







特征描述
将特征局部图像转化成描述特征的向量
要求
不变性;区分性;
基于模板的匹配方法
衡量算法
SSD(Sum of Square Difference)

SAD(Sum of Absolute Difference)

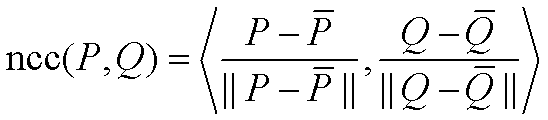
NCC (Normalized Cross Correlation)
利用子图与模板图的灰度,通过归一化的相关性度量公式来计算二者之间的匹配程度。
没有归一化数值过大;
Census Transform特征描述
以一个像素为中心,对周围像素点进行编码,然后对两个匹配像素点进行异或操作,统计结果中的1个数作为汉明距离:
汉明值是两点间相似度的一种体现,汉明值愈小,两点相似度愈大实现算法时先异或再统计1的个数即可,汉明距越小即相似度越高;
cencus方法保留了窗口中像素的位置特征,并且对亮度偏差较为鲁棒,简单讲就是能够减少光照差异引起的误匹配。
Census变换对整体的明暗变化并不敏感,因为是比较的相对灰度关系,所以即使左右影像亮度不一致,也能得到较好的匹配效果。
BRIEF 特征点描述算法
BRIEF算法的具体步骤
(1)建立特征点的一个正方形邻域。
(2)对该邻域用σ=2的高斯核卷积,以消除一些噪声。这是因为该描述子随机性强,对噪声较为敏感。
(3)以一定的随机化算法生成点对< x,y>,若点x的亮度小于点y的亮度,则返回值1,否则返回0。
(4)重复第三步若干次(如256次),得到一个256位的二进制编码,即该特征点的描述子。
随机点对选择:
(1)在图像块内平均采样;
(2)p和q都符合(0 , 1/25 S2)(0 , 1/25 S2)的高斯分布;
(3)p符合(0,1/25 S2)(0,1/25 S2)的高斯分布,而q符合(0,1/100 S2)(0,1/100 S2)的高斯分布;
(4)在空间量化极坐标下的离散位置随机采样;
(5)把p固定为(0,0),q在周围平均采样。
问题
1.对光照颜色变化(加性、线性、仿射、噪音)的稳定性
2.对微小对齐误差的稳定性
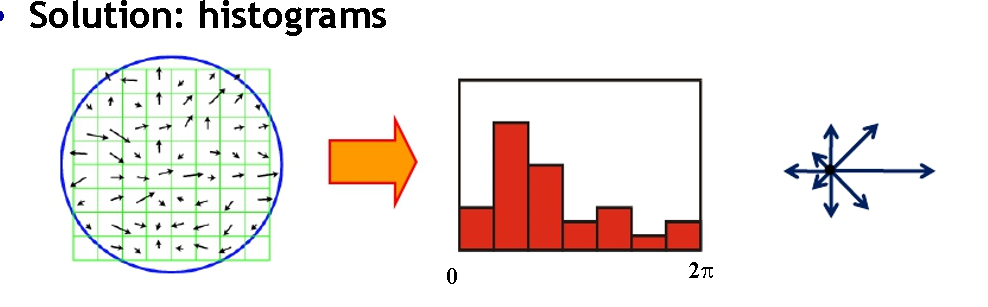
对齐误差
讲一个图像块作为特征描述缺点:
小的偏移就大大影响匹配分数;
解决方式:使用直方图描述一个图像块;
SIFT中的特征描述
sift特征检测
1.尺度空间极值检测
构建高斯金字塔,构建高斯差分金字塔,利用邻域找出不同的极值点
2.关键点定位
