







目录
第1章 工作叶片的强度计算
选择题
☛叶片截面上总应力最大的点,就是(D)最大的点。
A、扭转应力 B、振动应力 C、离心拉伸应力 D、弯曲应力
☛以下哪项不是静强度计算的内容(D)
A、变形计算 B、应力计算 C、强度考核 D、频率计算
判断题
发动机越小,叶片离心力影响越严重。(✔)
离心力弯矩随飞行状态有很大的变化。(✘)
叶片截面上弯曲应力认为是均匀分布的。(✘)[非均匀分布]
叶片每单位叶高上都受到一个轴向气体力和一个径向气体力的作用。(✘)[轴向和周向]
对于小弦长的叶片,扭转应力的影响不可忽略。(✘)
蠕滑是指零件内的应力随时间而逐渐减小的现象。(✘)
填空题
1.叶片工作时受到的负荷包括:(离心力)、(气体力)、(热应力)和(振动应力)。
2.把叶片的离心力与其自重之比称为(过载系数)。
3.叶片在离心力作用下,会产生(拉伸)应力、(扭转)应力和(弯曲)应力。
4.计算工作叶片上的应力时,通常不计叶片上的扭转应力、(热)应力和(振动)应力。
5.把工作叶片看为根部完全固装的变截面(悬臂杆)。
6.进行发动机工作叶片的强度计算时,只需要选取叶片可能出现危险的若干工作状态进行计算,这些状态包括:(设计状态)、(低空低温高速飞行状态)、(高空低速飞行状态)和(最高温度状态)。
7.对于等截面叶片,截面所在的半径越小,则该截面上的离心拉伸应力就越(大)。
8.近似估算法计算叶片气体力时,假设气体力沿叶高是不变的,都等于(平均半径)处的数值。
9.气流受到轴向力的作用,一方面是因为(轴向)速度发生变化,还有个原因就是由于轴向压差。
10.当工作叶片各截面的重心联线不与Z轴重合,旋转时叶片所产生的离心力将产生(离心力弯矩)。
11.设计叶片时,通常设法使(离心)弯矩和(气动)弯矩尽可能相抵消。
12.作用在工作叶片各截面上的总弯矩等于作用在叶片各截面上的(气体力)弯矩和(离心力)弯矩的代数和。
13.叶片重心偏移的方向总是与叶片所受总的(气体力)方向一致。
14.在工作叶片的静强度计算中,叶片截面上的总应力就是(离心拉伸应力)和(弯曲应力)的代数和。
15.叶片的安全系数是叶片材料的(许用应力)与危险截面上(最大总应力)之比。
16.对于工作温度较高的叶片,许用应力为叶片材料的(高温持久强度极限)。
17.物体受热膨胀受到约束时,会产生(压)(压/拉)应力。
18.发动机起动时,涡轮叶片叶片表面和较薄的排气边部分受到的热应力为(压)(压/拉)应力。
19.(蠕滑)是指零件的变形随时间而逐渐增加的现象。
20.松弛是指零件内的(应力)随时间而逐渐减小的现象。
21.热应力对工作叶片(尤其是涡轮叶片)的强度有很大影响。一方面由于叶片材料的(机械性能)将降低;另一方面叶片上某些部位的(总应力)增大,这将使叶片的安全裕度明显下降。
简答题(预测)
1.计算工作叶片上的应力时,通常作出哪些假设?
(1)计算工作叶片上的应力时,通常不计叶片上的扭转应力、热应力和振动应力;
(2)把工作叶片看为根部完全固装的变截面悬臂杆。
2.进行发动机工作叶片的强度计算时,只需要选取叶片可能出现危险的若干工作状态进行计算,这些状态包括?
(1)设计状态:
H
=
0
,
V
=
0
,
n
=
n
max
H=0,V=0,n=n_{\max}
H=0,V=0,n=nmax,此时转速最高,气动参数最全。
(2)低空低温高速飞行状态:
H
=
0
,
V
=
V
max
H=0,V=V_{\max}
H=0,V=Vmax,发动机转速最大时,叶片承受的气动力最大。
(3)高空低速飞行状态:
H
=
H
max
,
V
=
V
H
,
n
=
n
max
,
t
=
t
H
H=H_{\max},V=V_H,n=n_{\max},t=t_H
H=Hmax,V=VH,n=nmax,t=tH,
V
H
V_H
VH为设计高度下的最低飞行速度,此时气动力最小。
(4)最高温度状态:叶片所受载荷不是最大,但温度高,材料的机械性能将降低,需要计算该状态下的强度。
3.影响叶片强度的因素
(1)扭转应力的影响;(2)热应力的影响;(3)扭向的影响;(4)蠕变的影响;(5)叶片弯曲变形;(6)榫头、叶冠和凸台的影响。
计算题(预测)
✈[例1]离心拉伸应力的一般公式
叶片在自身质量的离心力作用下,将产生拉伸应力。
假设同一截面上的离心拉伸应力处处相等。工作叶片任一横截面上的离心拉伸应力等于该截面以上部分叶片质量所产生的沿
Z
Z
Z轴方向的离心力与该截面面积之比。
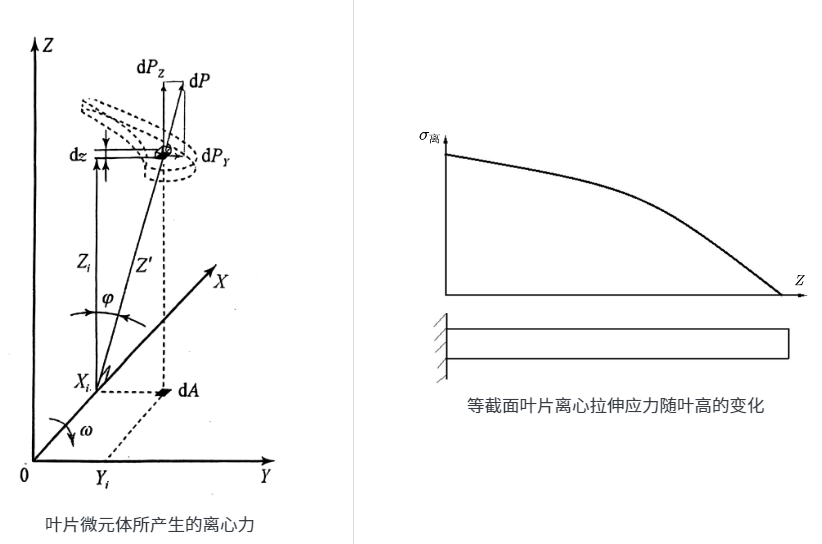
微元体所受离心力
d
P
dP
dP为:
d
P
=
ρ
ω
2
Z
′
d
A
d
Z
dP=\rho \omega ^2Z^{\prime}dAdZ
