






编辑切换为居中
添加图片注释,不超过 140 字(可选)
SLAM问题也被称为是CML问题。
编辑切换为居中
添加图片注释,不超过 140 字(可选)
编辑切换为居中
添加图片注释,不超过 140 字(可选)
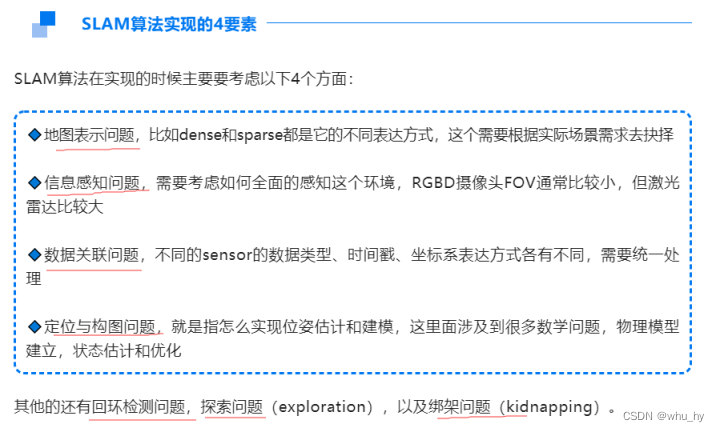
SLAM中涉及到的比较重要的4个问题,地图表示问题,信息感知问题,数据关联问题,定位与构图问题。
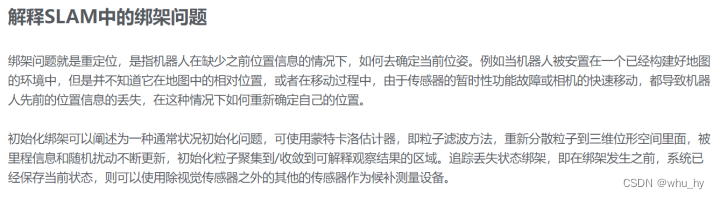
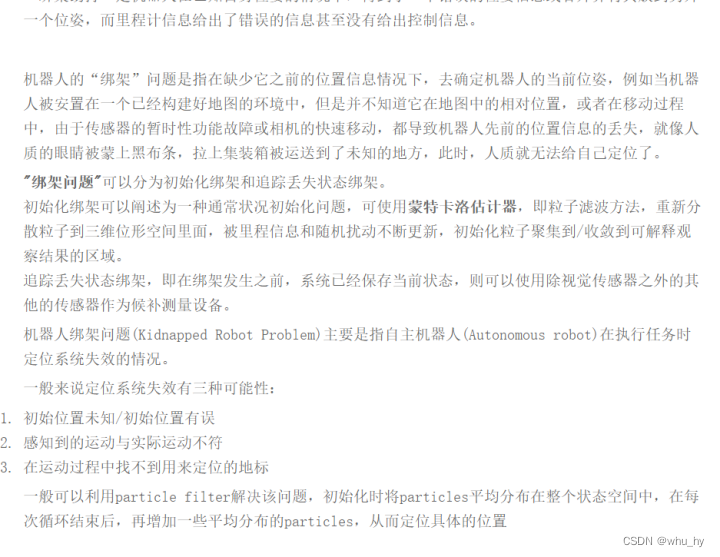
绑架问题:
编辑切换为居中
添加图片注释,不超过 140 字(可选)
绑架问题就是重定位,就是说模拟绑架的场景,被蒙上眼以后就不知道先前的位置信息了,这时候要通过SLAM来进行当前位姿的确定。也即是一个状态初始化的问题。
编辑切换为居中
添加图片注释,不超过 140 字(可选)
参考:http://blog.chinaunix.net/uid-27875-id-5832236.html
编辑切换为居中
添加图片注释,不超过 140 字(可选)


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









