







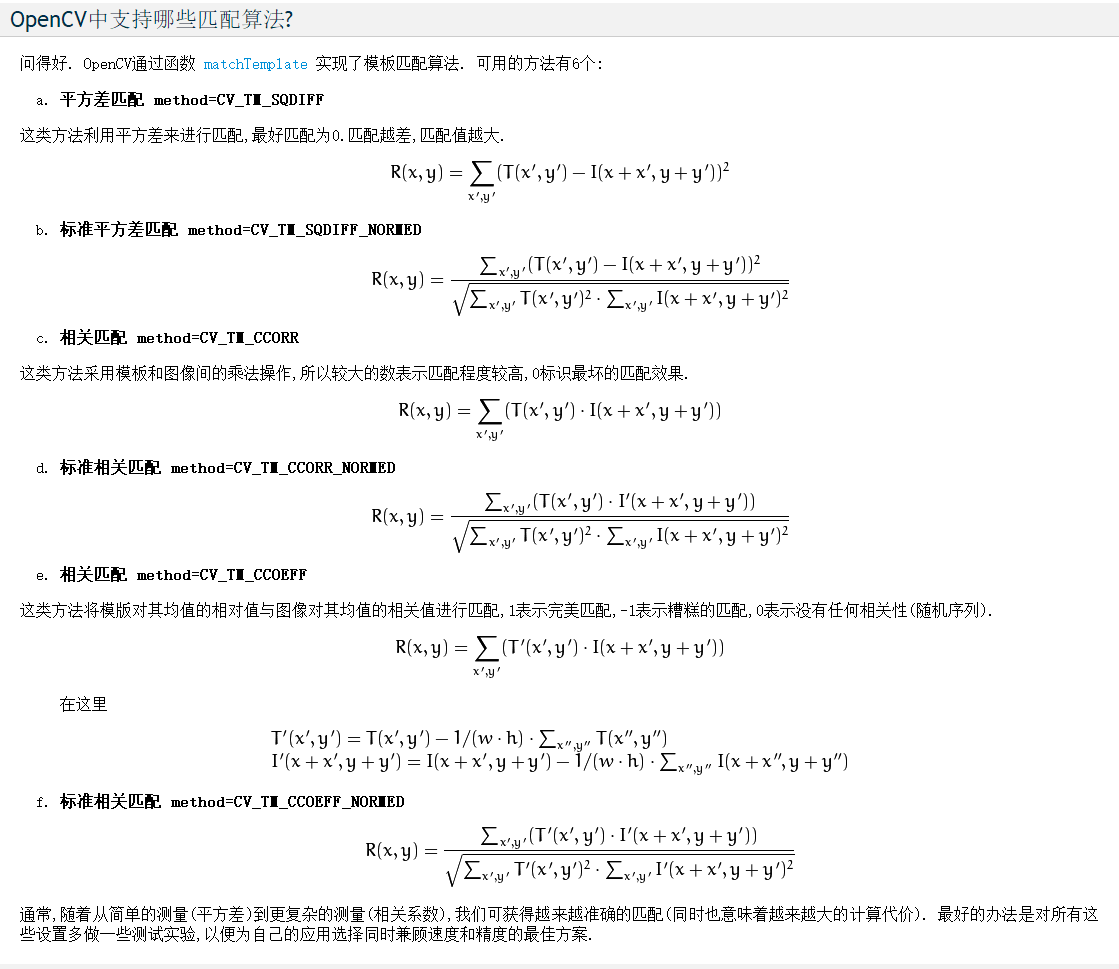
 本文详细解读OpenCV中的MatchTemplate函数,介绍其六种匹配方法(TM_SQDIFF, TM_SQDIFF_NORMED, TM_CCORR, TM_CCORR_NORMED, TM_CCOEFF, TM_CCOEFF_NORMED)的原理、优缺点和适用场景,并通过实例演示和模板变形实验展示不同方法的效果差异。
本文详细解读OpenCV中的MatchTemplate函数,介绍其六种匹配方法(TM_SQDIFF, TM_SQDIFF_NORMED, TM_CCORR, TM_CCORR_NORMED, TM_CCOEFF, TM_CCOEFF_NORMED)的原理、优缺点和适用场景,并通过实例演示和模板变形实验展示不同方法的效果差异。
【 OpenCV 】MatchTemplate函数参数详解及原理分析
模板匹配是在一幅图像中寻找一个特定目标的方法之一,这种方法的原理非常简单,遍历图像中的每一个可能的位置,比较各处与模板是否“相似”,当相似度足够高时,就认为找到了我们的目标。OpenCV提供了6种模板匹配算法。
MatchTemplate
MatchTemplate(InputArray image, InputArray templ, OutputArray result, int method);
image:输入一个待匹配的图像,支持8U或者32F。
templ:输入一个模板图像,与image相同类型。
result:输出保存结果的矩阵,32F类型。
method:要使用的数据比较方法。
1.result:
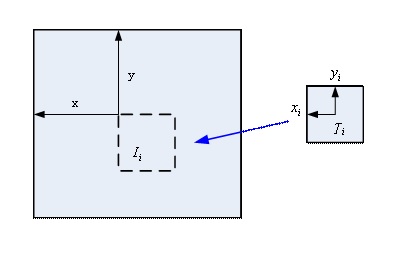
result是一个结果矩阵,假设待匹配图像为 I,宽高为(W,H),模板图像为 T,宽高为(w,h)。那么result的大小就为(W-w+1,H-h+1) 。
2.method
场景适用原理分析:
cv::TM_SQDIFF 判断 minVal 越小,效果越好
计算模板与目标图像的方差,由于是像素值差值的平方的和,所以值越小匹配程度越高;
cv::TM_SQDIFF_NORMED 判断 minVal 越接近0,效果越好
范化的cv::TM_SQDIFF,取值为0-1之间,完美匹配返回值为0;
cv::TM_CCORR 判断 maxVal 越大,效果越好
使用dot product计算匹配度,越高匹配度就好;
cv::TM_CCORR_NORMED 判断 maxVal 越接近1,效果越好
范化的cv::TM_CCORR,0-1之间,我用的这个;
cv::TM_CCOEFF 判断 maxVal 越大,效果越好
采用模板与目标图像像素与各自图像的平均值计算dot product,正值越大匹配度越高,负值越大图像的区别越大,但如果图像没有明显的特征(即图像中的像素值与平均值接近)则返回值越接近0;
cv::TM_CCOEFF_NORMED 判断 maxVal 越接近1,效果越好
范化的cv::TM_CCOEFF,-1 ~ 1之间。
优缺点与适用场景:
TM_CCORR:
**互相关算法**(cross-correlation)是一种经典的统计匹配算法,通过计算模板图像和匹配图像的互相关程度,来确定匹配的程度。互相关程度最大时的搜索窗口位置决定了模板图像在待匹配图像中的位置。
特点
擅长区分出(有颜色差异的)不同区域。