dP=ρω2Z′dAdZ
其中,
d
A
=
d
x
d
y
dA=dxdy
dA=dxdy,注意到
Z
=
Z
′
cos
φ
Z=Z^{\prime}\cos \varphi
Z=Z′cosφ,离心力
d
P
dP
dP沿
Z
Z
Z轴方向的分量为:
d
P
Z
=
d
P
cos
φ
=
ρ
ω
2
Z
d
A
d
Z
dP_Z=dP\cos \varphi =\rho \omega ^2ZdAdZ
dPZ=dPcosφ=ρω2ZdAdZ
截面积为
A
(
Z
)
A(Z)
A(Z)的叶片微元段质量产生的
Z
Z
Z轴方向的离心力分量为:
∫
A
(
Z
)
d
P
Z
=
ρ
ω
2
Z
d
Z
∫
A
(
Z
)
d
A
=
ρ
ω
2
Z
A
(
Z
)
d
Z
\int_{A\left( Z \right)}{dP_Z=}\rho \omega ^2ZdZ\int_{A\left( Z \right)}{dA=}\rho \omega ^2ZA\left( Z \right) dZ
∫A(Z)dPZ=ρω2ZdZ∫A(Z)dA=ρω2ZA(Z)dZ
工作叶片某一截面
(
Z
=
Z
i
)
(Z=Z_i)
(Z=Zi)以上部分叶片质量产生的沿
Z
Z
Z轴方向的离心力为:
P
i
(
离
)
=
ρ
ω
2
∫
Z
i
Z
k
Z
A
(
Z
)
d
Z
P_{i\left( \text{离} \right)}=\rho \omega ^2\int_{Z_i}^{Z_k}{ZA\left( Z \right) dZ}
Pi(离)=ρω2∫ZiZkZA(Z)dZ
Z
k
Z_k
Zk为叶尖处的
Z
Z
Z坐标值,根据定义,工作叶片某一截面
(
Z
=
Z
i
)
(Z=Z_i)
(Z=Zi)的离心拉伸应力为:
σ
i
(
离
)
=
ρ
ω
2
∫
Z
i
Z
k
Z
A
(
Z
)
d
Z
A
(
Z
)
\sigma _{i\left( \text{离} \right)}=\frac{\rho \omega ^2 \displaystyle\int_{Z_i}^{Z_k}{ZA\left( Z \right) dZ}}{A\left( Z \right)}
σi(离)=A(Z)ρω2∫ZiZkZA(Z)dZ
对于等截面叶片,
A
(
Z
)
=
A
(
Z
i
)
=
c
o
n
s
t
A(Z)=A(Z_i)=const
A(Z)=A(Zi)=const,离心拉伸应力公式可变为:
σ
i
(
离
)
=
1
2
ρ
ω
2
(
Z
k
2
−
Z
i
2
)
\sigma _{i\left( \text{离} \right)}=\frac{1}{2}\rho \omega ^2\left( Z_{k}^{2}-Z_{i}^{2} \right)
σi(离)=21ρω2(Zk2−Zi2)
✈[例2]弯曲应力的计算公式
气体力弯矩

气体力
p
x
,
p
y
p_x,p_y
px,py正负与
x
,
y
x,y
x,y轴正负方向一致,根据右手定则,正的
p
x
p_x
px产生
y
y
y轴方向负的弯矩,正的
p
y
p_y
py产生
x
x
x轴方向正的弯矩。因此任一半径
Z
Z
Z处叶片截面上的气体力弯矩为:
M
x
(
Z
)
气
=
1
2
p
y
(
Z
k
−
Z
)
2
M
y
(
Z
)
气
=
−
1
2
p
x
(
Z
k
−
Z
)
2
\begin{align} M_x\left( Z \right) _{\text{气}}&=\frac{1}{2}p_y\left( Z_k-Z \right) ^2\notag \\ M_y\left( Z \right) _{\text{气}}&=-\frac{1}{2}p_x\left( Z_k-Z \right) ^2\notag \end{align}
Mx(Z)气My(Z)气=21py(Zk−Z)2=−21px(Zk−Z)2
计算弯曲应力时,总是对惯性主轴
η
,
ξ
\eta ,\xi
η,ξ而言的,需要把对
x
,
y
x,y
x,y轴的合成弯矩转换为对
η
,
ξ
\eta ,\xi
η,ξ轴的合成弯矩。
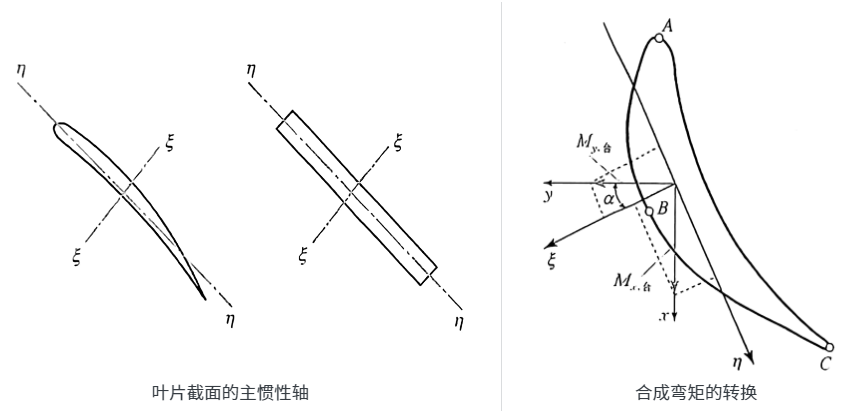
转换公式如下:
{
M
η
,
合
=
M
x
,
合
cos
α
−
M
y
,
合
sin
α
M
ξ
,
合
=
M
x
,
合
sin
α
+
M
y
,
合
cos
α
\begin{cases} M_{\eta ,\text{合}}=M_{x,\text{合}}\cos \alpha -M_{y,\text{合}}\sin \alpha\\ M_{\xi ,\text{合}}=M_{x,\text{合}}\sin \alpha +M_{y,\text{合}}\cos \alpha\\ \end{cases}
