







目录
第6章 圆盘振动
6.1 圆盘振动现象
轮盘的结构型式可分为中心轴联结(中心固定)的轮盘和外缘联结(边缘固定)的轮盘。
▶轮盘的振动形式可以分为:第一类振动:(节圆振动),这类振动一般不会导致轮盘的损坏;第二类振动:(节径振动),这类振动容易引起轮盘的损坏;复合振动。
(1)第一类振动—————振动形式中心对称,即全部节线都是同心圆。中心固定的一阶振动又称伞形振动。
对于外缘固定的圆盘,振动时没有中心节点,节圆情况类似。
节圆振动不严重,一般不会导致盘的损坏。
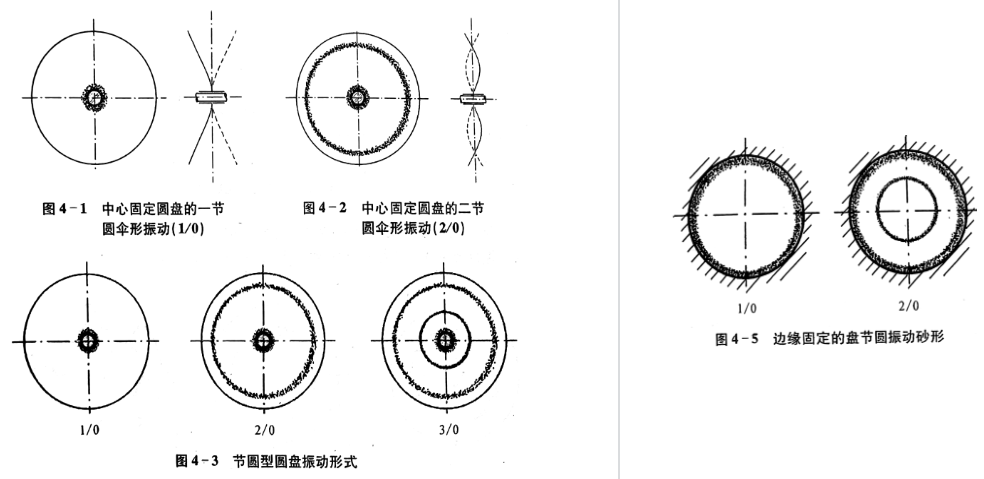
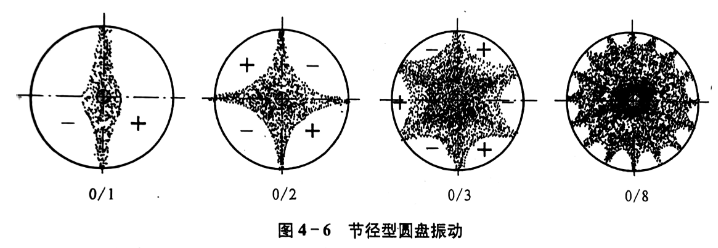
(2)第二类振动————全部节线都是沿圆盘面均匀分布的直径,称为节径。
这类振动无论在中心固定或边缘固装的圆盘都可能产生。这类振动最容易引起轮盘的损坏。
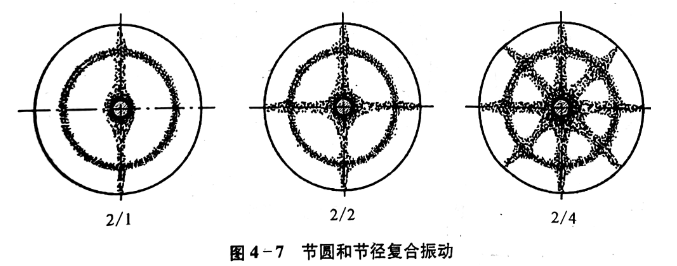
(3)复合振动
将各类振动编以标记符号。其中分子为节圆数,分母为节径数。
☛[选择题]判断下面轮盘的振动类型(C)
A、弯曲振动 B、节圆振动 C、节径振动 D、伞形振动

6.2 等厚圆盘的自振频率
圆盘的各种自振频率随其转速增加而增加。
高温使轮盘处理的弹性模量减小,从而导致轮盘的振动固有频率下降。
6.3 动波
第二类振动在实际发动机中最常见,下面详细分析这类振动。
与叶片振动类似,在求解盘的节径振动问题中,采用极坐标,写出振幅方程如下:
W
=
W
0
(
r
,
θ
)
cos
p
t
W=W_0\left( r,\theta \right) \cos pt
W=W0(r,θ)cospt
W
0
W_0
W0表示圆盘各位置的振幅,具体写为:
W
0
(
r
,
θ
)
=
U
(
r
)
cos
θ
W_0\left( r,\theta \right) =U\left( r \right) \cos \theta
W0(r,θ)=U(r)cosθ
U
(
r
)
U(r)
U(r)表示在一定半径
r
r
r的圆周上的最大振幅。
对于
m
m
m个节径的振动,则写为:
W
0
(
r
,
θ
)
=
U
(
r
)
cos
m
θ
W_0\left( r,\theta \right) =U\left( r \right) \cos m\theta
W0(r,θ)=U(r)cosmθ
因此,振幅方程可以写为:
W
=
U
(
r
)
cos
m
θ
cos
p
t
=
U
2
[
cos
(
m
θ
+
p
t
)
+
cos
(
m
θ
−
p
t
)
]
W=U\left( r \right) \cos m\theta \cos pt=\dfrac{U}{2}\left[ \cos \left( m\theta +pt \right) +\cos \left( m\theta -pt \right) \right]
W=U(r)cosmθcospt=2U[cos(mθ+pt)+cos(mθ−pt)]
上式
U
2
cos
(
m
θ
+
p
t
)
\dfrac{U}{2}\cos \left( m\theta +pt \right)
2Ucos(mθ+pt)和
U
2
cos
(
m
θ
−
p
t
)
\dfrac{U}{2}\cos \left( m\theta -pt \right)
2Ucos(mθ−pt)都被称为动波。
当位移为
0
0
0时,
cos
(
m
θ
±
p
t
)
=
0
\cos \left( m\theta \pm pt \right) =0
cos(mθ±pt)=0,解得节线相对于盘的运动方程为:
θ
=
i
π
2
m
±
p
m
t
\theta =\frac{i\pi}{2m}\pm \frac{p}{m}t
θ=2miπ±mpt
得到对应的角速度:
d
θ
d
t
=
±
p
m
\dfrac{d\theta}{dt}=\pm \dfrac{p}{m}
dtdθ=±mp
