






投影面面积采用格网法计算时,主要还是根据网格尺寸来决定,网格设置的越小,面积也就越准确,但是也会造成计算上的冗余。为此可以基于鞋带公式进行投影面面积的计算工作。
首先需要进行的是将贴合边界统计出来,这就需要使用凹包算法,具体不过多在此处赘述,该算法主要将点云数据内凹型边界提取出来,然后采用中心点方位角法进行点云边界排序处理:
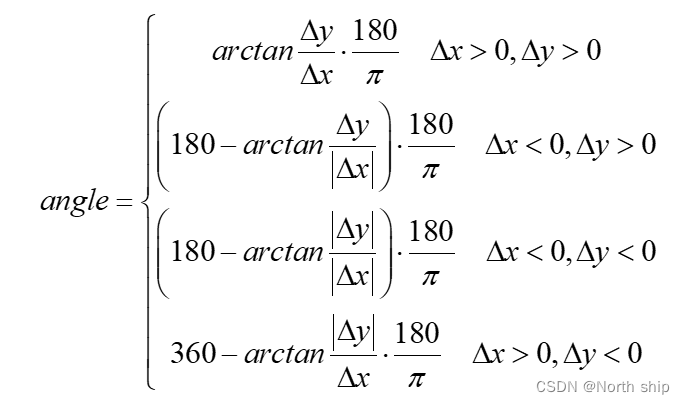
式中为边界点与边界点云中心点的y值作差,
为边界点与边界点云中心点的x值作差, angle则为每个点与中心点计算所得的方位角,然后基于方位角对边界点云按照大小进行排序,排序后基于高斯面积公式进行道路危险区投影面面积计算:

式中为当前点坐标值,
为下一点坐标值。
double area_shoelace_formula(pcl::PointCloud<pcl::PointXYZ>::Ptr& cloud) {//鞋带公式计算投影面积和凹包算法
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_hull(new pcl::PointCloud<pcl::PointXYZ>), cloud2(new pcl::PointCloud<pcl::PointXYZ>);
pcl::ConcaveHull<pcl::PointXYZ> chull;
chull.setInputCloud(cloud);
chull.setAlpha(1);
chull.reconstruct(*cloud_hull);
pcl::PointXYZ maxpt, minpt;
pcl::getMinMax3D(*cloud_hull, minpt, maxpt);
double xx = (maxpt.x + minpt.x) / 2, yy = (maxpt.y + minpt.y) / 2;
vector<pair<double, int>> pairs;
for (int i{ 0 }; i < cloud_hull->size(); i++) {
double angle{ 0 }, delta_x = cloud_hull->points[i].x - xx, delta_y = cloud_hull->points[i].y - yy;
//第一象限
if (delta_x > 0 && delta_y > 0) {
angle = (atan(delta_y / delta_x)) * 180 / PI;
}
//第二象限
else if (delta_x < 0 && delta_y > 0) {
angle = 180 - (atan(delta_y / abs(delta_x))) * 180 / PI;
}
//第三象限
else if (delta_x < 0 && delta_y < 0) {
angle = 180 + (atan(abs(delta_y) / abs(delta_x))) * 180 / PI;
}
//第四象限
else if (delta_x > 0 && delta_y < 0) {
angle = 360 - (atan(abs(delta_y) / delta_x)) * 180 / PI;
}
pairs.push_back(make_pair(angle, i));
}
sort(pairs.begin(), pairs.end());
double area{ 0 };
for (int i = 0; i < cloud_hull->size()-1; i++)
{
area += cloud_hull->points[pairs[i].second].x * cloud_hull->points[pairs[i + 1].second].y - cloud_hull->points[pairs[i + 1].second].x * cloud_hull->points[pairs[i].second].y;
}
double area_add = cloud_hull->points[pairs[cloud_hull->size() - 1].second].x * cloud_hull->points[pairs[0].second].y - cloud_hull->points[pairs[0].second].x * cloud_hull->points[pairs[cloud_hull->size() - 1].second].y;
area = abs(area+area_add) / 2;
cout << "凹包边界-多边形面积公式计算得到面积为" << area << endl;
return area;
}














 4371
4371

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