TM_SQDIFF:
误差平方和算法(Sum of Squared Differences,简称SSD算法),也叫差方和算法
优点
- 思路简单,容易理解(子图与模板图对应位置上,灰度值之差的绝对值总和,再求平均)。
- 运算过程简单,匹配精度高。
缺点
- 运算量偏大。
- 对噪声非常敏感。
TM_CCOEFF
均值漂移的互相关算法(Mean shifted cross correlation [Pearson correlation coefficient])。是互相关算法(cross correlation)和均值漂移算法的结合。
优点
算法计算量小,简单易实现,很适合于实时跟踪场合
缺点
跟踪小目标和快速移动目标时常常失败,而且在全部遮挡情况下不能自我恢复跟踪
TM_CCORR_NORMED
归一化互相关(Normalized Cross Correlation method, NCC)匹配算法。
它是一个亮度、对比度线性不变量。
此算法的缺点是参与运算的特征点比较多,运算速度比较慢。
其他归一化算法
TM_SQDIFF_NORMED`和 `TM_CCOEFF_NORMED
实验比较
使用trackbar调节不同method
const char* trackbar_label = "Method: \n 0: SQDIFF \n 1: SQDIFF NORMED \n 2: TM CCORR \n 3: TM CCORR NORMED \n 4: TM COEFF \n 5: TM COEFF NORMED";
createTrackbar(trackbar_label, image_window, &match_method, max_Trackbar, MatchingMethod);