因此“动波”有下列特性:
①全圆周上任何时间都有
2
m
2m
2m个节点、极大值和极小值;
②这些节点(与其他点一起)随时间以一定角速度
±
p
m
\pm \dfrac{p}{m}
±mp在圆周上旋转;
③两个动波具有相同的角频率和幅值,但旋转方向相反。
当盘以 ω \omega ω的速度旋转时,如果动波移动方向与 ω \omega ω相同,称为顺动波;反之称为逆动波。
逆动波相对于地面的角速度
ω
2
\omega_2
ω2为:
ω
2
=
p
d
m
−
ω
\omega _2=\dfrac{p_d}{m}-\omega
ω2=mpd−ω(
p
d
p_d
pd是旋转情况下盘的自振频率,比静止盘要高)
可以看出,当
p
d
=
m
ω
p_d=m\omega
pd=mω时,
ω
2
=
0
\omega_2=0
ω2=0,于是得出如下结论:
▶(逆动波)的移动速度和盘的旋转速度相等,波形将在空间停止不动,称为(驻波)。
6.4 盘振动的激振力
引起盘振动的激振力大致有三种来源:
(1)叶片受到周期性变化的气体力传递给盘;
(2)其它零件的力通过联接环或轴传递给盘;
(3)盘面气体压力不均,或有周期性变化。
第7章 发动机的振动与平衡
7.1 临界转速
▶轴的挠度达到最大值时,这时轴的转速就称为(临界转速)。
平衡转子
假设一个弯曲平衡的轴盘系统,盘的重心与轴线重合,忽略轴的质量,并忽略盘重产生的静挠度。会有两种情况:
(1)不管什么转速下,盘的重心始终在旋转轴线上,轴不发生任何挠度。
(2)旋转时,轴发生挠度,只有在特定转速(临界转速)下,盘的离心力与轴的弹性恢复力平衡,此时轴可以产生任何挠度。
盘的离心力为: m y ω 2 my\omega^2 myω2 轴的弹性恢复力为: C y Cy Cy( C C C为刚性系数)
列出平衡方程: m y ω 2 = C y my\omega^2=Cy myω2=Cy ,解得临界转速为: ω c r = C m \omega _{cr}=\sqrt{\dfrac{C}{m}} ωcr=mC
综述:完全平衡的轴-盘系统除非在特定转速下,轴可以产生任何挠度外,其它情况下,轴都不会有挠度。(✔)
不平衡转子
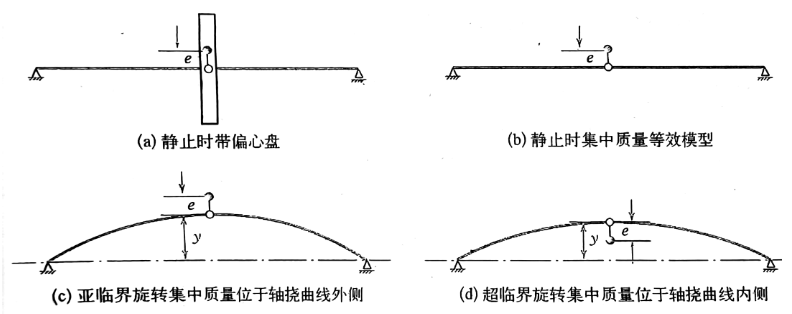
假设盘的重心与旋转轴不重合,带有一定的偏心距 e e e,盘装在跨度中央,此时无陀螺力矩。轴旋转时会有两种情况:
(一)亚临界状态
平衡方程为:
m
ω
2
(
y
+
e
)
=
C
y
m\omega ^2\left( y+e \right) =Cy
mω2(y+e)=Cy
解得挠度
y
y
y为:
y
=
e
C
m
ω
2
−
1
=
e
(
p
ω
)
2
−
1
=
(
ω
p
)
2
e
1
−
(
ω
p
)
2
=
(
ω
ω
c
r
)
2
e
1
−
(
ω
ω
c
r
)
2
y=\frac{e}{\dfrac{C}{m\omega ^2}-1}=\dfrac{e}{\left( \dfrac{p}{\omega} \right) ^2-1}=\frac{\left( \dfrac{\omega}{p} \right) ^2e}{1-\left( \dfrac{\omega}{p} \right) ^2}=\dfrac{\left( \dfrac{\omega}{\omega _{cr}} \right) ^2e}{1-\left( \dfrac{\omega}{\omega _{cr}} \right) ^2} \\
y=mω2C−1e=(ωp)2−1e=1−(pω)2(pω)2e=1−(ωcrω)2(ωcrω)2e
此时
ω
<
ω
c
r
\omega<\omega_{cr}
ω<ωcr,轮盘质心位于轴挠曲线的外侧。
(二)超临界状态
平衡方程为:
m
ω
2
(
y
−
e
)
=
C
y
m\omega ^2\left( y-e \right) =Cy
mω2(y−e)=Cy
解得挠度
y
y
y为:
y
=
e
1
−
C
m