{Mη,合=Mx,合cosα−My,合sinαMξ,合=Mx,合sinα+My,合cosα
根据材料力学公式
σ
i
(
弯
)
=
M
y
J
\sigma _{i\left( \text{弯} \right)}=\dfrac{My}{J}
σi(弯)=JMy计算该点弯曲应力,将
J
J
J换为对应的
J
η
,
J
ξ
J_{\eta},J_{\xi}
Jη,Jξ,
y
y
y换为
(
η
,
ξ
)
(\eta,\xi)
(η,ξ)即可。
校核强度只需计算该截面弯曲应力最大处,在距
η
\eta
η轴最远的
A
,
B
,
C
A,B,C
A,B,C三点在仅有
M
η
,
合
M_{\eta ,\text{合}}
Mη,合作用时,显然弯曲应力最大,当同时有
M
ξ
,
合
M_{\xi ,\text{合}}
Mξ,合时,这个结论也近似正确。根据叠加原理,这三点的弯曲应力计算式为:
{
σ
A
,
弯
=
M
ξ
,
合
J
ξ
η
A
−
M
η
,
合
J
η
ξ
A
σ
B
,
弯
=
M
ξ
,
合
J
ξ
η
B
−
M
η
,
合
J
η
ξ
B
σ
C
,
弯
=
M
ξ
,
合
J
ξ
η
C
−
M
η
,
合
J
η
ξ
C
\begin{cases} \sigma _{A,\text{弯}}=\dfrac{M_{\xi ,\text{合}}}{J_{\xi}}\eta _A-\dfrac{M_{\eta ,\text{合}}}{J_{\eta}}\xi _A\\ \sigma _{B,\text{弯}}=\dfrac{M_{\xi ,\text{合}}}{J_{\xi}}\eta _B-\dfrac{M_{\eta ,\text{合}}}{J_{\eta}}\xi _B\\ \sigma _{C,\text{弯}}=\dfrac{M_{\xi ,\text{合}}}{J_{\xi}}\eta _C-\dfrac{M_{\eta ,\text{合}}}{J_{\eta}}\xi _C\\ \end{cases}
⎩
⎨
⎧σA,弯=JξMξ,合ηA−JηMη,合ξAσB,弯=JξMξ,合ηB−JηMη,合ξBσC,弯=JξMξ,合ηC−JηMη,合ξC
式中的负号是为了使所得应力与应力符号的规定一致。
第2章 轮盘的强度计算
选择题
☛对于轮盘常规强度计算,有时须考虑的是(D)。
A、气体力 B、陀螺力矩 C、振动负荷 D、装配应力
☛关于轮盘工作条件,下列各项错误的是:(D)。
A、 压气机盘所受的热负荷一般可忽略(随着发动机总压比和飞行速度的提高,压气机出口的温度已经很高,所以压气机末几级轮盘的热负荷有时不可忽略)
B、 热负荷对涡轮盘的影响严重(涡轮盘温差明显,尤其是非稳态下,热负荷很复杂,难以计算,常规计算仅考虑稳态下的热负荷)
C、 相对离心力和热负荷,振动负荷对轮盘影响较小
D、 常规计算中,有时须考虑陀螺力矩
☛以下发动机部件破坏情况中最严重的是(B)。
A、叶片叶根折断 B、盘中心裂纹 C、轮缘榫头部分断裂 D、盘缘径向裂纹
☛轮盘强度计算中,需要满足的基本假设包括:(D)
A、 轴对称假设 B、 弹性假设 C、 平面应力假设 D、 ABC全是
☛等温实心等厚盘中应力分布为
σ
r
=
3
+
ν
8
A
(
r
a
2
−
r
2
)
+
σ
a
σ
θ
=
A
8
[
(
3
+
ν
)
r
a
2
−
(
1
+
3
ν
)
r
2
]
+
σ
a
\begin{align} \sigma _r&=\frac{3+\nu}{8}A\left( r_{a}^{2}-r^2 \right) +\sigma _a\notag \\ \sigma _{\theta}&=\frac{A}{8}\left[ \left( 3+\nu \right) r_{a}^{2}-\left( 1+3\nu \right) r^2 \right] +\sigma _a\notag \end{align}
σrσθ=83+νA(ra2−r2)+σa=8A[(3+ν)ra2−(1+3ν)r2]+σa
由上式可知,下列各项正确的是:(C)
A、均匀加热,盘的径向应力和周向应力增加。
B、盘缘外载值一定时,盘身应力与厚度有关。
C、盘身应力与材料密度
ρ
\rho
ρ成正比。 [
A
=
ρ
ω
2
∝
ρ
,
σ
a
∝
ρ
A=\rho \omega ^2\propto \rho ,\sigma _a\propto \rho
A=ρω2∝ρ,σa∝ρ]
D、如果弹性系数沿径向不变,则应力与弹性系数成正比。
