




 本文详细探讨了相机标定的原理,包括针孔相机模型、畸变现象和像主点偏移,以及单应性矩阵的求解。相机标定旨在消除镜头畸变,重构三维场景。文章介绍了棋盘格标定策略,并概述了实验内容,包括数据、代码和结果。
本文详细探讨了相机标定的原理,包括针孔相机模型、畸变现象和像主点偏移,以及单应性矩阵的求解。相机标定旨在消除镜头畸变,重构三维场景。文章介绍了棋盘格标定策略,并概述了实验内容,包括数据、代码和结果。
目录
一.相机标定原理:
1.相机标定简介:
在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是相机参数。在大多数条件下这些参数必须通过实验与计算才能得到,这个求解参数的过程就称之为相机标定(或摄像机标定)。
目的:求出相机的内、外参数,以及畸变参数。
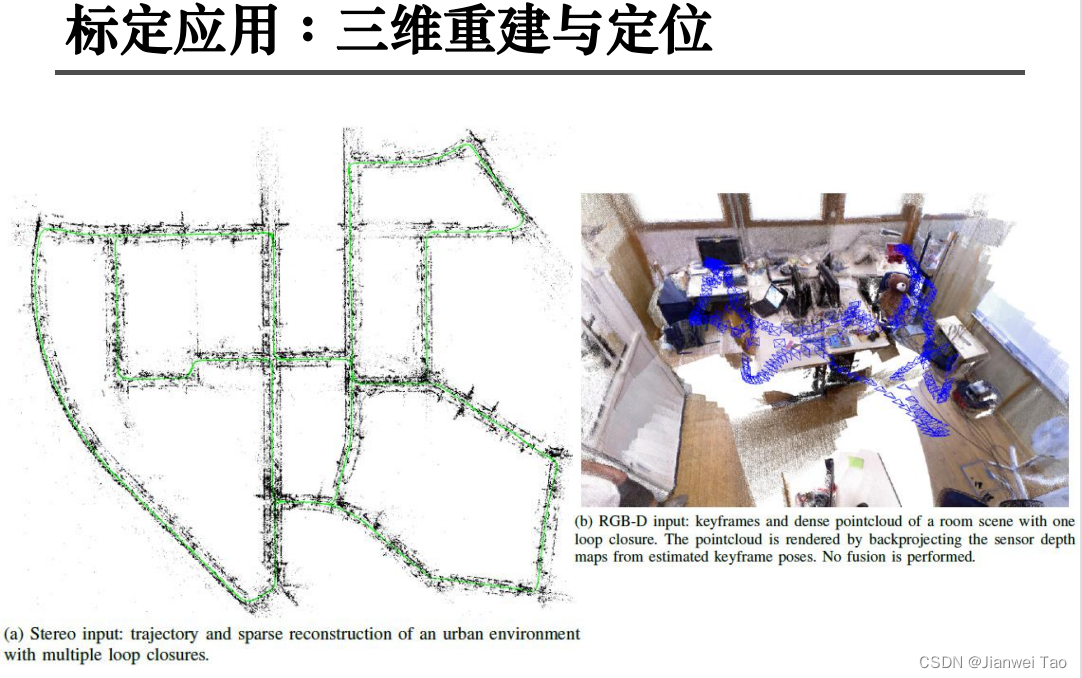
作用: 1.是由于每个镜头的畸变程度各不相同,通过相机标定可以校正这种镜头畸变矫正畸变,生成矫正后的图像;2.是根据获得的图像重构三维场景。
畸变校正:

2.求解原理:
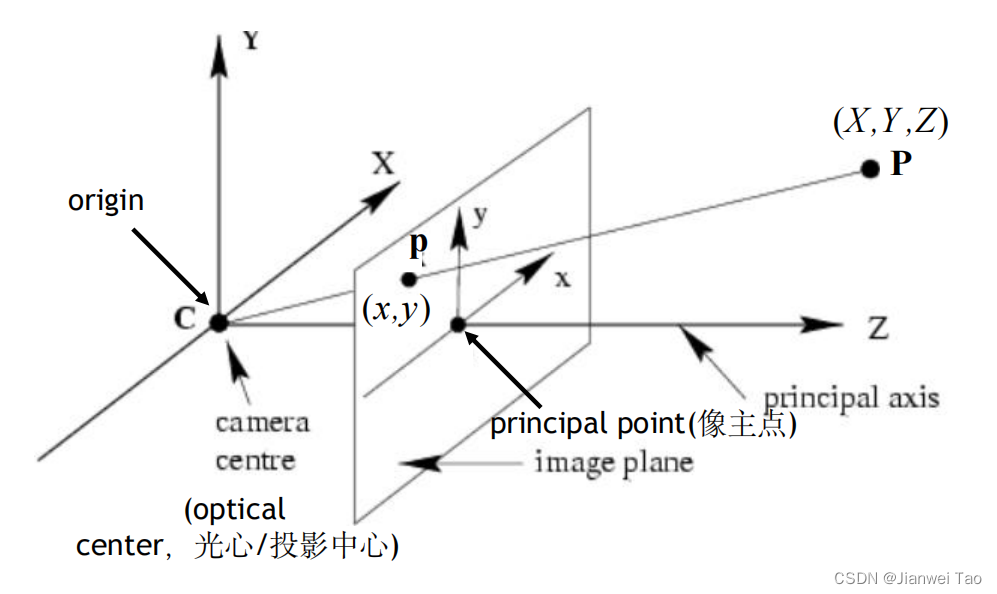
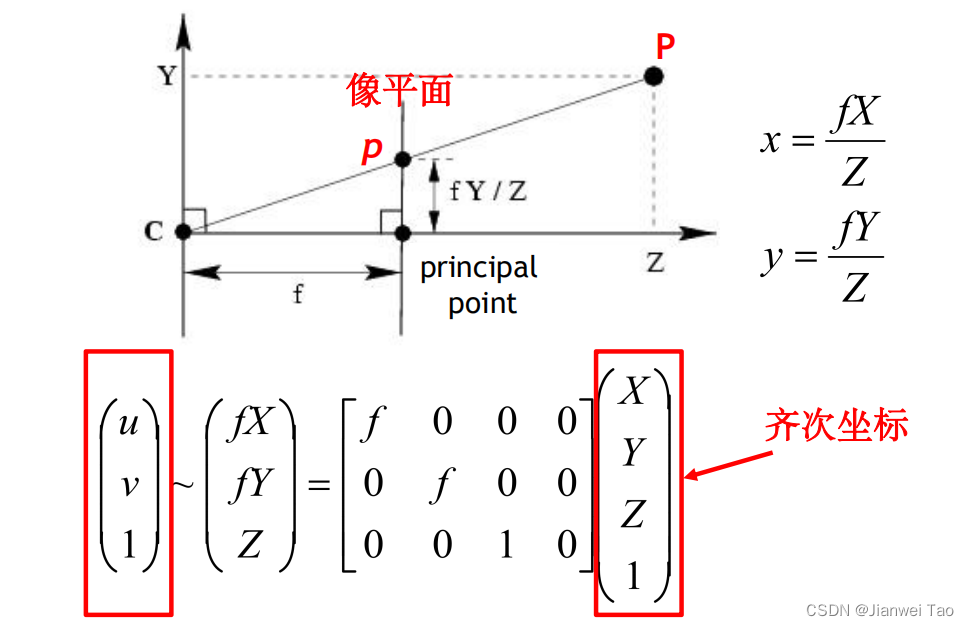