ω
2
=
e
1
−
(
p
ω
)
2
=
(
ω
p
)
2
e
(
ω
p
)
2
−
1
=
(
ω
ω
c
r
)
2
e
(
ω
ω
c
r
)
2
−
1
y=\frac{e}{1-\dfrac{C}{m\omega ^2}}=\frac{e}{1-\left( \dfrac{p}{\omega} \right) ^2}=\frac{\left( \dfrac{\omega}{p} \right) ^2e}{\left( \dfrac{\omega}{p} \right) ^2-1}=\frac{\left( \dfrac{\omega}{\omega _{cr}} \right) ^2e}{\left( \dfrac{\omega}{\omega _{cr}} \right) ^2-1}
y=1−mω2Ce=1−(ωp)2e=(pω)2−1(pω)2e=(ωcrω)2−1(ωcrω)2e
此时
ω
>
ω
c
r
\omega>\omega_{cr}
ω>ωcr,轮盘质心位于轴挠曲线的内侧。

总结:
①在
ω
=
p
=
C
m
\omega =p=\sqrt{\dfrac{C}{m}}
ω=p=mC时,挠度
y
y
y将无限增大,远离此处,挠度明显减小。偏心距存在与否,并不影响临界转速;
②对于同一转子,平衡得越好,
e
e
e值越小,同一转速下,挠度呈比例下降,良好的平衡能减少振动;
③图中左右两支曲线并不对称,左支代表亚临界状态,右支代表超临界状态;
④当转子由亚临界越过临界过渡到超临界时,质心将由外侧转向内侧。
▶不平衡转子旋转时,在临界转速以下,处于(亚临界)状态;在临界转速以上,处于(超临界)状态。
偏心距的存在与否不影响转子临界转速的数值,因此,对转子的平衡并不能减少振动。(✘)
不完全平衡的轴-盘系统除非在特定的转速下,轴才有挠度。(✘)
当转子由亚临界越过临界而过渡到超临界时,质心将由挠曲线内侧转向外侧。(✘)
✈[例1]有单盘实心轴转子,尺寸如下图所示。设盘的偏心距为 3 × 1 0 − 5 m 3\times10^{-5}\mathrm{m} 3×10−5m,求 n = 2000 n=2000 n=2000和 3000 r p m 3000\mathrm{rpm} 3000rpm时,轴在装盘处的挠度。假设无摩擦和陀螺力矩。
由题目可知: E = 2.1 × 1 0 11 P a E=2.1\times10^{11}\mathrm{Pa} E=2.1×1011Pa, J = π d 4 / 64 = 3.976 × 1 0 − 8 m 4 J=\pi d^4/64=3.976\times10^{-8}\mathrm{m^4} J=πd4/64=3.976×10−8m4, m = 5 k g m=5\mathrm{kg} m=5kg, l = 1.2 m l=1.2\mathrm{m} l=1.2m, a = 0.4 / 1.2 = 1 / 3 a=0.4/1.2=1/3 a=0.4/1.2=1/3;
可算出轴在装盘处的刚性系数:
C = 3 E J a 2 ( 1 − a ) 2 l 3 = 2.935 × 1 0 5 N / m C=\frac{3EJ}{a^2\left( 1-a \right) ^2l^3}=2.935\times 10^5\mathrm{N}/\mathrm{m} C=a2(1−a)2l33EJ=2.935×105N/m
临界转速:
ω c r = C m = 242.3 r a d / s n c r = 60 ω c r 2 π = 2314 r p m \omega _{cr}=\sqrt{\frac{C}{m}}=242.3 \mathrm{rad}/\mathrm{s} \\ n_{cr}=\frac{60\omega _{cr}}{2\pi}=2314 \mathrm{rpm} ωcr=mC=242.3rad/sncr=2π60ωcr=2314rpm
当 n = 2000 r p m n=2000\mathrm{rpm} n=2000rpm时,盘处于亚临界状态
