






支持长按、短按、双击、顺时针逆时针、按钮按下顺时针逆时针
ec11编码器原理不再介绍
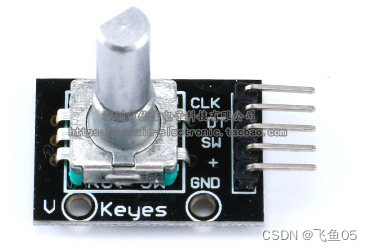
使用如下旋转编码器:
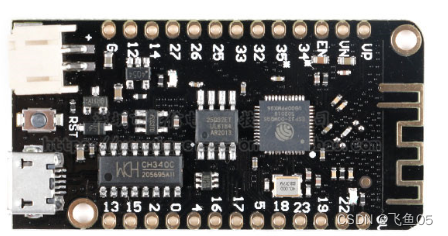
开发板如下:
接线:
CLK --> GPIO14
DT --> GPIO12
SW --> GPIO19
+ --> 3V3
GND --> GND
使用如下库:
lib_deps =
mathertel/OneButton@^2.0.3
t-vk/ESP32 BLE Keyboard@^0.3.2
madhephaestus/ESP32Encoder@^0.10.1
库使用可参考文档和其他文章。
为了节省MCU利用率,使用中断方式而不使用轮询方式。
代码如下,可实现功能:
模式0自定义短按、双击、顺时针逆时针、按钮按下顺时针逆时针功能
模式1自定义短按、双击、顺时针逆时针、按钮按下顺时针逆时针功能
长按切换两种模式(可自行添加多种模式),(按下旋转松手后不会切换模式)
此示例中:
模式0:短按静音/取消静音,双击蓝牙输入测试,顺时针音量加,逆时针音量键、按钮按下顺时针逆时针无功能。
模式1:短按Enter,双击蓝牙输入测试,顺时针右方向键,逆时针左方向键,按钮按下顺时针下方向键,按钮按下逆时针上方向键。
烧录后串口查看当前动作、模式和编码器计数
电脑蓝牙连接ESP32-BleKeyboard
#include <Arduino.h>
#include "BleKeyboard.h"
#include "OneButton.h"
#include <ESP32Encoder.h>
//按键配置
#define EC11_A_PIN 12
#define EC11_B_PIN 14
#define EC11_K_PIN 19//按键引脚
//键盘名称:ESP32-BleKeyboard
BleKeyboard bleKeyboard("ESP32-Keyboard", "Espressif", 100);
ESP32Encoder encoder;
OneButton SW(EC11_K_PIN, true);
int lastEncoderValue = 0;
int now_count = 0;
int mode = 0; //0,1两种mode,可自行添加
bool activate = true;
//按键单击回调函数
void click() {
if (mode == 0) {
Serial.println("Click: MUTE");
bleKeyboard.write(KEY_MEDIA_MUTE);
}
if (mode == 1) {
Serial.println("Enter");
bleKeyboard.write(KEY_RETURN);
}
}
//按键长按回调函数
void longclick() {
if (activate) { //如果旋钮转动,则不切换状态
Serial.println("Longclick: Mode Change");
Serial.print("current mode: ");
if (mode == 0) {
mode = 1;
Serial.println("Arrow");
return;
}
if (mode == 1) {
mode = 0;
Serial.println("Media");
return;
}
}
activate = true;
}
//按键双击回调函数
void doubleclick() {
if (mode == 0) {
Serial.println("Doubleclick: Input test");
bleKeyboard.print("ESP32-BLEKeyboard Input Test");
}
if (mode == 1) {
Serial.println("Doubleclick: Input test");
bleKeyboard.print("ESP32-BLEKeyboard Input Test");
}
}
void setup() {
Serial.begin(115200);
ESP32Encoder::useInternalWeakPullResistors = UP;
encoder.attachSingleEdge(EC11_A_PIN, EC11_B_PIN);
pinMode(EC11_K_PIN, INPUT_PULLUP);
//初始化按键事件检测
SW.attachClick(click);
SW.attachDoubleClick(doubleclick);
SW.attachLongPressStop(longclick);
SW.setDebounceTicks(20);//滤波(ms)
SW.setClickTicks(200);
SW.setPressTicks(500);
Serial.println("Starting BLE work");
bleKeyboard.begin();
}
void loop() {
SW.tick();
if (bleKeyboard.isConnected()) {
if (lastEncoderValue != encoder.getCount()) {
now_count = encoder.getCount();
if (now_count != lastEncoderValue) {
if (!SW.isIdle()) { //检测按键是否空闲
activate = false;
Serial.print("(Long_pressed)Encoder value: ");
Serial.println(now_count);
} else {
Serial.print("Encoder value: ");
Serial.println(now_count);
}
}
if (now_count > lastEncoderValue) {
if (!SW.isIdle()) { //检测按键是否空闲
if (mode == 0) {} //模式0按钮按下顺时针功能
if (mode == 1) { //模式1按钮按下顺时针功能
bleKeyboard.write(KEY_DOWN_ARROW);
Serial.println("DOWN_ARROW");
}
} else {
if (mode == 0) { //模式0顺时针功能
bleKeyboard.write(KEY_MEDIA_VOLUME_UP);
Serial.println("MEDIA_VOLUME_UP");
}
if (mode == 1) { //模式1顺时针功能
bleKeyboard.write(KEY_RIGHT_ARROW);
Serial.println("RIGHT_ARROW");
}
}
}
if (now_count < lastEncoderValue) {
if (!SW.isIdle()) { //检测按键是否空闲
if (mode == 0) {} //模式0按钮按下逆时针功能
if (mode == 1) { //模式1按钮按下逆时针功能
bleKeyboard.write(KEY_UP_ARROW);
Serial.println("UP_ARROW");
}
} else {
if (mode == 0) { //模式0逆时针功能
bleKeyboard.write(KEY_MEDIA_VOLUME_DOWN);
Serial.println("MEDIA_VOLUME_DOWN");
}
if (mode == 1) { //模式1逆时针功能
bleKeyboard.write(KEY_LEFT_ARROW);
Serial.println("LEFT_ARROW");
}
}
}
lastEncoderValue = now_count;
}
}
}















 3408
3408











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