2.1.针孔相机模型:
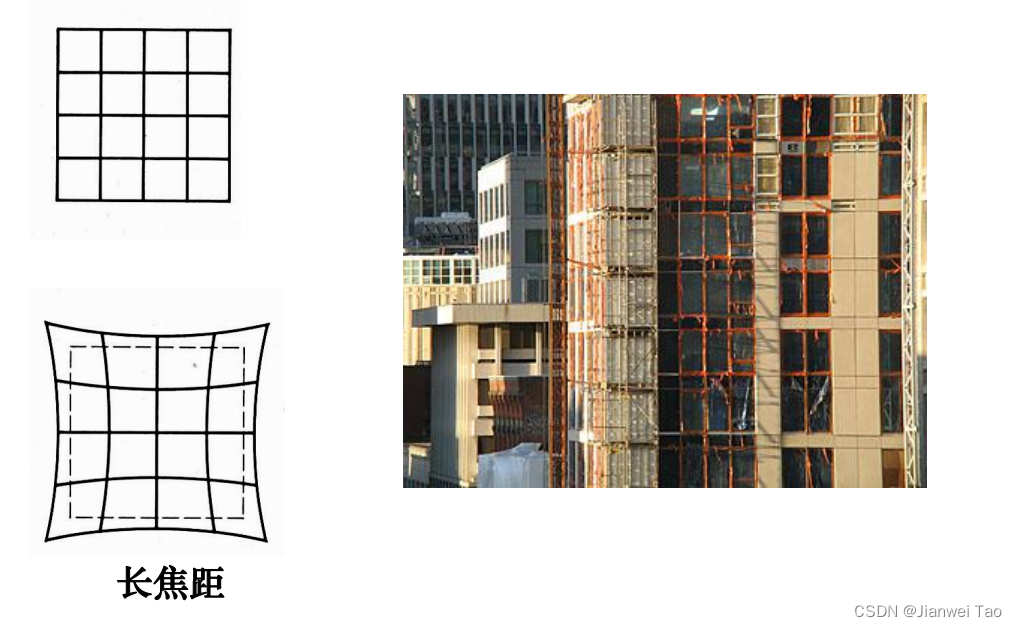
2.2.畸变现象:
图像径向畸变 :
–
透镜质量原因
–
光线在
远离
透镜中心的地方比靠近中心的地方更加弯曲
桶状畸变:
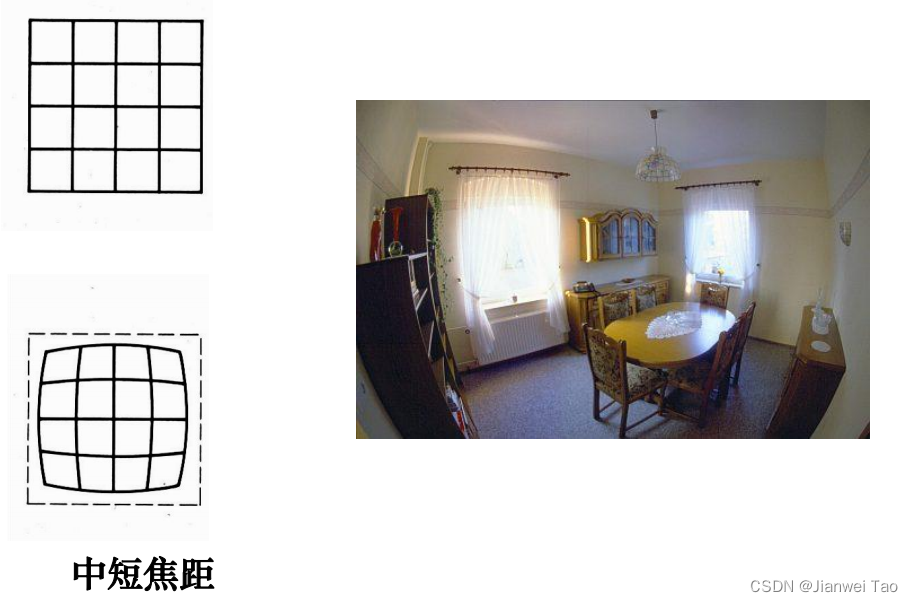
枕形畸变:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 259
259

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









