







本文所述代码实现了一个 三维状态的扩展卡尔曼滤波 (Extended Kalman Filter, EKF) 算法。通过生成过程噪声和观测噪声,对真实状态进行滤波估计,同时对比了滤波前后状态量的误差和误差累积分布曲线。
简介
代码分为以下几个部分:
-
初始化部分
- 清理工作区环境,设置随机数种子,定义时间序列。
- 定义过程噪声协方差矩阵
Q和观测噪声协方差矩阵R。 - 初始化真实状态矩阵
X、观测值矩阵Z和滤波估计状态矩阵X_kf。
-
运动模型
- 模拟真实状态、未滤波状态(带噪声)以及观测值的变化,生成数据序列。
-
扩展卡尔曼滤波 ( E K F EKF EKF)
- 实现 EKF 的预测和更新步骤,逐步对状态进行滤波估计。
- 计算状态协方差矩阵的更新和卡尔曼增益。
-
绘图
- 绘制滤波前后状态量的对比曲线。
- 绘制滤波前后绝对误差的对比曲线。
- 绘制误差的累积概率分布 ( C D F CDF CDF) 对比图。
-
误差输出
- 计算并输出滤波前和滤波后各维度的最大误差值。
运行结果
-
状态量曲线:
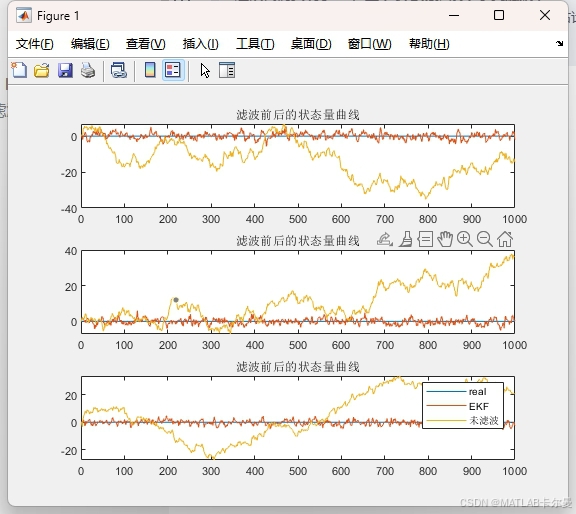
-
误差曲线:
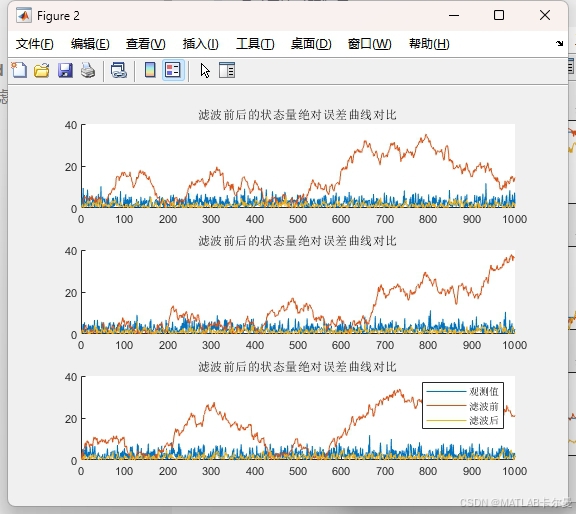
-
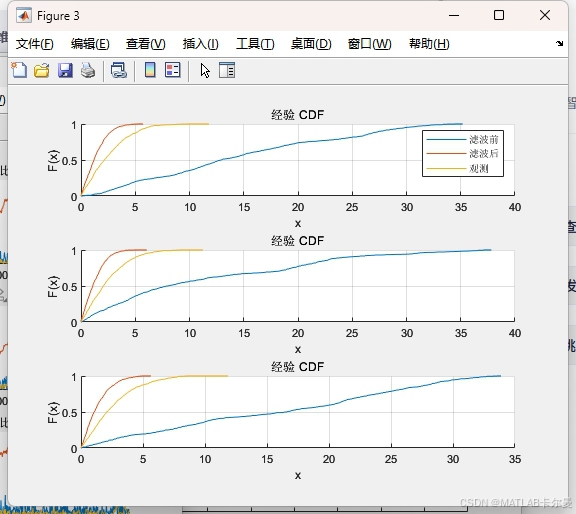
误差CDF曲线(越靠近左上表示误差整体越小):
MATLAB源代码
部分代码如下:
% KF,3维
% 2025-05-12/Ver1
clear; clc; close all;% 清除变量、命令行和图形窗口
rng(0); % 设置随机数种子
%% 滤波模型初始化
t = 1:1:1000; %设置时间序列
Q = 1 * diag(ones(1,3)); % 过程噪声协方差矩阵
w = sqrt(Q) * randn(3, length(t)); % 过程噪声
R = 10 * diag(ones(1,3)); % 观测噪声协方差矩阵
v = sqrt(R) * randn(3, length(t)); % 观测噪声
P0 = 1 * eye(3); % 初始状态协方差矩阵
X = zeros(3, length(t)); % 真实状态
X_kf = zeros(3, length(t)); % 扩展卡尔曼滤波估计的状态
Z = zeros(3, length(t)); % 观测值形式
%% 运动模型
X_ = zeros(3, length(t)); %给带误差的(未滤波的)状态量建立空间
X_(:, 1) = X(:, 1); %给带误差的状态量赋初值
完整代码下载链接:https://download.csdn.net/download/callmeup/90819699
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者


















 446
446

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