极值点不一定对应关键点,通过对极值点拟合得到真正的关键点
3.方向赋值
每个关键点,按照圆圈3 σ \sigma σ出一个区域,统计区域内的方向投票,按照方向得票数最大的作为主方向
4.关键点描述
将关键点周围的领域区域划分成几个子区域,每个区域按照方向给一个方向多少和大小的描述,得到梯度方向直方图。
特征描述:
1.将图像块分成4x4的16个子区域;
2.计算梯度方向直方图(每个像素有一个梯度方向和大小,利用高斯函数加权综合得到描述)
4.结果表示为4x4x8=128维的特征描述向量。
更多基于直方图的特征描述方法
HOG:用于人体描述
PCA-sift:对于每个像素用两个方向描述,窗口大小取41x41不计算最外层,得到39x39x2的特征描述,最后用PCA降维
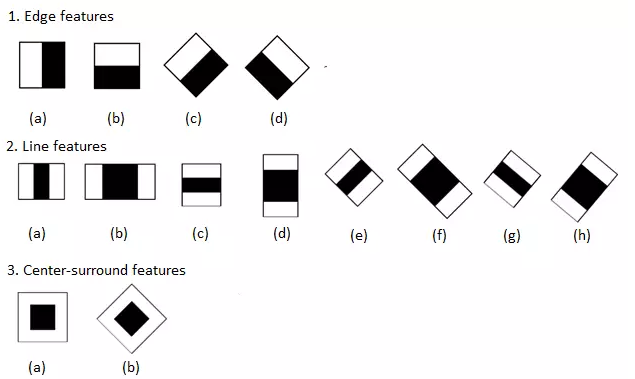
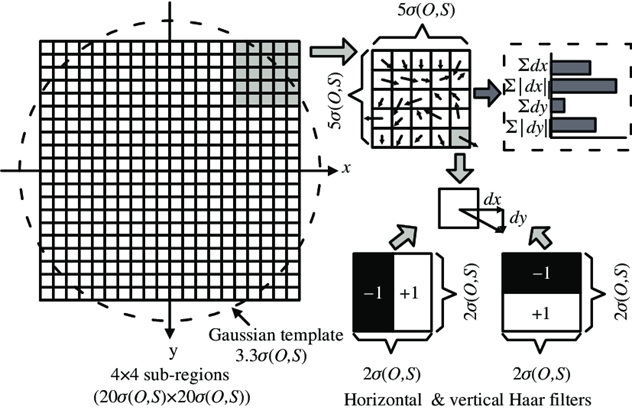
SURF特征描述
使用harr小波(只有四个方向)来特征描述;
harr小波filter:
 黑色区域减去白色区域;
黑色区域减去白色区域;
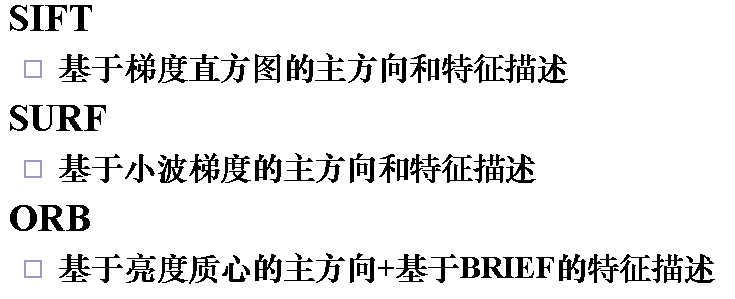 surf中特征描述使用harr小波检测的单个的梯度方向。
surf中特征描述使用harr小波检测的单个的梯度方向。
自主尺度选择
通过LOG响应得到尺度,再将特征重新放缩到对应尺度
旋转不变性
实现:通过主方向确定,然后将图像块根据角度旋转,然后进行特征比较,这样保证旋转不变性。
三种方式:
sift求解梯度:
使用Canny边缘算子在感兴趣点的周围16X16像素点区域计算;
对得到的方向在0-360度范围内分成八个区间,然后将16X16大小的区域分成不重合的4X4个单元,每个单元内计算梯度方向直方图(八个区间)。一共得到16个单元的直方图,将这些直方图接连起来得到长度为128X1的向量,然后将该向量归一化。
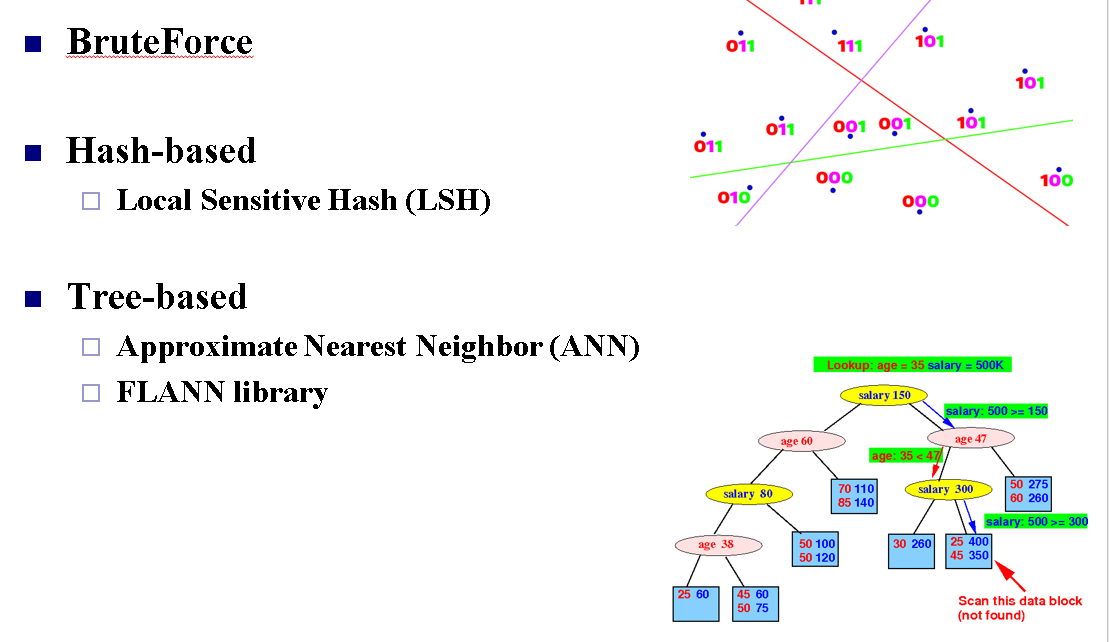
特征匹配
三种方式,通过向量搜索方式
元内计算梯度方向直方图(八个区间)。一共得到16个单元的直方图,将这些直方图接连起来得到长度为128X1的向量,然后将该向量归一化。
特征匹配
三种方式,通过向量搜索方式















 848
848











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