☛轮盘强度计算时,假设盘的温度沿(B)方向变化。
A、 周向 B、 径向 C、 厚度 D、 周向和径向
☛对于等厚盘热应力的分布规律,以下描述正确的是:(B)
A、如果温度沿周向变化规律是线性时,实心盘的热应力是按线性变化的
B、如果温度沿径向变化规律是线性时,实心盘的热应力是按线性变化的
C、如果温度沿周向变化规律是线性时,空心盘的热应力是按线性变化的
D、如果温度沿径向变化规律是线性时,空心盘的热应力是按线性变化的
☛非均匀加热静止盘的热应力分布为:
σ
r
=
α
E
r
a
2
∫
0
r
a
t
r
d
r
−
α
E
r
2
∫
0
r
t
r
d
r
σ
θ
=
α
E
r
a
2
∫
0
r
a
t
r
d
r
+
α
E
r
2
∫
0
r
t
r
d
r
−
E
α
t
\begin{align} \sigma _r&=\frac{\alpha E}{r_{a}^{2}}\int_0^{r_a}{trdr}-\frac{\alpha E}{r^2}\int_0^r{trdr} \notag \\ \sigma _{\theta}&=\frac{\alpha E}{r_{a}^{2}}\int_0^{r_a}{trdr}+\frac{\alpha E}{r^2}\int_0^r{trdr}-E\alpha t \notag \end{align}%\tag{2-14}
σrσθ=ra2αE∫0ratrdr−r2αE∫0rtrdr=ra2αE∫0ratrdr+r2αE∫0rtrdr−Eαt
由上式可知,下列各项错误的是:(C)(2分)
A、在全盘上均匀加热,不会导致热应力
B、沿半径温升成比例地增大
K
K
K倍时,热应力也增大
K
K
K倍
C、弹性系数增大
K
K
K倍时,热应力不变 [热应力也增大
K
K
K倍 ]
D、热应力分布规律与温度分布规律有关
☛下列选项中,材料利用最合理的是:(C)
A、 等厚盘 B、 锥形盘 C、 等强度盘 D、 静止盘
判断题
轮盘强度计算时,暂不考虑材料的塑性变形。(✔)
强度计算时,假设盘处于平面应力状态。(✔)
轮盘强度计算时,假设应力沿盘的厚度均匀分布。(✔)
盘强度计算时,假设盘的温度沿厚度方向变化。(✘)
轮盘应力计算符合力的叠加原理。(✔)
在全盘上均匀加热,不会导致热应力。(✔)
等厚盘应力分布不均匀,盘心处应力最低。(✘)
等厚度盘的应力分布是均匀的,材料利用最充分。(✘)
将空心盘孔边局部的材料削去部分,可以避免过大的应力。(✘)
等厚盘应力分布不均匀,盘心处应力最低。(✘)
温度沿径向变化规律是线性时,盘身的热应力也是按线性规律变化的。(✘)[实心盘]
对于实心盘而言,锥形盘的应力比等厚盘更合理,相同条件下,重量更轻些。(✔)
全盘上温度一致的情况下,盘就达到了完全的等强度。(✘)
填空题
22.轮盘强度计算中主要考虑两种负荷:安装在轮缘上的叶片质量以及轮盘本身的(离心力)和沿盘半径及厚度方向受热不均所引起的(热负荷)。
23.除离心力和热负荷外,轮盘还受到气体力、陀螺力矩、(振动负荷)、(装配应力)等。
24.盘与轴的过盈配合,将在盘孔处产生(装配)应力。
25.常规计算中,按照轮盘处于(弹性)(弹性/塑性/弹塑性)状态进行分析。
26.由于盘在超温下工作,导致盘身(蠕变),甚至局部颈缩,使盘外径(增大),最后导致盘破裂。
27.轮盘计算时,可以作轴对称的假设,并可进一步假设盘处于(平面应力)状态。对于轮盘各环形截面上只有(径向)应力,在通过旋转中心的径向截面上只有(周向应力)。
28.盘缘应力是指由叶片质量及盘缘榫槽凸块(离心力)所引起的、在盘缘处均布的(径向)(径向/周向)应力。
29.开孔会对轮盘应力有影响,对于等厚盘来说,即使孔无限小,盘心处的周向应力还是实心盘中心应力的(2)倍。
30.温度沿径向变化规律是线性时,实心等厚盘的热应力是按(径向线性)变化的。
31.关于等厚盘的热应力,不论实心盘或空心盘,由热负荷引起的(周向)应力产生的总的压缩力和拉伸力是相等的。
32.对于等厚盘来说,由热负荷引起的周向应力沿半径积分,结果为( 0 \mathbf{0} 0)。
33.对于实心盘而言,锥形盘的应力分布比等厚盘合理得多,因而在相同的要求下,重量要(轻)些。
34.全盘中各处径向应力和周向应力都各等于某一常数,则盘重量应是最轻的,这就是(等强度盘)。
35.等强度盘必须要求温度按(对数)规律变化,若其全盘上温度(一致),才能达到完全的等强度。
36.轮盘总安全系数是将轮盘(破坏转速)与最大工作转速进行比较。
37.当沿半径各截面的周向应力都达到(屈服极限)时,就认为轮盘破坏。这时的转速定义为(破坏转速)。
简答题(预测)
1.轮盘强度计算中,需要满足的基本假设包括?
