






基于点云的3D场景理解
关键词:点云,3D场景,PointNet
参考视频:https://www.bilibili.com/video/BV1As411377S?spm_id_from=333.337.search-card.all.click&vd_source=7266164bac828afa96b5c3e3dcb1b738
目标:解决点云的特征提取,实现分类等任务。
为什么不用CNN等网络?因为有的数据结构不具有结构化特征,没有办法带入到CNN中进行训练预测
PointNet
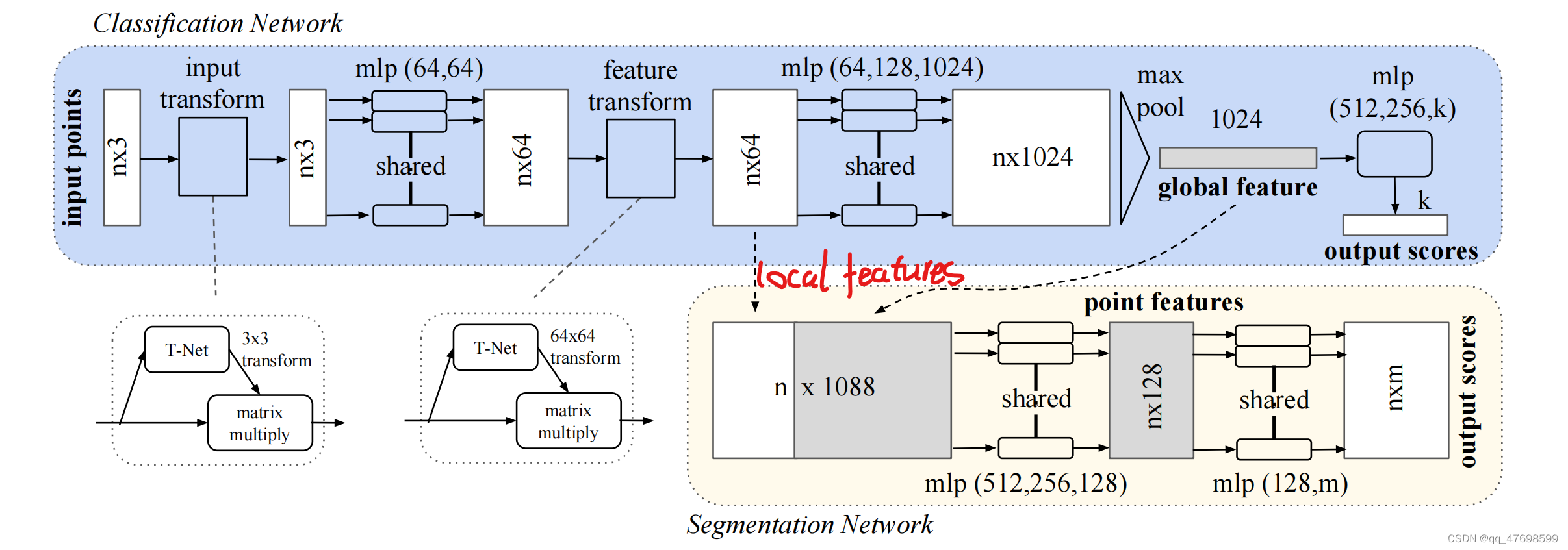
PointNet的网络结构:
其中input是n个点,3是指XYZ轴坐标,也可以添加其他特征信息(如RGB信息、压力、速度等);使用transform是为了与T-Net输出的变换矩阵相乘,从而实现视角的不变性transform invariance,如若改变点云的观测视角,通过变换矩阵的相乘能够调整回来;再通过多层感知机MLP实现特征的升维,这样能够保证在后续的对称函数(maxpooling)的施加下不会丢失过多的信息;使用maxpooling得到点云的全局特征,保证了置换不变性(即改变点集n3中的排列顺序,最终全局特征保持不变);若输出的是点云的类别,则使用global feature继续进行mlp操作,输出k维向量;若输出的是点云中各个点的信息(如压力预测、全局语义分割),则结合global features和local features形成n1088的特征,再经过计算得到n*m,m是指输出的维度(如语义分割的类别数)。
PointNet++
上述PointNet网络的不足之处在于:没有考虑局部信息local context,只结合了全局特征,这样会导致做点云级预测时效果不佳。
PointNet++的提出解决了上述的问题,引入采样和成组方法sampling&grouping,得到局部区域点集,再对局部区域点集进行PointNet(保证了置换不变性);并且提出了Multi-scale grouping (MSG)和Multi-resolution grouping (MRG)方法来解决点云密度不均匀分布的问题。
