






这里写目录标题
ROS官网
安装:
可以参考这个博客,写的很好,有点小问题下面指出:
https://blog.csdn.net/qiqiqiqi0000/article/details/114888657
几个注意事项
1.安装源和密钥
前面的步骤:设置安装源和密钥的步骤可能需要查,因为密钥可能随着时间而改变,后面的代码可以参考上面的链接。
2.版本
根据不同ubuntu版本:
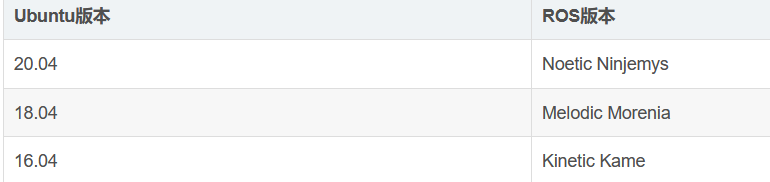
16.04
sudo apt-get install ros-Kinetic-desktop-full
18.04
sudo apt-get install ros-melodic-desktop-full
20.04
sudo apt-get install ros-Noetic-desktop-full
3.安装ROS时遇到E: 文件 list 第 1 行的记录格式有误 /etc/apt/sources.list.d/ros-latest.list (Component)解决办法
执行:
sudo rm /etc/apt/sources.list.d/ros-latest.list
4.执行sudo rosdep init时报错:
ERROR: Rosdep experienced an error: ('The read operation timed out',)
Please go to the rosdep page [1] and file a bug report with the stack trace below.
[1] : http://www.ros.org/wiki/rosdep
rosdep version: 0.21.0
...
先 sudo apt-get install python-rosdep ,再sudo rosdep init
5.设置文件中的问题
这里修改文件时,名字可能有问题,
sourceslist.py文件名是sources_list.py
sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/sources_list.py
修改:
DEFAULT_SOURCES_LIST_URL = 'file:///home/xxx/rosdistro/rosdep/sources.list.d/20-default.list'
sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/rep3.py
修改:
REP3_TARGETS_URL = 'file:///home/xxx/rosdistro/releases/targets.yaml'
__init.py文件名是__init__.py
sudo gedit /usr/lib/python2.7/dist-packages/rosdistro/__init__.py
修改
DEFAULT_INDEX_URL = 'file:///home/xxx/rosdistro/index-v4.yaml'
ip问题无法启动
https://blog.csdn.net/chenshazhou/article/details/112621165















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









