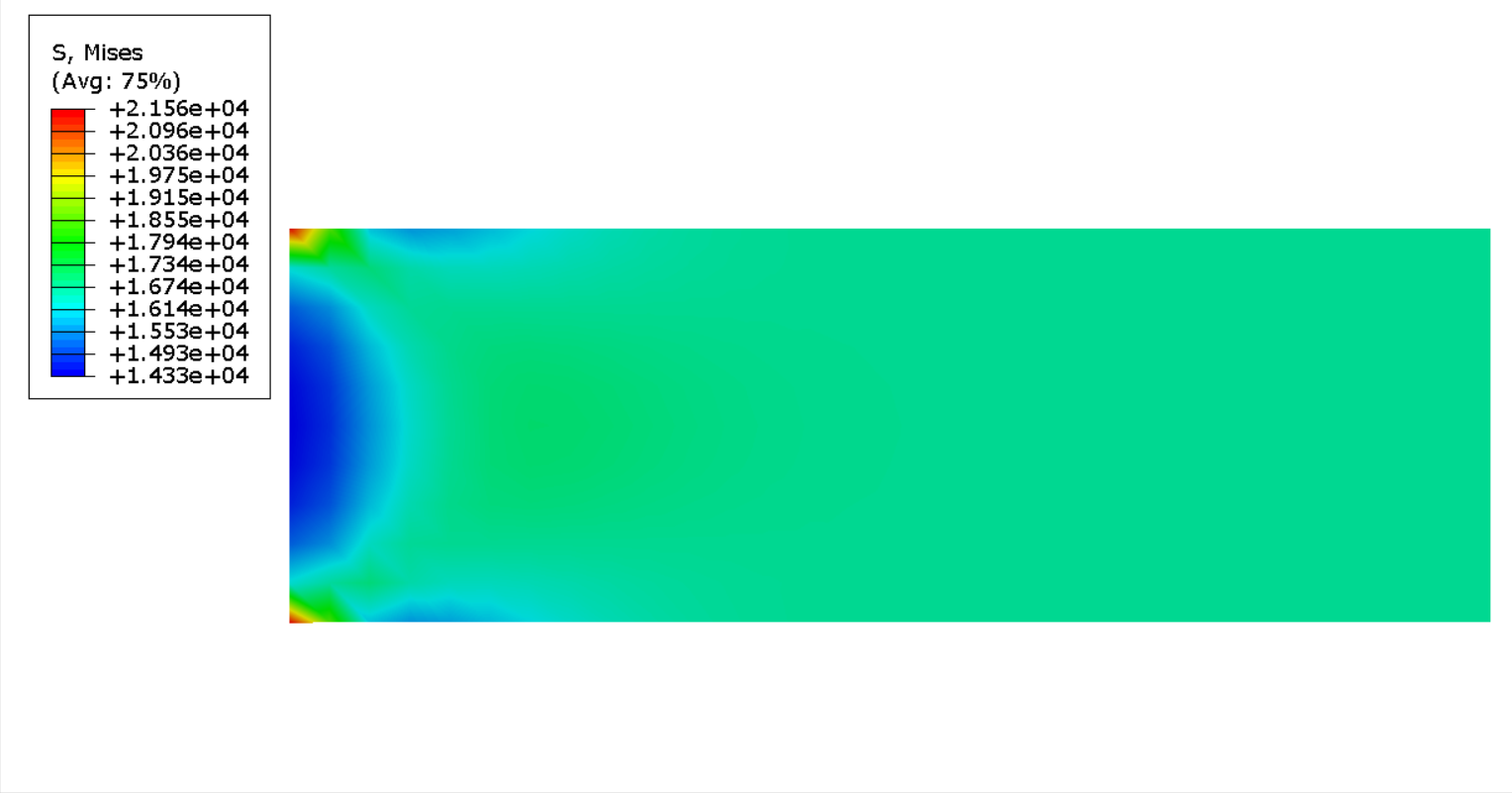

结果是一致的,说明了程序的正确性。
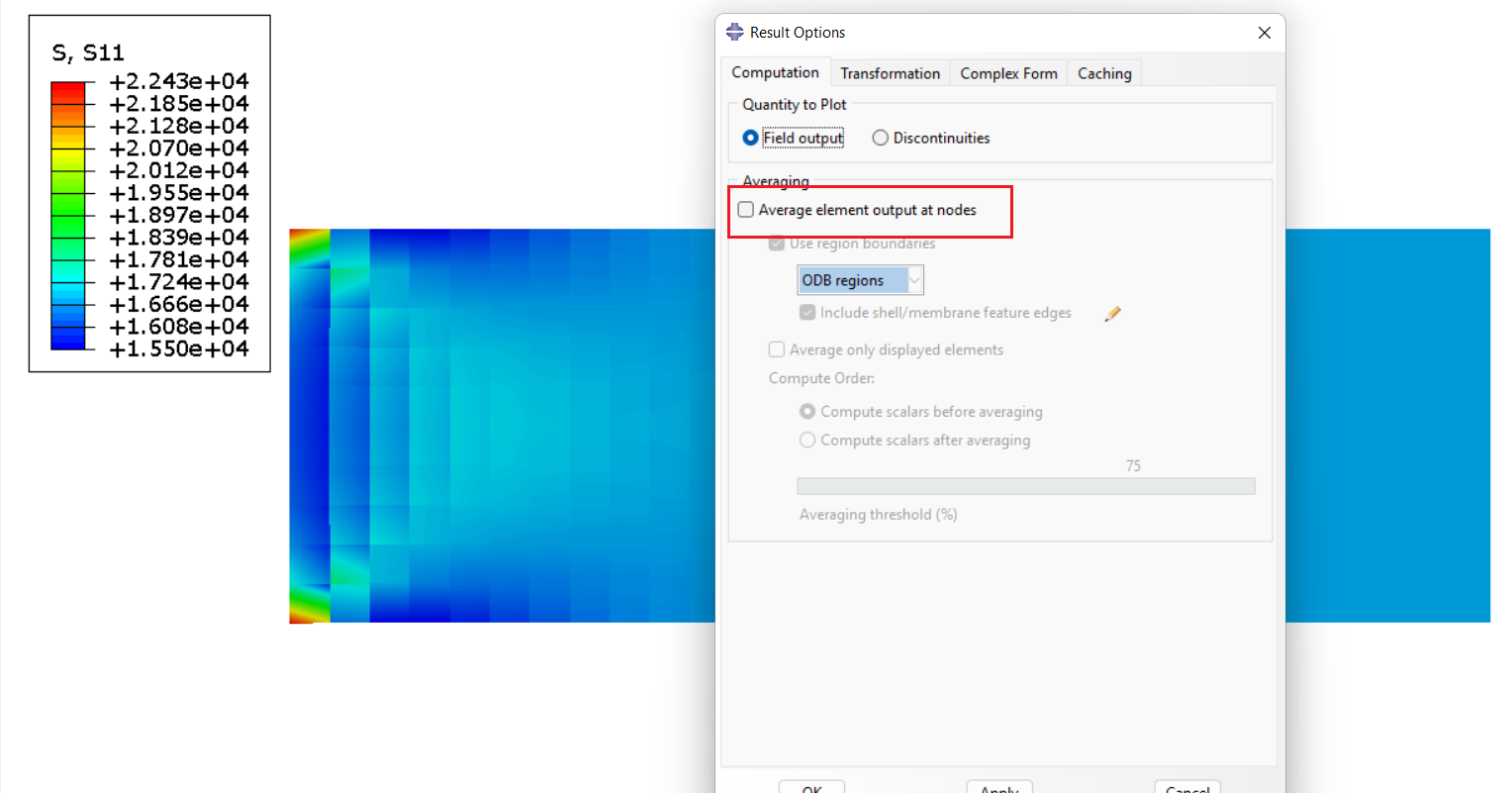
如果我们还想看一下细节方面的,以1号单元的节点应力 s 11 s_{11} s11为例:
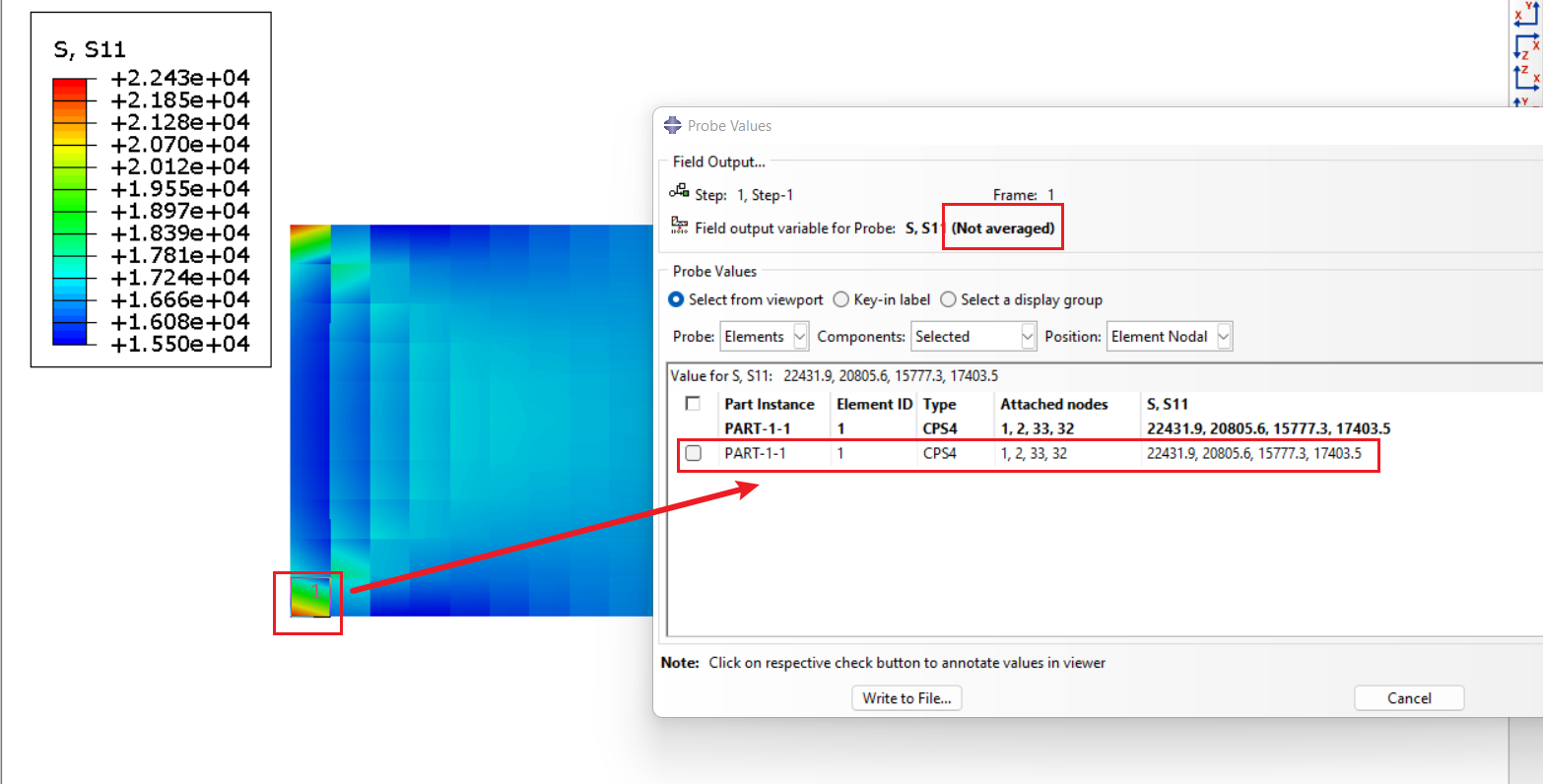
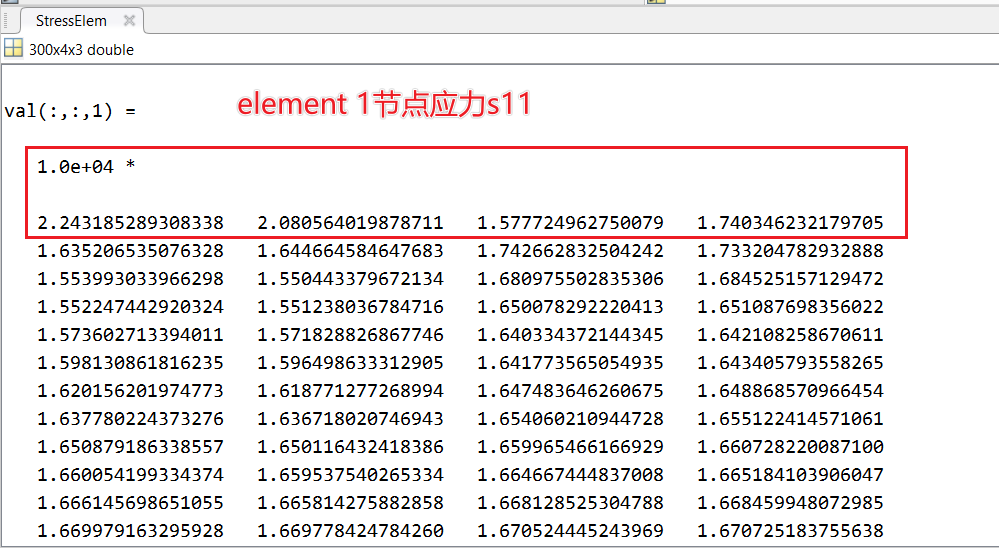
自研程序与Abaqus的结果也是一致的,在提取Abaqus单元节点应力时,应该将应力平滑选项取消勾选,即:
单元积分点应力外插matlab函数
function [StressElem,StressNode] = QuadNodeStress(node, element, prop, U, averageType,elemType,guassType)
% 通过节点位移计算节点应力,正应力:Sxx、Syy、Sxy、VonMises
% 增加节点应力均匀化标识:averageType,==1时,采用绕节点直接平均,==2时采用绕节点面积加权平均
E = prop(1);
NU = prop(2);
ID = prop(4);
[numberNodes, ~] = size(node);
[numberElements, ~] = size(element);