①轴对称假设;②平面应力假设(载荷分布与温度沿轴向(厚度)不变);③弹性假设
计算题(预测)
✈[例1]等厚盘的径向应力和周向应力满足公式:
σ
r
=
K
1
−
K
2
r
2
−
3
+
ν
8
A
r
2
−
α
E
r
2
∫
r
0
r
t
r
d
r
σ
θ
=
K
1
+
K
2
r
2
−
1
+
3
ν
8
A
r
2
+
α
E
r
2
∫
r
0
r
t
r
d
r
−
E
α
t
\begin{align} &{ \sigma _r=K_1-\frac{K_2}{r^2}-\frac{3+\nu}{8}Ar^2-\frac{\alpha E}{r^2}\int_{r_0}^r{trdr}}\notag \\ &{ \sigma _{\theta}=K_1+\frac{K_2}{r^2}-\frac{1+3\nu}{8}Ar^2+\frac{\alpha E}{r^2}\int_{r_0}^r{trdr}-E\alpha t}\notag \end{align}
σr=K1−r2K2−83+νAr2−r2αE∫r0rtrdrσθ=K1+r2K2−81+3νAr2+r2αE∫r0rtrdr−Eαt
试进一步推出等温空心等厚盘的应力表达式(孔边自由,盘转动,受外载
σ
a
\sigma_a
σa)
写出边界条件:
在盘孔( r = r 0 r=r_0 r=r0) σ r = 0 \sigma _r=0 σr=0
在盘缘( r = r a r=r_a r=ra) σ r = σ a \sigma _r=\sigma_a σr=σa
带入应力公式:
σ
r
=
K
1
−
K
2
r
0
2
−
3
+
ν
8
A
r
0
2
−
α
E
r
0
2
∫
r
0
r
0
t
r
d
r
=
0
σ
r
=
K
1
−
K
2
r
a
2
−
3
+
ν
8
A
r
a
2
−
α
E
r
a
2
∫
r
0
r
a
t
r
d
r
=
σ
a
\sigma _r=K_1-\frac{K_2}{r_{0}^{2}}-\frac{3+\nu}{8}Ar_{0}^{2}-\frac{\alpha E}{r_{0}^{2}}\int_{r_0}^{r_0}{trdr}=0 \\ \sigma _r=K_1-\frac{K_2}{r_{a}^{2}}-\frac{3+\nu}{8}Ar_{a}^{2}-\frac{\alpha E}{r_{a}^{2}}\int_{r_0}^{r_a}{trdr}=\sigma _a
σr=K1−r02K2−83+νAr02−r02αE∫r0r0trdr=0σr=K1−ra2K2−83+νAra2−ra2αE∫r0ratrdr=σa
解得:
K
1
=
3
+
ν
8
A
(
r
0
2
+
r
a
2
)
+
α
E
t
0
2
+
r
a
2
r
a
2
−
r
0
2
σ
a
K
2
=
3
+
ν
8
A
r
0
2
r
a
2
+
α
E
t
0
2
r
0
2
+
r
0
2
r
a
2
r
a
2
−
r
0
2
σ
a
\begin{align} K_1&=\frac{3+\nu}{8}A\left( r_{0}^{2}+r_{a}^{2} \right) +\frac{\alpha Et_0}{2}+\frac{r_{a}^{2}}{r_{a}^{2}-r_{0}^{2}}\sigma _a\notag \\ K_2&=\frac{3+\nu}{8}Ar_{0}^{2}r_{a}^{2}+\frac{\alpha Et_0}{2}r_{0}^{2}+\frac{r_{0}^{2}r_{a}^{2}}{r_{a}^{2}-r_{0}^{2}}\sigma _a\notag \end{align}
K1K2=83+νA(r02+ra2)+2αEt0+ra2−r02ra2σa=83+νAr02ra2+2αEt0r02+ra2−r02r02ra2σa
再带入应力公式化简得:
σ
r
=
3
+
ν
8
A
(
r
a
2
+
r
0
2
−
r
a
2
r
0
2
r
2
−
r
2
)
+
r
a
2
(
r
2
−
r
0
2
)
r
2
(
r
a
2
−
r
0
2
)
σ
a
σ
θ
=
3
+
ν
8
A
(
r
a
2
+
r
0
2
+
r
a
2
r
0
2
r
2
−
1
+
3
ν
3
+
ν
r
2
)
+
r
a
2
(
r
2
+
r
0
2
)
r
2
(
r
a
2
−
r
0
2
)
σ
a