ω = 2 π n 60 = 209.4 r a d / s \omega =\frac{2\pi n}{60}=209.4\mathrm{rad}/\mathrm{s} ω=602πn=209.4rad/s
故盘处挠度为:
y = e ( ω ω c r ) 2 1 − ( ω ω c r ) 2 = 3 × 1 0 − 5 × ( 209.4 242.3 ) 2 1 − ( 209.4 242.3 ) 2 = 8.85174 × 1 0 − 5 m y=\frac{e\left( \dfrac{\omega}{\omega _{cr}} \right) ^2}{1-\left( \dfrac{\omega}{\omega _{cr}} \right) ^2}=\dfrac{3\times 10^{-5}\times \left( \dfrac{209.4}{242.3} \right) ^2}{1-\left( \dfrac{209.4}{242.3} \right) ^2}=8.85174\times 10^{-5}\mathrm{m} y=1−(ωcrω)2e(ωcrω)2=1−(242.3209.4)23×10−5×(242.3209.4)2=8.85174×10−5m
当 n = 3000 r p m n=3000\mathrm{rpm} n=3000rpm时,盘处于超临界状态
ω = 2 π n 60 = 314.2 r a d / s \omega =\frac{2\pi n}{60}=314.2\mathrm{rad}/\mathrm{s} ω=602πn=314.2rad/s
故盘处挠度为:
y = e ( ω ω c r ) 2 ( ω ω c r ) 2 − 1 = 3 × 1 0 − 5 × ( 314.2 242.3 ) 2 ( 314.2 242.3 ) 2 − 1 = 7.40184 × 1 0 − 5 m y=\frac{e\left( \dfrac{\omega}{\omega _{cr}} \right) ^2}{\left( \dfrac{\omega}{\omega _{cr}} \right) ^2-1}=\frac{3\times 10^{-5}\times \left( \dfrac{314.2}{242.3} \right) ^2}{\left( \dfrac{314.2}{242.3} \right) ^2-1}=7.40184\times 10^{-5}\mathrm{m} y=(ωcrω)2−1e(ωcrω)2=(242.3314.2)2−13×10−5×(242.3314.2)2=7.40184×10−5m

7.2 轴质量对临界转速的影响
先讨论光轴(不带盘)的临界转速,对轴上一微元段进行受力分析:

把离心力作为分布载荷,建立微分方程如下:
d
2
d
x
2
(
E
J
d
2
y
d
x
2
)
=
q
=
m
1
ω
2
y
\frac{d^2}{dx^2}\left( EJ\frac{d^2y}{dx^2} \right) =q=m_1\omega ^2y
dx2d2(EJdx2d2y)=q=m1ω2y
m
1
m_1
m1为单位长度的质量,对于等截面的均质轴,
E
J
EJ
EJ为常数,令
a
4
=
m
1
ω
2
E
J
a^4=\dfrac{m_1\omega ^2}{EJ}
a4=EJm1ω2,故得:
d
4
y
d
x
4
=
a
4
y
\frac{d^4y}{dx^4}=a^4y
dx4d4y=a4y
对于双简支梁,上述微分方程的特征方程为:
sin
a
l
=
0
\sin al=0
sinal=0
解得
(
a
l
)
i
=
i
π
,
i
=
1
,
2
,
3
⋯
(al)_i=i\pi,i=1,2,3\cdots
(al)i=iπ,i=1,2,3⋯故得一系列的临界转速值为:
ω
c
r
=
a
i
2
E
J
m
1
=
(
a
l
)
i
2
l
2