StressElem = zeros(numberElements, 3); % 只计算出正应力Sxx、Syy、Sxy即可
StressNode = zeros(numberNodes, 4);
WeightSum = zeros(numberNodes, 1); % 用于加权平均的权重总和
% 根据平面应力/应变状态ID选择应力-应变矩阵
if ID == 1
D = (E/(1-NU^2)) * [1, NU, 0; NU, 1, 0; 0, 0, (1-NU)/2];
elseif ID == 2
D = (E/(1+NU)/(1-2*NU)) * [1-NU, NU, 0; NU, 1-NU, 0; 0, 0, (1-2*NU)/2];
end
% quadrature according to quadType
[gaussWeights,gaussLocations_cols]=gauss(guassType);
stress = zeros(numberElements,size(gaussLocations_cols,1),3);
StressElem = zeros(numberElements,4,3);
elementDof = zeros(1,2*4);
% 遍历所有单元计算单元应力
for e = 1:numberElements
indice = element(e,:);
elementDof(1:2:end)=2*indice-1;
elementDof(2:2:end)=2*indice;
elementNode = element(e, :);
elemNodeCoordinate = node(elementNode, :);
elenode = length(elemNodeCoordinate);
B=zeros(3,2*elenode);
for q = 1:size(gaussWeights,1)
xi_Gauss=gaussLocations_cols(q,1);
eta_Gauss=gaussLocations_cols(q,2);
% shape functions and derivatives
[shapeFunction,naturalDerivatives]=shapeFunctionQuad(xi_Gauss,eta_Gauss,elemType);
% Jacobian matrix, inverse of Jacobian,
% derivatives w.r.t. x,y
[Jacob,XYderivatives] = Jacobian(elemNodeCoordinate,naturalDerivatives);
A = det(Jacob)*4;
% B matrix
B(1,1:2:end) = XYderivatives(:,1)';
B(2,2:2:end) = XYderivatives(:,2)';
B(3,1:2:end) = XYderivatives(:,2)';
B(3,2:2:end) = XYderivatives(:,1)';
% element deformation
strain = B*U(elementDof);
stress(e,q,1:3) = D*strain;
end
% 计算单元应力
% 将积分点应力外插至单元节点上,这里只列举了Q4的情况
for i = 1:3
StressElem(e,:,i) = [1+0.5*sqrt(3) -0.5 1-0.5*sqrt(3) -0.5;
-0.5 1+0.5*sqrt(3) -0.5 1-0.5*sqrt(3);
1-0.5*sqrt(3) -0.5 1+0.5*sqrt(3) -0.5;
-0.5 1-0.5*sqrt(3) -0.5 1+0.5*sqrt(3)]*...
[stress(e,1,i);stress(e,2,i);stress(e,3,i);stress(e,4,i)];
end
...
完整版的代码,我将会放置在《有限元基础编程百科全书》有关平面单元的章节,有待更新~
















 7600
7600

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