\begin{align} \sigma _r&=\frac{3+\nu}{8}A\left( r_{a}^{2}+r_{0}^{2}-\frac{r_{a}^{2}r_{0}^{2}}{r^2}-r^2 \right) +\frac{r_{a}^{2}\left( r^2-r_{0}^{2} \right)}{r^2\left( r_{a}^{2}-r_{0}^{2} \right)}\sigma _a \notag \\ \sigma _{\theta}&=\frac{3+\nu}{8}A\left( r_{a}^{2}+r_{0}^{2}+\frac{r_{a}^{2}r_{0}^{2}}{r^2}-\frac{1+3\nu}{3+\nu}r^2 \right) +\frac{r_{a}^{2}\left( r^2+r_{0}^{2} \right)}{r^2\left( r_{a}^{2}-r_{0}^{2} \right)}\sigma _a \notag \end{align}
σrσθ=83+νA(ra2+r02−r2ra2r02−r2)+r2(ra2−r02)ra2(r2−r02)σa=83+νA(ra2+r02+r2ra2r02−3+ν1+3νr2)+r2(ra2−r02)ra2(r2+r02)σa
还可以应用叠加原理,将外缘无载荷旋转空心盘应力与外缘有载荷静止空心盘应力相加即可。
第3章 联接零件的强度计算
选择题
☛叶片所受的周向气体力将在轴上产生(B)
A、 弯矩 B、 扭矩 C、 陀螺力矩 D、 轴向力
☛以下轴所受的载荷在全轴上大小都是一样的是(D)。
A、轴及盘的不平衡的离心力所产生的弯矩
B、盘的惯性力所产生的弯矩
C、盘机动飞行所受的陀螺力矩
D、扭矩
第5章 叶片振动
选择题
☛弹性体的叶片在气动力作用下形成的气弹耦合的自激振动,称为(B)
A、强迫振动 B、颤振 C、失速旋转 D、自由振动
☛判断下面叶片的振动类型(C)

A、三阶弯曲振动 B、一阶扭转振动 C、三阶扭转振动 D、复合振动
☛叶片上出现一条纵向节线和两条横向节线组合振型的振动称为(C)。
A、二阶弯曲振动 B、弦向弯曲振动 C、二阶扭转振动 D、复合振动
☛对于结构形状复杂、载荷和支承情况也复杂的叶片自振频率进行求解,应当使用(D)
A、能量法 B、渐近法 C、逐站推算法 D、有限元法
☛对于等截面工作叶片,前三阶弯曲自振频率之比为(C)。
A、1:2:3 B、1:4:9 C、1:6.3:17.5 D、1:3:5
☛对于等截面工作叶片,前三阶扭转自振频率之比为(B)。
A、1:2:3 B、1:3:5 C、1:4:9 D、1:6:3:17:5
☛下列那种振动的自振频率受扭向的影响最大(C)
A、一扭振动 B、一弯振动 C、二弯振动 D、二扭振动
☛对于实际发动机,当转速达到最大转速的(A),叶片根部就可以看做“完全固装”的情况。
A、60% B、50% C、70% D、80%
☛(C)是从改变激振力频率的角度来避免叶片振动故障。
A、叶身减振凸台
B、改变叶片材料
C、改变静子叶片数目
D、改变叶身型面
☛[选择题](B)是从改变叶片自振频率的角度来排除叶片振动故障。
A、采用不等距静子叶栅 [减弱激振力]
B、改变叶片材料
C、改变静子叶片数目 [改变激振力频率]
D、改进进气支柱数目 [改变激振力频率]
判断题
对于振动,频率越高,危险性越大。(✘)
动频系指叶片旋转时在离心力场作用下的自振频率。(✔)
振幅也就是叶片的振动形态。(✘)
共振时叶片截面上振幅为零的各点的连线称为节线。(✔)
当激振力增大时,叶片的自振频率随之增加。(✘)
强迫振动的频率是叶片的固有特性,与初始条件无关。(✘)
叶片受自激力作用产生的振动为强迫振动。(✘)
叶片扭转振动的自振频率随转速的增加而提高。(✘)
扭转振动频率与扭向的关系甚大。(✘)
叶片根部非固装的情况下,叶片自振频率将增加。(✘)
在发动机的整个工作过程中,叶片的共振现象是可以避免的。(✘)[不可避免]
发动机中由于转动零件产生的交变力和力矩称为机械激振力。(✔)
转子不平衡引起的激振频率等于发动机的转速。(✔)
对于工作叶栅,旋转失速区相对它以发动机转速的一半向叶盆方向旋转。(✘)[叶背]
静子叶栅的失速区为5个,发动机的转速为12000r/min,对于工作叶片的激振力频率为500Hz。(✔)
激振力频率等于叶片自振频率的整数倍时,这种共振称为谐共振。(✘)[整分数倍]
动频线与激振频率射线的相交点即为共振点。(✔)
通过改变进气支柱的数目,可以改变尾迹激振力频率。(✔)
采用斜静子叶片可以有效地减弱转子叶片的激振力。(✔)
静子叶片数为18,发动机转速为12000r/min时,静子叶片所产生的尾流激振力最小频率为3600Hz。(✔)
采用不等距的静子叶栅可以减弱其造成的尾迹激振力。(✔)
在叶片根部加厚将增加叶片弯曲振动频率。(✔)
对于销钉式叶片,增加销钉和销孔的配合间隙,可以使一弯振动频率降低。(✔)
填空题
38.叶片振动的基本参数有振动(频率)、(振型)、振幅、振动应力和节线。