E
J
A
ρ
\omega _{cr}=a_{i}^{2}\sqrt{\frac{EJ}{m_1}}=\frac{\left( al \right) _{i}^{2}}{l^2}\sqrt{\frac{EJ}{A\rho}}
ωcr=ai2m1EJ=l2(al)i2AρEJ
因此前三阶转速:
ω
c
r
,
1
:
ω
c
r
,
2
:
ω
c
r
,
3
=
f
c
r
,
1
:
f
c
r
,
2
:
f
c
r
,
3
=
1
:
4
:
9
\omega _{cr,1}:\omega _{cr,2}:\omega _{cr,3}=f_{cr,1}:f_{cr,2}:f_{cr,3}=1:4:9
ωcr,1:ωcr,2:ωcr,3=fcr,1:fcr,2:fcr,3=1:4:9
现在讨论考虑轴质量的单盘转子的临界转速。设盘装在双简支轴的中央,且轴的临界转速与分布质量的光轴一样。
分布质量的光轴可以折合为中央带集中质量的
m
折
m_{折}
m折的无重轴,折合质量可由下式解出:
ω
c
r
,
1
=
C
m
折
=
π
2
l
2
E
J
A
ρ
\omega _{cr,1}=\sqrt{\frac{C}{m_{\text{折}}}}=\frac{\pi ^2}{l^2}\sqrt{\frac{EJ}{A\rho}}
ωcr,1=m折C=l2π2AρEJ
再考虑轴中央装有盘的情形:
ω
c
r
,
1
=
C
m
折
+
m
盘
\omega _{cr,1}=\sqrt{\frac{C}{m_{\text{折}}+m_{\text{盘}}}}
ωcr,1=m折+m盘C
经过变换可得顿克(Dunkerley)公式:
1
ω
2
=
1
ω
0
2
+
1
ω
1
2
{\color{red} \frac{1}{\omega ^2}=\frac{1}{\omega _{0}^{2}}+\frac{1}{\omega _{1}^{2}}}
ω21=ω021+ω121
此处
ω
\omega
ω(
=
ω
c
r
,
1
=\omega_{cr,1}
=ωcr,1)是该系统一阶临界转速,
ω
0
\omega_0
ω0、
ω
1
\omega_1
ω1分别为光轴和单盘无重轴的临界转速。
注意:①只能用于一阶临界转速;②不考虑陀螺力矩;③该公式是近似的,当盘位置接近支承时,误差较大;对于悬臂转子误差更大;④计算值低于精确值。
多盘转子的临界转速
对顿克公式进行推广,可得:
1
ω
c
r
2
=
1
ω
0
2
+
1
ω
1
2
+
1
ω
2
2
+
⋯
\frac{1}{\omega _{cr}^{2}}=\frac{1}{\omega _{0}^{2}}+\frac{1}{\omega _{1}^{2}}+\frac{1}{\omega _{2}^{2}}+\cdots
ωcr21=ω021+ω121+ω221+⋯
其中,
ω
c
r
\omega_{cr}
ωcr————考虑轴质量的多盘转子的一阶临界转速;
ω 0 \omega_{0} ω0————光轴的临界转速;
ω 1 \omega_{1} ω1————无重轴,只带盘1的系统临界转速;
ω 2 \omega_{2} ω2————无重轴,只带盘2的系统临界转速;
…
✈[例2]已知双支点等截面带盘的轴如下图所示,分别计算下列三种情况的临界转速:(1)光轴(不计盘质量);(2)单盘无重轴;(3)单盘计入轴质量。
已知:
E = 2.1 × 1 0 11 P a ρ = 7.8 × 1 0 3 k g / m 3 A = π d 2 / 4 = 7.069 × 1 0 − 4 m 2 J = π d 4 / 64 = 3.976 × 1 0 − 8 m 4 m = 5 k g l = 1.2 m a = 0.4 / 1.2 = 1 / 3 E=2.1\times 10^{11}\mathrm{Pa} \\ \rho =7.8\times 10^3\mathrm{kg}/\mathrm{m}^3 \\ A=\pi d^2/4=7.069\times10^{-4}\mathrm{m}^2 \\ J=\pi d^4/64=3.976\times 10^{-8}\mathrm{m}^4 \\ m=5\mathrm{kg} \\ l=1.2\mathrm{m} \\ a=0.4/1.2=1/3 E=2.1×1011Paρ=7.8×103kg/m3A=πd2/4=7.069×10−4m2J=πd4/64=3.976×10−8m4m=5kgl=1.2ma=0.4/1.2=1/3
