







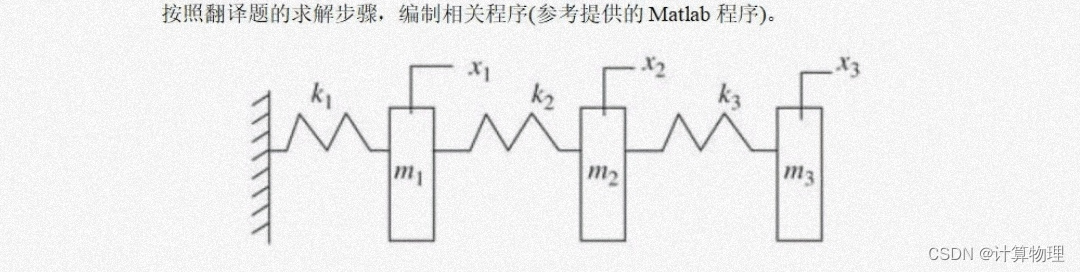
三个弹簧振子理论建立如图 1 所示的一维三弹簧振子的实验系 统:三个弹簧振子的质量均为m1,m2,m3,弹簧的劲度系 数分别为k1,k2和k3 ,三个谐振子在微振动过程 中相对自身的平衡位置的位移分别为x1、x2 和 x3 ,取x1、x2 和 x3 广义坐标,则系统的动力学方程可表示为:
- 代码
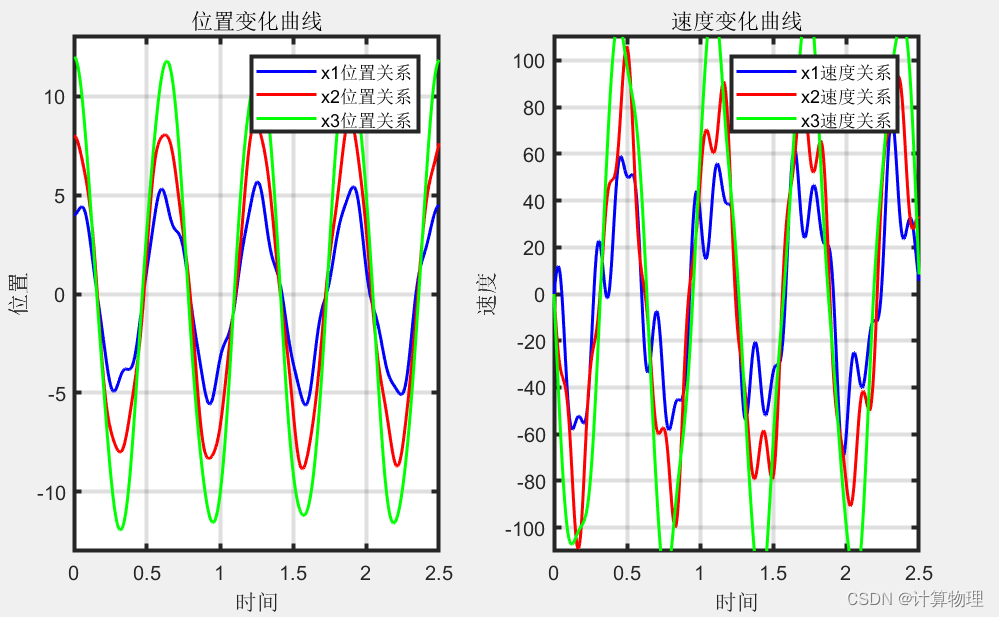
弹簧摆摆动图
clc;clear;
global k1 k2 k3 M1 M2 M3
k1=145000;
k2=180000;
k3=121000;
M1=220;
M2=240;
M3=350;
t1=[0,5];H1=[4;0;8;0;12;0];
[t,H] = ode45(@dH,t1,H1);%求解动力学方程
figure('numbertitle','off','name','弹簧摆摆动图');
subplot(1,2,1);
plot(t,H(:,1),'b','linestyle','-','LineWidth',1.5);hold on;
plot(t,H(:,3),'r','linestyle','-','LineWidth',1.5);hold on;
plot(t,H(:,5),'g','linestyle','-','LineWidth',1.5);hold on;
legend('x1位置关系','x2位置关系','x3位置关系');axis([0 2.5 -13 13]);
set(gca,'linewidth',2); title('位置变化曲线');
xlabel('时间');ylabel('位置');box on;grid on;
subplot(1,2,2);
plot(t,H(:,2),'b','linestyle','-','LineWidth',1.5);hold on;
plot(t,H(:,4),'r','linestyle','-','LineWidth',1.5);hold on;
plot(t,H(:,6),'g','linestyle','-','LineWidth',1.5);hold on;
legend('x1速度关系','x2速度关系','x3速度关系');axis([0 2.5 -110 110]);
set(gca,'linewidth',2); title('速度变化曲线');
xlabel('时间');ylabel('速度');box on;grid on;
function dHdt=dH(t,H)
global k1 k2 k3 M1 M2 M3
dHdt=zeros(6,1);
dHdt(1)=H(2);
dHdt(2)=-k1*H(1)/M1+k2*(H(3)-H(1))/M1;
dHdt(3)=H(4);
dHdt(4)=-k2*(H(3)-H(1))/M2+k3*(H(5)-H(3))/M2;
dHdt(5)=H(6);
dHdt(6)=k3*(H(3)-H(5))/M3;
end
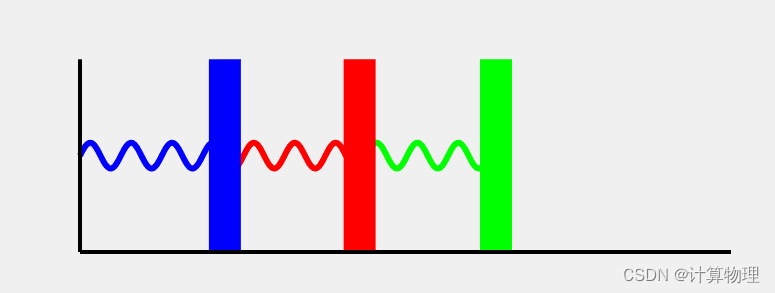
弹簧动图
