






1.引言
参考文章:Eigenstructure techniques for 2-D angle estimation with uniform circular arrays .https://ieeexplore.ieee.org/document/317861
梁国龙,田蕴琦,付进,等.基于均匀圆阵中心对称性的相干源方位估计[J].哈尔滨工程大学学报,2019,40(12):1958-1964.
均匀圆阵的阵列流形不具有Vandermonde结构性质,无法使用ULA阵列的一些DOA算法。本文学习虚拟阵变换法,通过模式空间变换将均匀圆阵转换为均匀线阵,其阵列流形转换成具有范德蒙结构。
2.UCA阵列结构
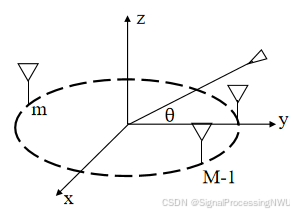
文章把入射信源与阵元看作在同一平面上,即俯仰角为0°,方位角。 UCA阵半径为R,阵元数M,窄带信号数N,快拍数为L。
第m个阵元与信源的夹角:
阵列导向矢量为:
t时刻第m个阵元的接收信号表达式为:

其中x为窄带信号,n为噪声。
3.模式空间变换
图源自参考论文
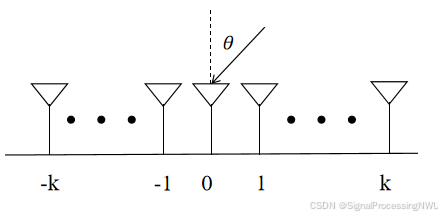
虚拟均匀线阵如图,d为阵元间距,虚拟线阵的输出信号Y(t)由原UCA接收信号经转换矩阵T相乘得到。
其中是经转换后的虚拟线阵导向矢量。
模式空间变换矩阵
F是离散傅里叶变换子矩阵,J是由k阶第1类贝塞尔构成的对角阵。
那么带代入上式,虚拟线阵阵列流形为:
转换后的虚拟线阵阵列流形具有范德蒙结构。
此时可以算出虚拟线阵输出信号Y(t)。
由文章推导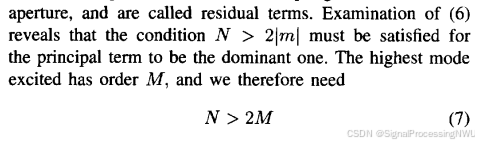
UCA可激励最大模式数 满足。
4.MATLAB仿真实验
实验加入了俯仰角估计,使用MUSIC算法进行虚拟线阵DOA估计。
clc;
clear all;
M=24;
c = 3*10^8;%光速
f = 3*10^9;%接受信号频率
lamda = c/f;%波长
theta=[22]*pi/180;
phi=[60]*pi/180;
P=length(theta);
kp=150;
% R=lamda*sin(pi-pi/2/M)/sin(2*pi/M)/2;
R = lamda/(4*sin(pi/M));%不模糊最大阵列半径
%R=lamda*2/1;
beita=2*pi*R/lamda;
% N=floor(beita);
N=floor(M/2-1);
PN=2*N+1;
dtheta = 0.01; % 方位角搜索步长
dphi = 0.01; % 俯仰角搜索步长
%%%%%%%%%%%%%%%%%%%%生成预处理矩阵
% for in=1:PN
% for ip=1:P
% Aba(in,ip)=exp(i*(in-N-1)*theta(ip))*sin(phi(ip));
% end
% end
fain=2*pi*[0:M-1]/M;
for ia=1:P
for ifai=1:M
a_r(ifai,ia)=exp(i*beita*cos(theta(ia)-fain(ifai))*sin(phi(ia)));
%a_r(ifai,ia)=exp(i*beita*cos(theta(ia)-fain(ifai)));
end
end
m=-N:N;
D=diag(i.^m.*besselj(m,beita));
for fi=1:PN
for mi=1:M
F(mi,fi)=exp(-i*2*pi*(fi-N-1)*(mi-1)/M);
end
end
T=pinv(D)*F'/M;%预处理矩阵
%shengcheng xinhao
fw=[0.01,0.05]*pi;
for is=1:1:P
for t=1:1:kp
if randn>0%%%%%%%%%%%%%产生不相干信号
S(is,t)=cos(fw(is)*t)*sin(phi(is));
else S(is,t)=-cos(fw(is)*t)*sin(phi(is));
end
%%%%%%%%%%%%产生相干信号
% S(is,t)=cos(fw(is)*t);
end
end
zn=1:PN;
P_noise=0.1;
noise=sqrt(P_noise/2)*(randn(M,kp)+i*randn(M,kp));
Av=T*a_r;
%y=T*a_r*S+T*noise; %预处理信号
y1=a_r*S+noise;
y=T*y1;
% MUSIC 算法估计方位角和俯仰角
Rxx = y * y' / kp;
% 特征值分解
[V,D] = eig(Rxx);
[lambda_sorted, index] = sort(diag(D), 'descend');
V_sorted = V(:, index);
U_S = V_sorted(:, 1:P);
U_N = V_sorted(:, P+1:end);
% MUSIC算法搜索角度
for k = 1:ceil(2*pi/dtheta)
theta1 = (k-1)*dtheta;
for m = 1:ceil(pi/(2*dphi))
phi1 = (m-1)*dphi;
for n = 1:M
phi_n = (2*pi*R/lamda)*cos(theta1 - fain(n))*sin(phi1);
a1(n) = exp(-1i*phi_n);
end
a=T*a1';
P_MUSIC(k,m) = 1/(a'*U_N*U_N'*a);
end
end
% 找到谱峰位置
[max_value, index] = max(P_MUSIC(:));
[index_theta, index_phi] = ind2sub(size(P_MUSIC), index);
theta_est = (index_theta-1)*dtheta*180/pi;
phi_est = (index_phi-1)*dphi*180/pi;
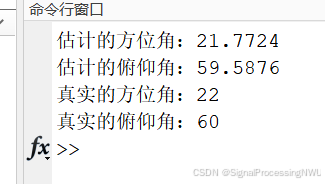
disp(['估计的方位角:', num2str(theta_est)]);
disp(['估计的俯仰角:', num2str(phi_est)]);
disp(['真实的方位角:', num2str(theta*180/pi)]);
disp(['真实的俯仰角:', num2str(phi*180/pi)]);估计结果
5.总结
文章只对基础的UCA模式变换为虚拟线阵算法进行仿真,参考文章对算法进行一些改进可以参考。

















 1039
1039

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