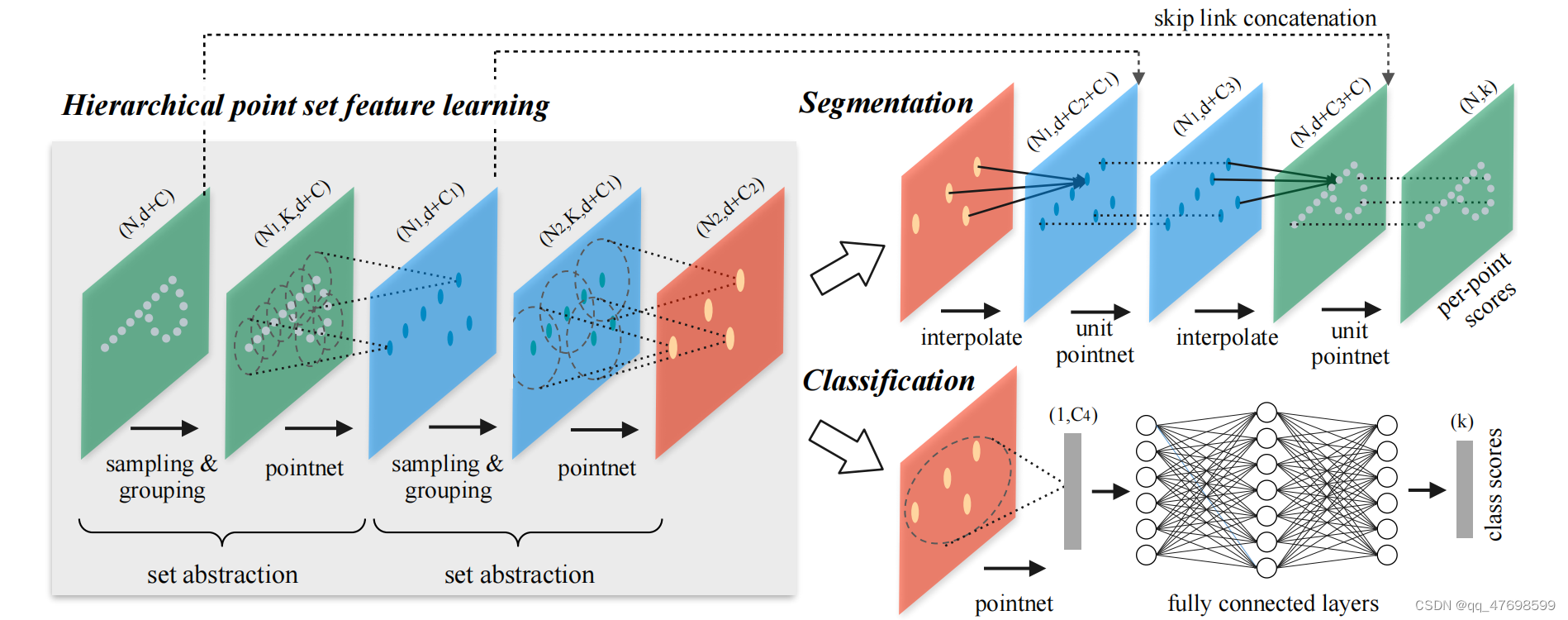
PointNet++的结构:
首先原始点云((N,d+C)中N时点的个数,d是坐标特征,C是其余特征),使用了 farthest point sampling (FPS)进行中心点采样,再将一定范围内的点组成group,构成(N1,K,d+C),其中N1是group的个数,K是各个group中点的个数;再用point net对每个group单独处理,得到d+C1的特征,由于有N1个group,则输出(N1,d+C1),在这的pointnet实现将K个向量融合得到一个向量;最后根据任务的不同进行不同的downstream。
对于点云中的group定义距离怎么确定?对于点云分布的不均匀性怎么解决?
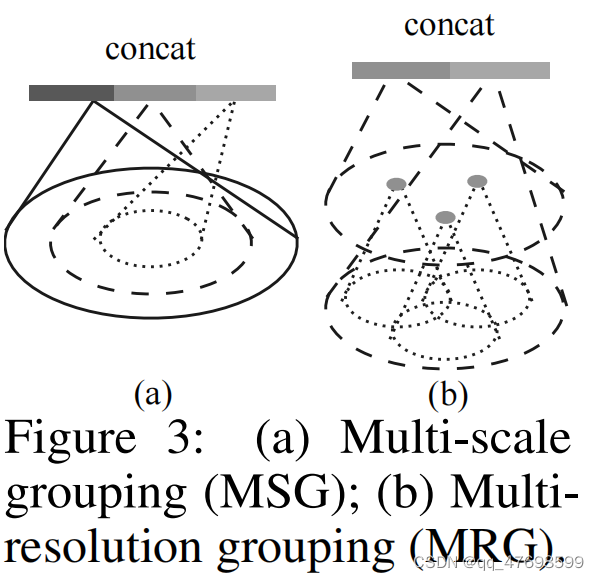
Multi-scale grouping (MSG)和Multi-resolution grouping (MRG)方法能够解决该问题。
Multi-scale grouping (MSG)
通过引入dropout,但是这个dropout是针对输入的数据点而言的,不是针对网络节点,以dropout的概率去除点云的点,使用留下的点做pointnet运算,得到一个特征向量,通过改变dropout概率(在[0,p]中均匀采样,p人为定义),获得多个特征向量,再concat在一起,作为C1进行后续的计算
Multi-resolution grouping (MRG)
通过设置多层group采样,最后的C1是由倒数第一层的point net输出向量和第一层的pointnet输出向量构成。















 7659
7659











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









