







You Only Look Once
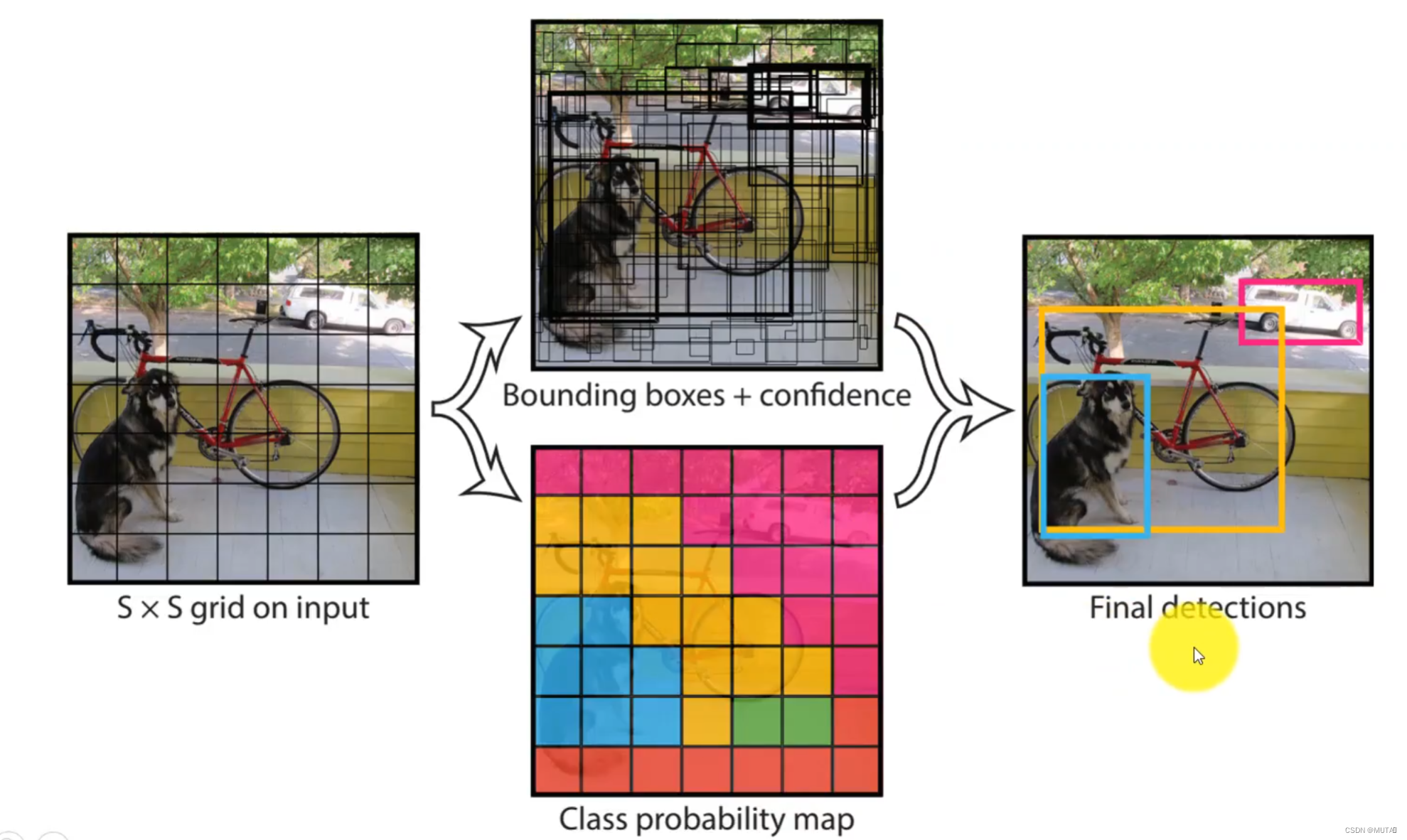
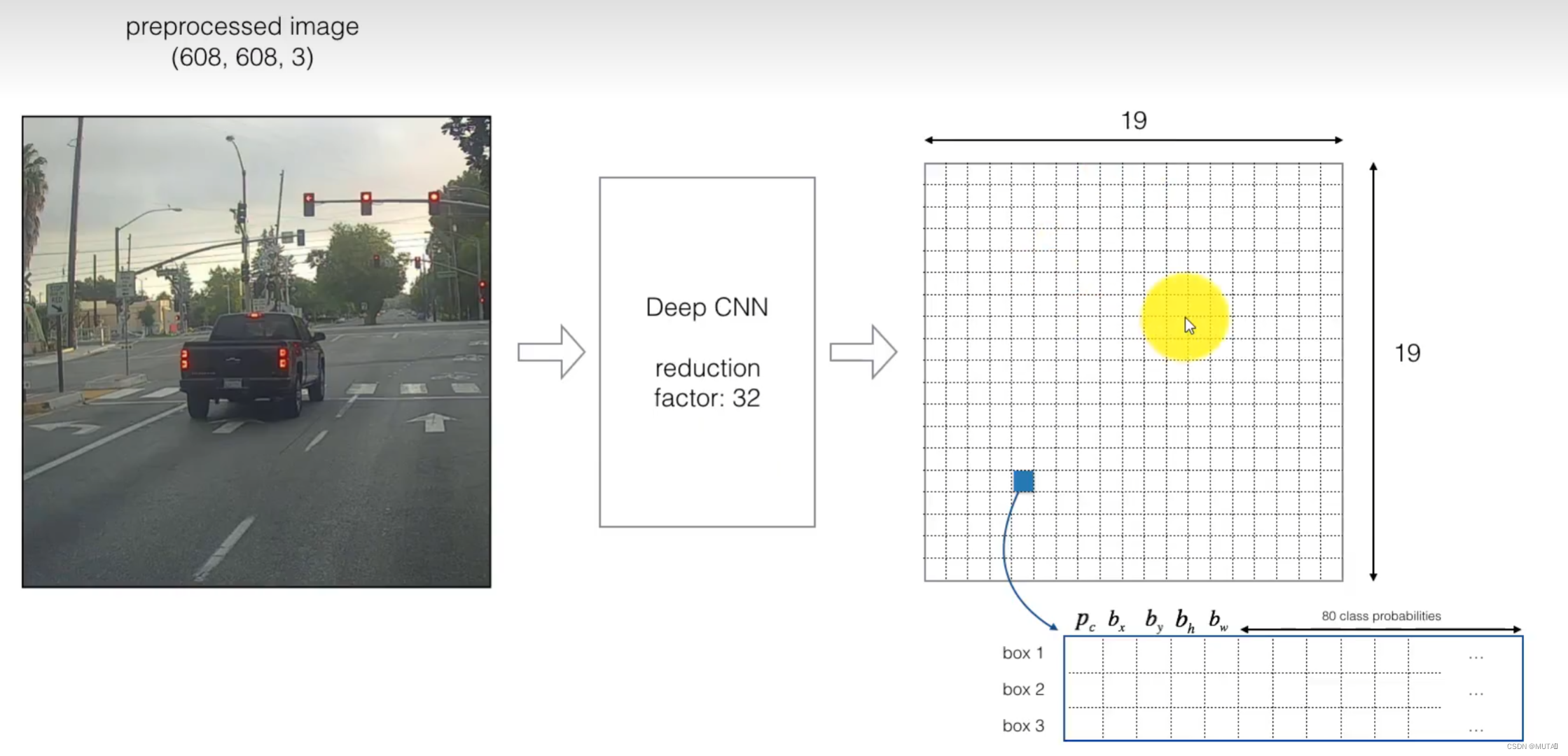
YOLO 将特征图划分为S×S的格子(grid cells),每个格子负责对落入其中的目标进行检测,一次性预测所有各自所含目标的边界框、定位置信度、以及所有类别概率向量。
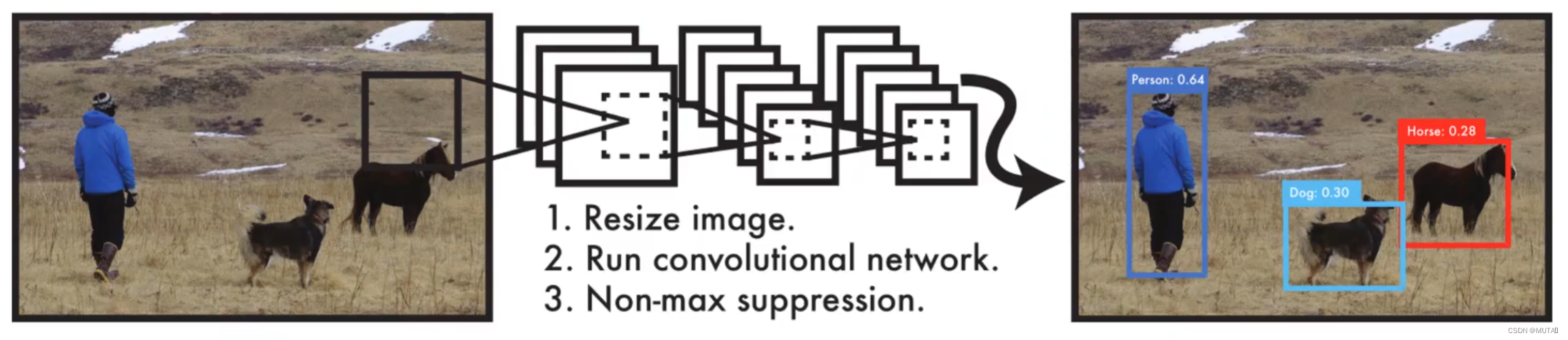