39.叶片每秒钟振动的次数称为振动(频率)。
40.对于叶片振动,频率越高,振幅越(小)。
41.(振型)也就是叶片的振动形态。
42.振动时,叶片各截面上的质点距原平衡位置的最大距离称为(振幅)。
43.振动交变载荷产生的应力为(振动)应力。
44.共振时叶片截面上振幅为零的各点的连线称为(节线)。
45.振动系统在无外力作用下所发生的振动为(自由)振动。
46.振动系统在周期性交变外载荷或位移作用下所产生的振动为(强迫)振动。
47.(强迫)振动频率与激振力频率相等。
48.气体(尾流激振)及旋转失速造成的气体激振均属强迫振动。
49.(自激)振动一旦发生就会产生一种能激发自己振动的载荷。
50.受某些多变因素或多种因素激起的振动多为(随机)振动。
51.按振动类型分,叶片振动可分为(弯曲)振动、扭转振动、(复合)振动。
52.叶片上出现一条横节线振型的振动称为(一阶弯曲)振动。
53.叶片一阶弯曲振动中,叶尖振幅最(大),靠近叶根部振动应力最(大)。
54.(弦向)弯曲振动是叶片沿叶高在弦线方向出现具有两条或三条纯纵向节线的弯曲振动。
55.出现(一)条纵线和(两)条横向节线组合振型的振动称为二阶扭转振动。
56.(复合)振动通常为弯曲振动与扭转振动的合成振动。
57.等截面叶片振动时,每一微元段都是(简谐)运动。
58.等截面工作叶片前三阶弯曲振动频率的比值为(1:6.3:17.5)。
59.等截面工作叶片前三阶扭转振动频率的比值为(1:3:5)。
60.叶片弯曲振动的运动方程是基于(弹性恢复力)和质量的(惯性力)相平衡而建立的。
61.温度升高,叶片的弯曲频率会(减小)。
62.离心力相当于增强了叶片的弹性恢复力,使叶片各阶固有频率(有所提高)。
63.发动机中由于转动零件产生的交变力和力矩称为(机械)激振力。
64.附件传动齿的齿数为34,发动机转速为12000r/min,其产生的激振力频率为(6800)Hz。
65.如果激振力的频率等于叶片的自振频率,叶片便产生(共振)。
66.静子叶片数目为30,转子转速为10000r/min,其所产生的尾流激振力最小频率为(5000)Hz。
67.静子叶栅的失速区为4个,发动机的转速为12000r/min,对于工作叶片的激振力频率为(400)Hz。
68.激振力频率等于叶片自振频率的整倍数时,这种共振称为(谐共振)。
69.叶片的Campbell图是比较常用的判断叶片是否存在有共振和共振转速的工程图解法。其中每条射线都是发动机转速的整倍数,称为(激振频率射线)。它与(自振频率线)的相交点都是共振点。从相交点向下作垂线与横坐标的交点就是(共振)转速。
70.叶片叶身减振可采用(减振凸台)和叶冠。
简答题(预测)
1.研究等截面叶片的弯曲振动时,作出了哪些假设?
这里研究等截面、无扭向、根部固装的叶片振动情况。
设梁由无限多的微元段 d x dx dx组成。各微元段之间的截面上作用着弯曲力矩和切力。假想梁上任一微元段都沿横向做周期性的振动。
①每一微元段都是简谐运动;②每一微元段振动频率相同;③在振动时各微元段的相位相同。
2.简谐振动公式的释义
每个微元段的简谐振动方程:
y
=
y
0
cos
p
t
y=y_0\cos pt
y=y0cospt
式中:
y
y
y为任意微元段振动的瞬时横向位移(挠度),它是叶片长度方向坐标
x
x
x及时间
t
t
t的函数。
y
0
y_0
y0为弹性线,就是当
c
o
s
p
t
=
1
\mathrm{cos}pt=1
cospt=1时,即全梁振动到边缘位置时,各微元段的横向位移。显然
y
0
y_0
y0只是
x
x
x的函数。
p
p
p是微元段的公共角频率。因此,上式还可以写为如下的形式:
y
(
x
,
t
)
=
y
0
(
x
)
cos
p
t
y\left( x,t \right) =y_0\left( x \right) \cos pt
y(x,t)=y0(x)cospt
3.判断叶片的振型
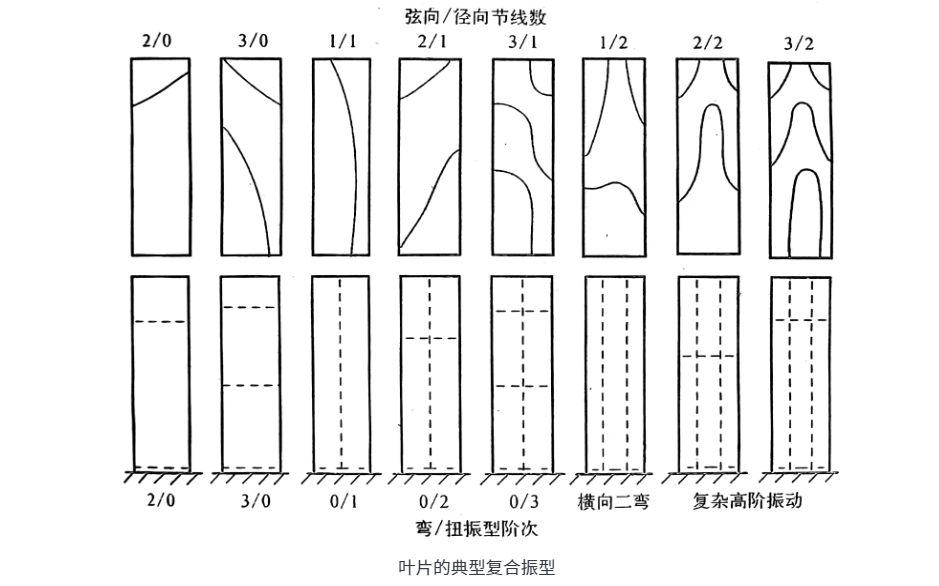
4.影响叶片自振频率的因素
(1)离心力;(2)温度;(3)扭向;(4)盘;(5)根部固装情况;(6)叶片尺寸。
5.改变激振力频率或减弱激振力的措施
(1)改进支柱设计
改变激振力频率:利用
f
激
=
S
Z
(
n
60
)
(
S
=
1
,
2
,
3
⋯
)
f_{\text{激}}=SZ\left( \dfrac{n}{60} \right) \,\, \left( S=1,2,3\cdots \right)
f激=SZ(60n)(S=1,2,3⋯) (
Z
Z
Z表示支柱数)
减弱激振力:支柱前移或改善支柱的型面设计。
(2)改进燃烧室设计
改变激振力频率:利用