clc;clear;
global k1 k2 k3 M1 M2 M3
k1=145000;
k2=180000;
k3=121000;
M1=220;
M2=240;
M3=350;
t1=[0,5];H1=[4;0;8;0;12;0];
[t,H] = ode45(@dH,t1,H1);%求解动力学方程
figure('numbertitle','off','name','弹簧轨迹图');
R=0.3;
xx1=20;xx2=40;xx3=60;
for i=1:10:length(t);
clf;hold on;
gg1=0:0.1:xx1+H(i,1);yy1=0.15+0.02*sin(gg1);
plot(gg1,yy1,'LineWidth',3,'Color','b');hold on;%第一个弹簧
gg2=xx1+H(i,1):0.1:xx2+H(i,3);yy2=0.15+0.02*sin(gg2);
plot(gg2,yy2,'LineWidth',3,'Color','r');hold on;%第二个弹簧
gg3=xx2+H(i,3):0.1:xx3+H(i,5);yy3=0.15+0.02*sin(gg3);
plot(gg3,yy3,'LineWidth',3,'Color','g');hold on;%第三个弹簧
plot([xx1+H(i,1),xx1+H(i,1)],[0,R],'LineWidth',16,'Color','b');hold on;%第一个物体
plot([xx2+H(i,3),xx2+H(i,3)],[0,R],'LineWidth',16,'Color','r');hold on;%第二个物体
plot([xx3+H(i,5),xx3+H(i,5)],[0,R],'LineWidth',16,'Color','g');hold on;%第三个物体
line([0,0],[0,0.3],'color','k','linewidth',2);hold on;
line([0,100],[0 0],'color','k','linewidth',2);hold on;
xlabel('x');ylabel('y');box on;
hold off;set(gca,'Visible','off');%设置边框宽度
axis([0 100 0 0.8]);
pause(0.5);%加坐标边框%加网格线%可以在这里添加输出动图的程序
drawnow;%实时更新坐标图窗口
end
function dHdt=dH(t,H)
global k1 k2 k3 M1 M2 M3
dHdt=zeros(6,1);
dHdt(1)=H(2);
dHdt(2)=-k1*H(1)/M1+k2*(H(3)-H(1))/M1;
dHdt(3)=H(4);
dHdt(4)=-k2*(H(3)-H(1))/M2+k3*(H(5)-H(3))/M2;
dHdt(5)=H(6);
dHdt(6)=k3*(H(3)-H(5))/M3;
end

















 7661
7661

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