对图片进行缩放-->经过卷积网络-->非极大抑制(18条消息) 非最大抑制(NMS)_Yao-Blog的博客-CSDN博客
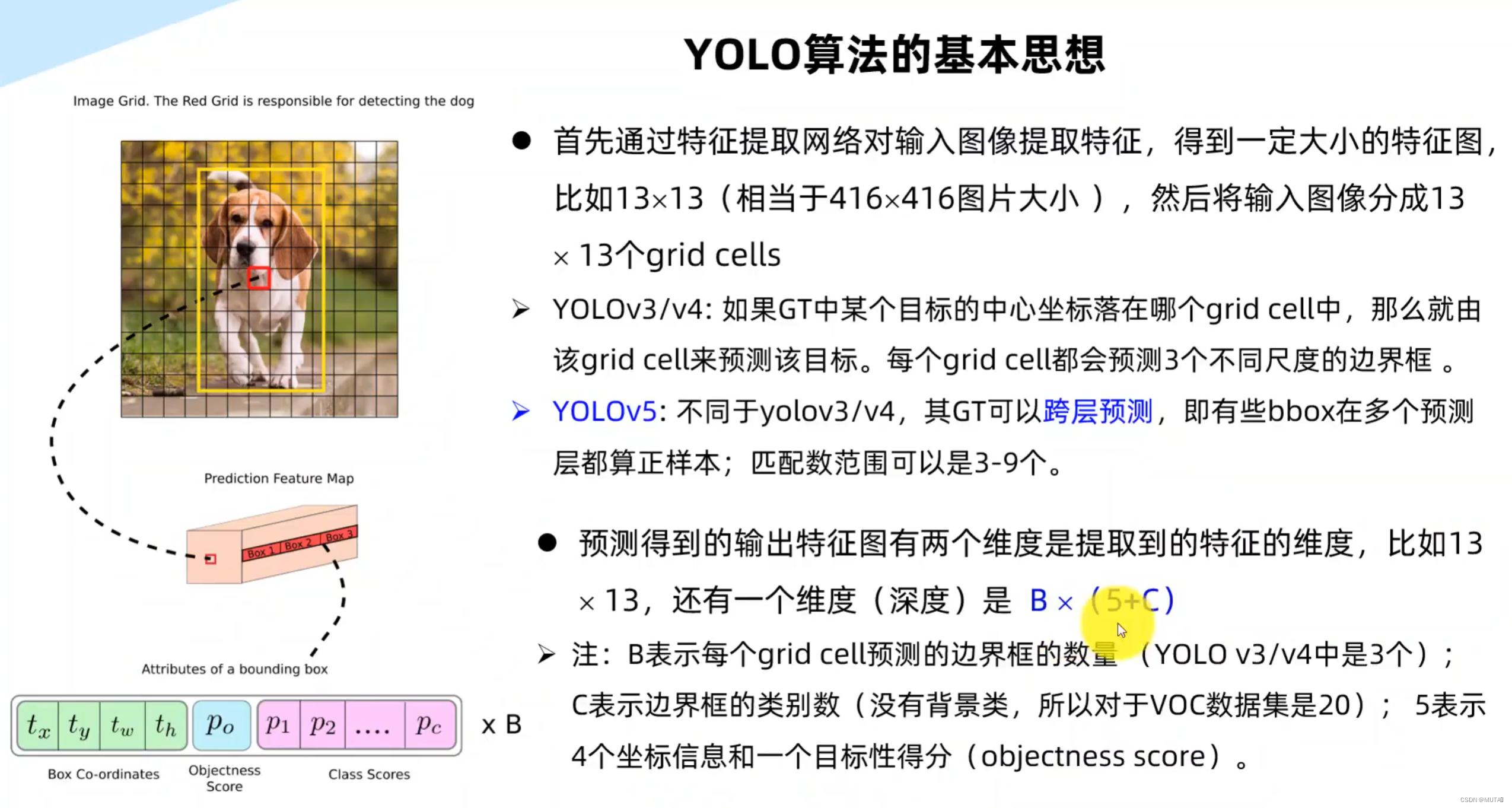
基本思想
经过卷积网络在特征图上划分S×S的网格,通过网格的划分得到边界框(bounding box)和置信度得分(confidence)以及类别的概率图(class probability map),结合两者得到最终检测结果
从图像的特征图出发,得到物体检测出的属性(attributes),即边界框的坐标(box co-ordinates)、目标性得分(objectness score)、分类的得分。
