






vins和g2o边缘化的异同:(已经做到ppt里面了,简单回顾一下)
1.《视觉slam14讲》中提及的边缘化(G2O边缘化)是在计算求解过程中,先消去路标点变量,实现先求解相机位姿,然后再利用求解出来的相机位姿反过来计算路标点的过程,目的是为了加速求解,并非真的将路标点给边缘化掉。(补充:G2O是在BA之后提出的,BA就是优化路标点和相机位姿)
2.VINS的边缘化则真正需要边缘化掉滑动窗口中的最老帧和次新帧,目的是希望不再计算这一帧的位姿或者与其相关的路标点,但是希望保留该帧对窗口内其他帧的约束关系。
一个知识点:marg掉以后会使得之后的矩阵失去稀疏性的特点,也即矩阵会变得稠密起来,就是说非零元素的个数会增加。

编辑
添加图片注释,不超过 140 字(可选)
vins的边缘化策略第二点,当次新帧不是关键帧的时候直接丢弃次新帧,但是次新帧的IMU数据需要保留,这是为了保证IMU预积分的连贯性。
单目+imuj系统是4自由度不可观,yaw角+3自由度位置不可观。其中尺度因子由于加速度计的存在而可观。

编辑
添加图片注释,不超过 140 字(可选)
上面四幅图对应能量函数,上面的图告诉我们,能量函数为0的解由以前的一条曲线变成了一个点,不确定性的东西变得确定了,也即不可观的状态变量变得可观了。说明我们人为地引入了错误的信息。在不同的点线性化后,强行加起来,实际上引入了一些人为的约束,或者说引入了人为的错误观测,导致整个系统的崩溃。

编辑
添加图片注释,不超过 140 字(可选)
通过上面能量函数的例子可以说明,在marg的时候,不要在marg之后进行线性化,因为此时的状态和marg之前是不一样的。如果这时候再进行吸纳行话,会引入人为观测,导致整个优化过程崩溃。
因此,marg时,被marg的那些变量的雅可比已经不更新了,而此时留在滑动窗口里的其他变量的雅可比要用和marg时一样的线性点,就是FEJ进行计算,不要用新的线性点了。否则会导致整个问题的零空间被降维,意思即是引入了错误的人为观测约束,使得问题的零空间加入了错误的约束,因此被降维了。

编辑
添加图片注释,不超过 140 字(可选)
根据最后一句话 可能FEJ也不是很必要,但是是一个考点。
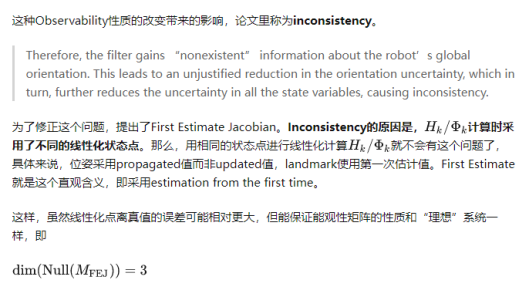
在边缘化的过程中,状态变量会被不断更新,计算边缘化相关的雅可比时需要注意固定线性化点,也就是计算雅可比时求导变量的值要固定,而不是用每次迭代更新以后的x去求雅可比,这就是FEJ(First Estimate Jacobians)。同时这样被称为是系统的一致性问题。
系统的不可观的状态维数是这个矩阵零空间的维数。(之所以说零空间维数降低,就是说不可观的状态维数降低了,也即不可观变得可观了。)
编辑
添加图片注释,不超过 140 字(可选)
就是说计算雅可比矩阵的时候要选择第一次的线性点来进行计算。

编辑
添加图片注释,不超过 140 字(可选)
使用FEJ的意义:为了保证系统的一致性,对于有边缘化信息的非线性优化问题,所有优化变量的雅可比都应该使用优化迭代开始前的雅可比,在优化迭代的过程中不发生变化。就是说在进行边缘化以后,线性化使用的线性点要保持一致,使用同一个线性点来进行Taylor展开,这样才能保证系统不可观的维度。否则,便引入了人为观测误差,这样会使得系统由不可观变成可观,求解出来的结果是不对的!
关于第一估计雅可比(FEJ, First Estimate Jacobians)先进行一个简单的描述,在Marginalize的时候,求解滑动窗口估计器的迭代过程中,会不断迭代计算H矩阵和残差b,而在迭代过程中,状态变量会不断更新,计算雅可比的时候需要固定线性化点(fix the linearization point)。换言之,就是计算雅可比时候求导变量要固定,而不是用每一次迭代更新以后的状态量x去求雅可比。
编辑
添加图片注释,不超过 140 字(可选)
感觉FEJ就是在讲计算雅可比矩阵时的线性化点的选择问题。

编辑
添加图片注释,不超过 140 字(可选)
上面这个图做到ppt里面就行了,就讲两个能量函数,在不同线性点展开,然后相加,最后发现结果从一条直线变成了一个点,也即下系统状态由不可观变得可观起来。(这种现象对slam系统是非常不利的。)

编辑
添加图片注释,不超过 140 字(可选)
上面讲了那么多的可观性,这里对可观性的定义进行一个阐述。就是说当系统可观的时候,那个h函数是一个单射函数,也即一个site对应唯一一个函数值。就是说可以理解成单调递增函数或者单调递减函数即可。
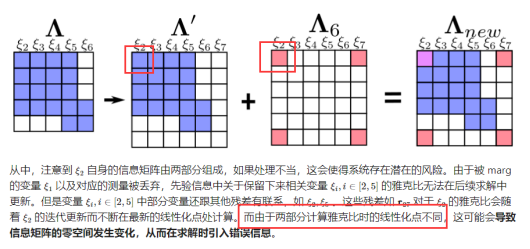
总结:滑动窗口算法中,对于同一变量,不同残差对其计算雅可比矩阵时线性化点可能不一致,导致信息矩阵分成两部分,相当于在信息矩阵中多加了一些信息,使得其零空间出现了变化。FEJ算法:不同残差对同一个状态求雅可比时,线性化点必须一致,这样就能避免零空间退化,也即可以避免不可观变量变得可观。















 5370
5370











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









