







目录
摘 要
本系统以设计题目的要求为目的,采用51单片机为控制核心,利用红外线传感器进行寻线,控制电动小汽车的自动循迹,并再通过光电开关探测障碍,从而控制电机转向,实现进行壁障功能。整个系统的电路结构简单,可靠性能高,实验测试结果满足要求。本文着重叙述了该系统的硬件设计方法、软件设计方法及测试结果分析。小车运行方案,在现有玩具电动车的基础上,加装红外线光电开关模块和红外寻线模块,实现对电动车位置、运行状况的实时测量,并将测量数据传送至单片机进行处理,然后由单片机根据所检测的各种数据实现对电动车的智能控制。
关键词:51单片机、红外线传感器、光电开关、小车
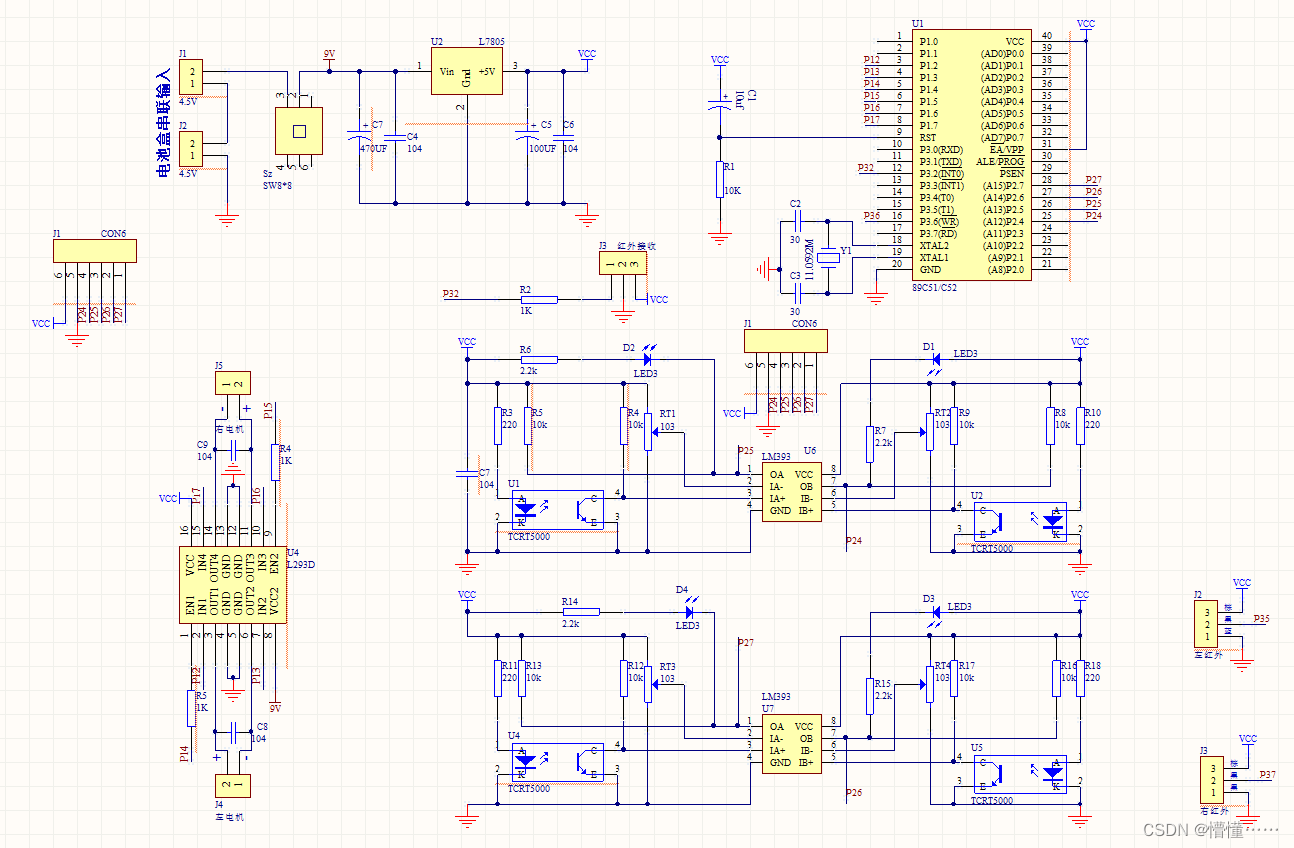
一、硬件方案
硬件构成:单片机+最小系统+L293D电机驱动模块+稳压电路+按键电路+红外避障电路+红外遥控电路+红外循迹电路
二、设计功能
本设计基于单片机型号:STC89C52/51、AT89C52/51、AT89S52/51都可通用。
1.开机默认红外遥控模式,通过遥控器上的前后左右可以调节行驶方向。
2.按下2键切换为红外避障模式,单侧遇到障碍物转动躲避,双侧均有障碍物向后旋转掉头躲避;
3.按下3键为红外循迹模式,循迹过程中如果红外避障探头检测到有障碍物,小车会停止前进。
4.遥控器左上角的红色按键可以让小车停止运行,并切换为红外遥控模式。
三、成品实物图