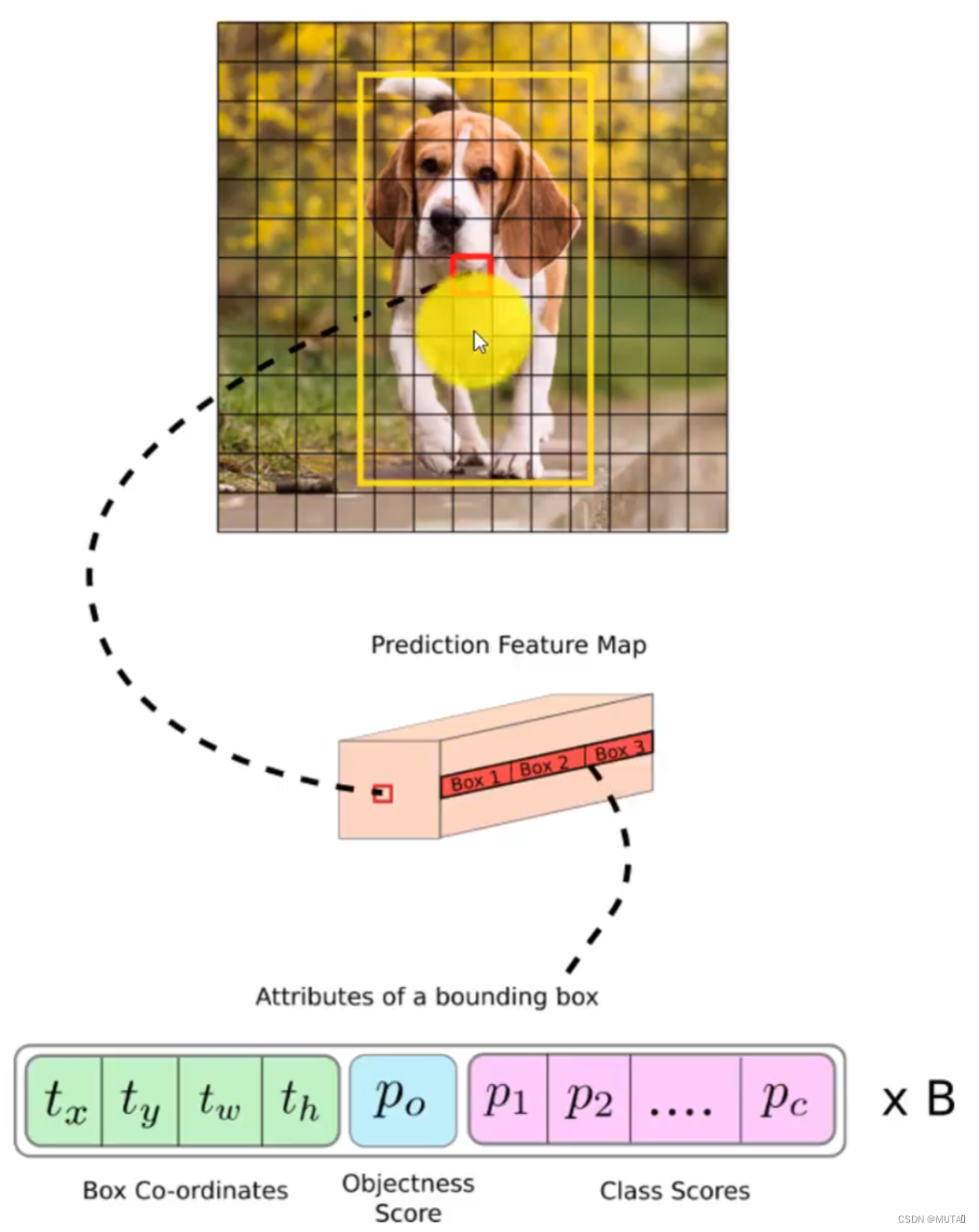
B表示有多少个边界框的预测。
多尺度融合
尺度划分越细,有助于小目标的检测
【目标检测】FPN(Feature Pyramid Network) - 知乎 (zhihu.com)
锚框(Anchor)机制
是一种先验框,我们预先设定一些边界框大小
每个预测框的类别置信度得分(class confidence score)计算如下:
class confidence score = box confidence score × conditional class probability
它测量分类和定位(目标对象所在的位置)的置信度。
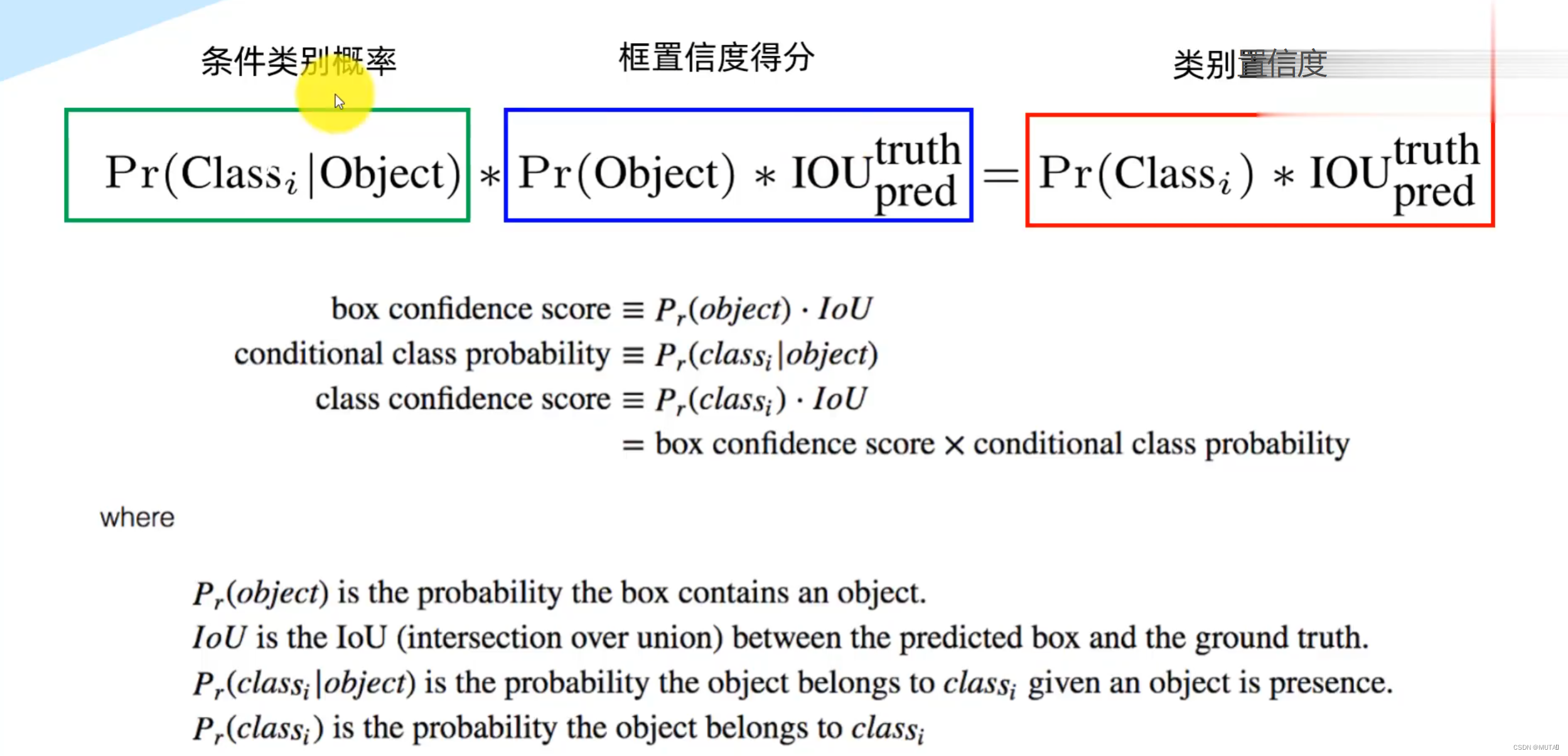
Pr(Object)框内有物体-->1,否则0
--->以有物体为条件,是哪一种类别的概率
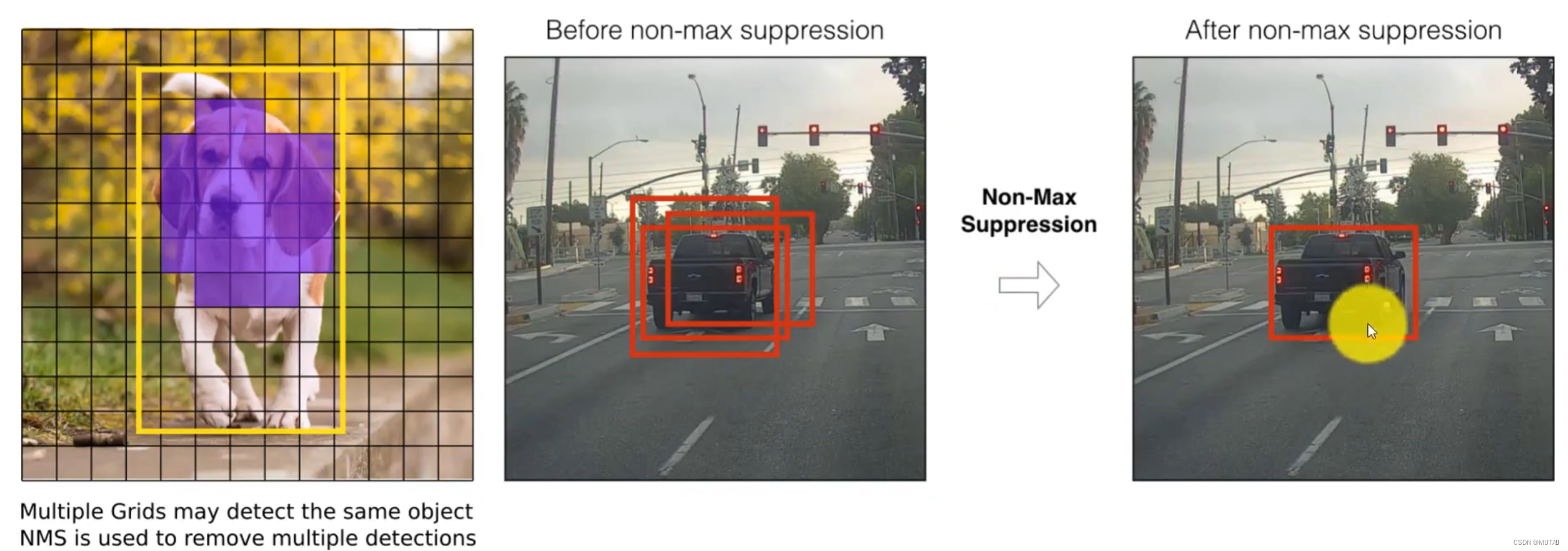
NMS(Non-Maximum Suppression)非极大抑制
可能会有多个格子检测到同样的物体,所以会有一些冗余的检测框,所以做一个后处理。
测试时没有GT框,只能比较多个预测框,比较相互之间的IoU,做NMS
(18条消息) 非最大抑制(NMS)_Yao-Blog的博客-CSDN博客
损失函数(Loss function)
损失函数包括:
classification loss,分类损失
localization loss, 定位损失(预测边界框与GT之间的误差)
confidence loss,置信度损失(框的目标性,objectness of the box)
总的损失函数:
classification loss+ localization loss + confidence loss
最适合新手入门的【YOLOV5目标实战】教程!基于Pytorch搭建YOLOV5目标检测平台!环境部署+项目实战(深度学习/计算机视觉)_哔哩哔哩_bilibili
















 4600
4600











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