(1)光轴:
ω c r ′ = π 2 l 2 E J A ρ = 266.7 r a d / s n c r ′ = 60 ω c r ′ 2 π = 2547 r p m \omega _{cr}^{\prime}=\frac{\pi ^2}{l^2}\sqrt{\frac{EJ}{A\rho}}=266.7\mathrm{rad}/\mathrm{s} \\ n_{cr}^{\prime}=\frac{60\omega _{cr}^{\prime}}{2\pi}=2547\mathrm{rpm} ωcr′=l2π2AρEJ=266.7rad/sncr′=2π60ωcr′=2547rpm
(2)单盘无重轴:轴在装盘处的刚性系数:
C = 3 E J a 2 ( 1 − a ) 2 l 3 = 2.935 × 1 0 5 N / m C=\frac{3EJ}{a^2\left( 1-a \right) ^2l^3}=2.935\times 10^5\mathrm{N}/\mathrm{m} C=a2(1−a)2l33EJ=2.935×105N/m
临界转速:
ω c r ′ ′ = C m = 242.3 r a d / s n c r ′ ′ = 60 ω c r 2 π = 2314 r p m \omega _{cr}^{''}=\sqrt{\frac{C}{m}}=242.3 \mathrm{rad}/\mathrm{s} \\ n_{cr}^{''}=\frac{60\omega _{cr}}{2\pi}=2314 \mathrm{rpm} ωcr′′=mC=242.3rad/sncr′′=2π60ωcr=2314rpm
(3)单盘计轴质量:根据顿克公式:
1 ω c r 2 = 1 ( ω c r ′ ) 2 + 1 ( ω c r ′ ′ ) 2 ω c r = 179.3 r a d / s n c r = 60 ω c r 2 π = 1712 r p m \frac{1}{\omega _{cr}^{2}}=\frac{1}{\left( \omega _{cr}^{\prime} \right) ^2}+\frac{1}{\left( \omega _{cr}^{''} \right) ^2} \\ \omega _{cr}=179.3\mathrm{rad}/\mathrm{s} \\ n_{cr}=\frac{60\omega _{cr}}{2\pi}=1712\mathrm{rpm} ωcr21=(ωcr′)21+(ωcr′′)21ωcr=179.3rad/sncr=2π60ωcr=1712rpm
7.3 处理临界转速问题的方法
(1)将转子的临界转速调到发动机的最大转速以上
一般认为临界转速应高于最大工作转速的 30 % 30\% 30%,就可以避开大的振动。
(2)将转子的临界转速调到发动机的最低转速以下
(3)增加阻尼器或挠度阻尼器
▶对轴的挠度起到抑制效果最常用而有效的是(挤压油膜)阻尼器
(4)利用非线性的作用
(5)改善转子的平衡
7.4 发动机转子的平衡
▶发动机转子不平衡的表现形式有:(静不平衡)和(动不平衡)两种。
转子外径D与其长度L满足D/L<5时,不论其工作转速高低都只需进行静平衡。(✘)[D/L>5,需静平衡]















 804
804











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