四、原理图
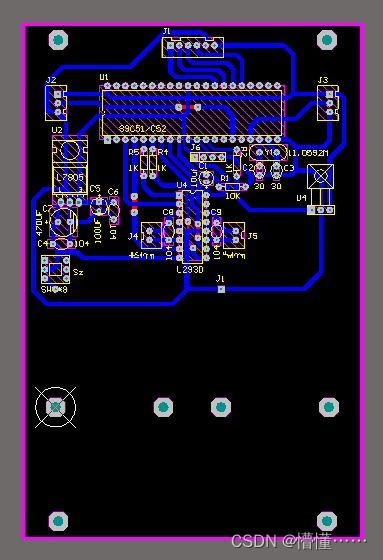
五、PCB图
六、程序源码
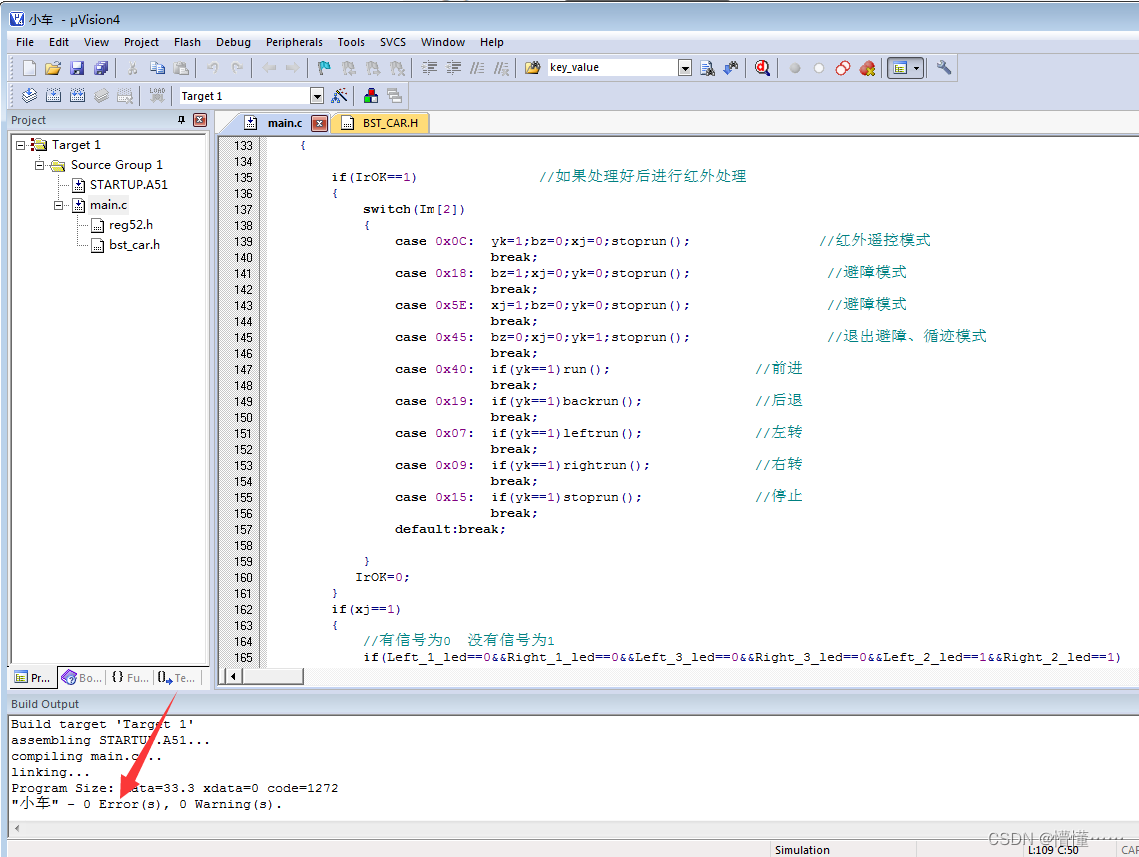
部分代码:
资料包括:
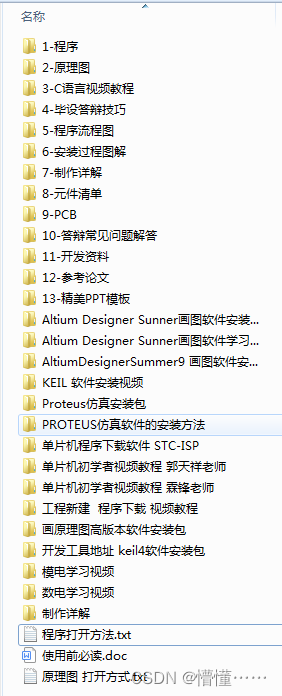
需要完整的资料可以点击下面的名片加下我,找我要资源压缩包的百度网盘下载地址及提取码。

















 928
928

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