MatchingMethod(0, 0);
模板匹配
void MatchingMethod(int, void*)
{
Mat img_display;
img.copyTo(img_display);
int result_cols = img.cols - templ.cols + 1;
int result_rows = img.rows - templ.rows + 1;
result.create(result_rows, result_cols, CV_32FC1);
matchTemplate(img, templ, result, match_method);
normalize(result, result, 0, 1, NORM_MINMAX, -1, Mat());//将结果归一化防止溢出,显示
double minVal; double maxVal; Point minLoc; Point maxLoc;
Point matchLoc;
minMaxLoc(result, &minVal, &maxVal, &minLoc, &maxLoc, Mat());//不同方法对应最小值与最大值不同
if (match_method == TM_SQDIFF || match_method == TM_SQDIFF_NORMED)
{
matchLoc = minLoc;
}
else
{
matchLoc = maxLoc;
}
rectangle(img_display, matchLoc, Point(matchLoc.x + templ.cols, matchLoc.y + templ.rows), Scalar::all(0), 2, 8, 0);//绘制矩形
// rectangle(result, matchLoc, Point(matchLoc.x + templ.cols, matchLoc.y + templ.rows), Scalar::all(0), 2, 8, 0);
imshow(image_window, img_display);
imshow(result_window, result);
imshow("template", templ);
return;
}
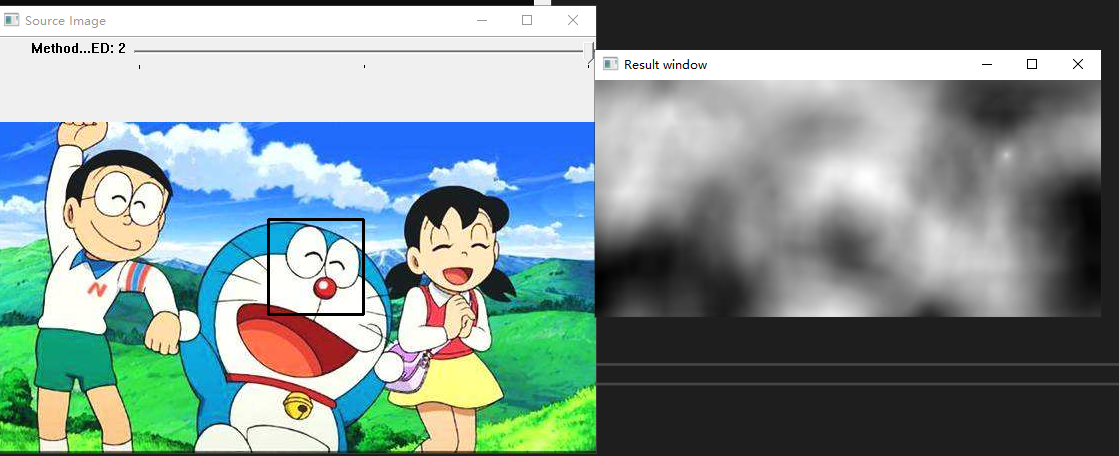
实验结果
TM_SQDIFF(mode 0)和TM_CCOEFF_NORMED(mode 5)进行对比:
TM_SQDIFF:
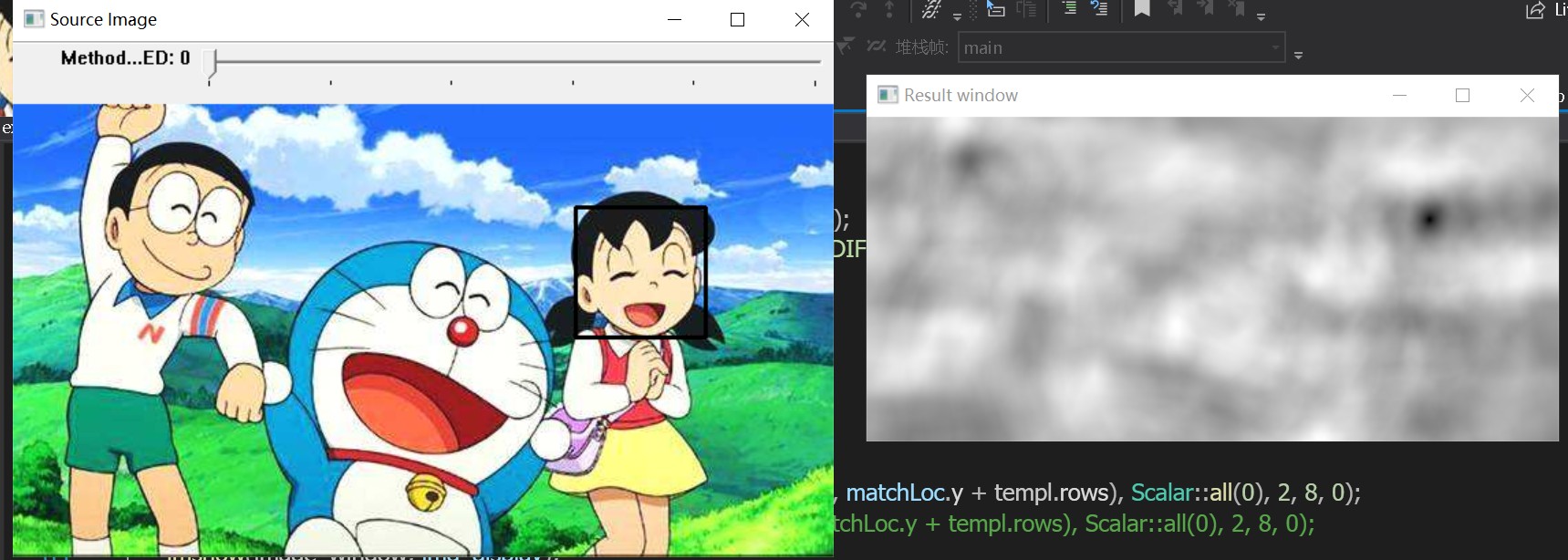
0对应最匹配位置;
TM_CCOEFF_NORMED:
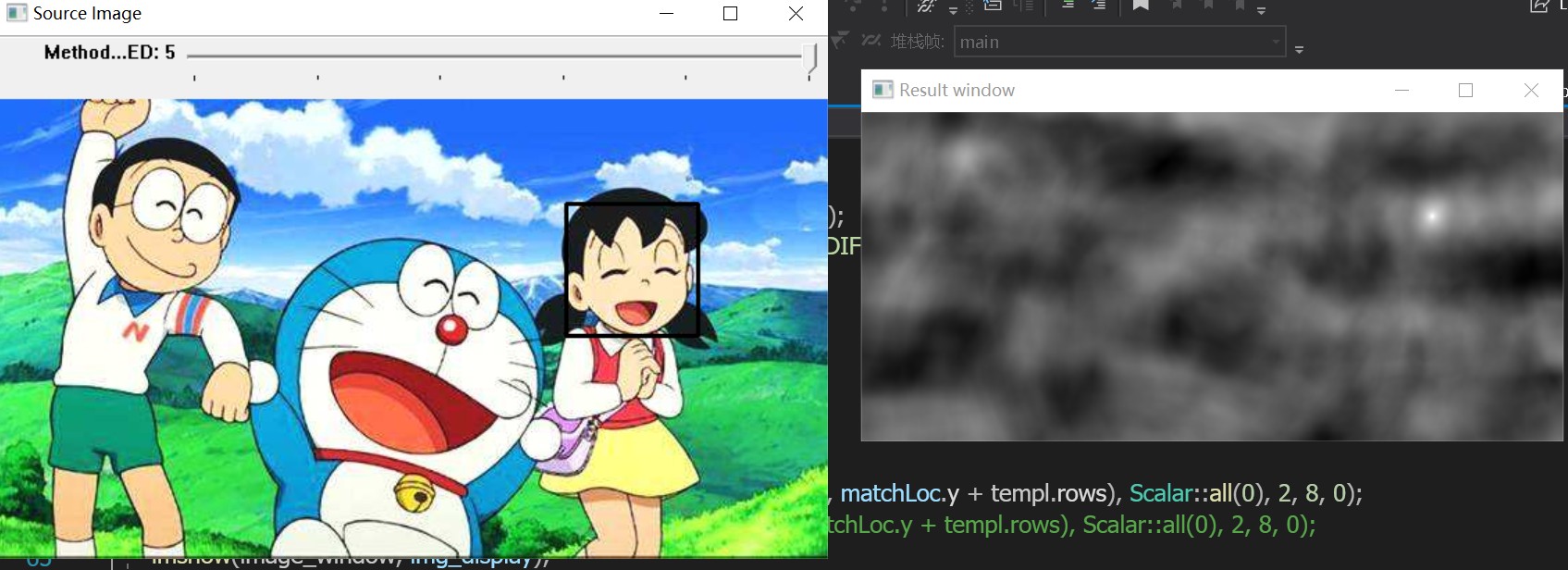
1对应最匹配位置;
模板颜色改变后:

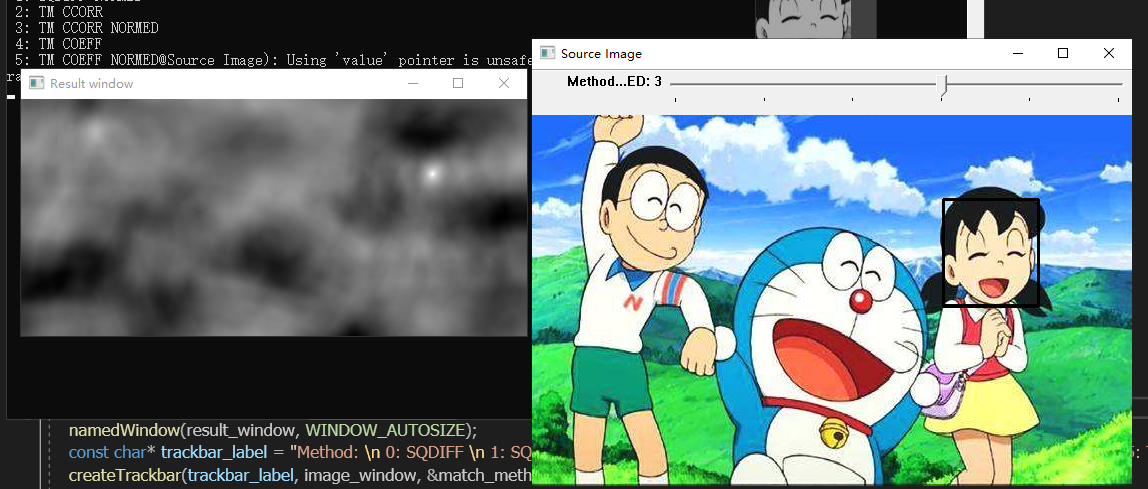
TM_CCORR(mode2)颜色区分不明显造成匹配错误:

TM_CCORR_normal(3)正确:
不同的匹配值不同,但大体能识别出正确的区域。
使用自己头像形变测试形变对于模板匹配的影响,结果上面大致相同。

















 1368
1368

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