f
激
=
S
Z
(
n
60
)
(
S
=
1
,
2
,
3
⋯
)
f_{\text{激}}=SZ\left( \dfrac{n}{60} \right) \,\, \left( S=1,2,3\cdots \right)
f激=SZ(60n)(S=1,2,3⋯) (
Z
Z
Z表示火焰管或喷嘴数)
减弱激振力:改善火焰筒或环形燃烧室喷嘴的气流分布;调换喷嘴。
(3)改变静子叶片数目
改变激振力频率:利用
f
激
=
S
Z
(
n
60
)
(
S
=
1
,
2
,
3
⋯
)
f_{\text{激}}=SZ\left( \dfrac{n}{60} \right) \,\, \left( S=1,2,3\cdots \right)
f激=SZ(60n)(S=1,2,3⋯) (
Z
Z
Z表示静子叶片数目)
减弱激振力:采用斜静子叶片。
(4)采用不等距的静子叶栅可以减弱激振力。
6.改变叶片自振频率的措施
(1)改变叶片材料(常通过改变 E ρ \sqrt{\dfrac{E}{\rho}} ρE来改变自振频率)
(2)改变叶身型面
①在几个截面或全部截面上加厚或减薄少许,优点是对工艺方面改动少,缺点是对频率改变不敏感;(等截面叶片的各阶弯曲振动自振频率与其厚度成正比)
②在叶身的某一局部去掉一些材料。(只在根部加厚或只在尖部减薄可以增加弯曲频率,反之可以降低弯曲频率)
(3)改变销孔配合间隙
销钉式联接有一定的减振效果,而且它的弯曲自振频率(主要是一弯)与销孔配合间隙有关。在一定范围内加大配合间隙,可以使一弯频率降低,反之提高。
7.提高叶片的抗振能力的措施
①提高叶片的阻尼,使振动水平下降;②提高叶片材料的疲劳强度;③采用特殊的抗振结构,常用的减振构造分为叶根减振(减振块)和叶身减振。
计算题
✈[例1]等截面叶片截面积为 2.24 c m 2 2.24\mathrm{cm^2} 2.24cm2,截面惯性矩 0.032 c m 4 0.032\mathrm{cm^4} 0.032cm4,长 9 c m 9\mathrm{cm} 9cm,铝制,求各阶弯曲自振频率。
对于压气机常用材料(钢、铝合金、钛合金),
E
ρ
\dfrac{E}{\rho}
ρE几乎完全相同,令
E
ρ
=
5
×
1
0
3
m
/
s
\sqrt{\dfrac{E}{\rho}}=5\times 10^3\mathrm{m}/\mathrm{s}
ρE=5×103m/s,带入频率公式,得:
f
1
=
2.8
×
1
0
3
l
2
J
A
=
2.8
×
1
0
3
0.0
9
2
0.032
×
1
0
−
8
2.24
×
1
0
−
4
=
413
H
z
f
2
=
6.3
×
f
1
=
6.3
×
413
=
2601.9
H
z
f
3
=
17.5
×
f
1
=
17.5
×
413
=
7227.5
H
z
f_1=\frac{2.8\times 10^3}{l^2}\sqrt{\frac{J}{A}}=\frac{2.8\times 10^3}{0.09^2}\sqrt{\frac{0.032\times 10^{-8}}{2.24\times 10^{-4}}}=413\mathrm{Hz} \\ f_2=6.3\times f_1=6.3\times 413=2601.9\mathrm{Hz} \\ f_3=17.5\times f_1=17.5\times 413=7227.5\mathrm{Hz}
f1=l22.8×103AJ=0.0922.8×1032.24×10−40.032×10−8=413Hzf2=6.3×f1=6.3×413=2601.9Hzf3=17.5×f1=17.5×413=7227.5Hz
✈[例2]已知等截面悬臂梁尖部振幅为
8
m
m
8\mathrm{mm}
8mm,振动为一阶弯曲。求梁中点的振幅。
一阶振型函数为
y
01
=
C
ϕ
1
y_{01}=C\phi _1
y01=Cϕ1,已知当
x
l
=
1
\dfrac{x}{l}=1
lx=1,
ϕ
1
=
1
\phi _1=1
ϕ1=1,
y
01
=
C
=
0.08
y_{01}=C=0.08
y01=C=0.08
当
x
l
=
0.5
\dfrac{x}{l}=0.5
lx=0.5查表得
ϕ
1
=
0.3395
\phi _1=0.3395
ϕ1=0.3395,因此
y
01
=
0.08
×
0.3395
=
0.2716
c
m
y_{01}=0.08\times0.3395=0.2716\mathrm{cm}
y01=0.08×0.3395=0.2716cm
✈[例3]等截面叶片振动时,测得在 x l = 1 3 \dfrac{x}{l}=\dfrac{1}{3} lx=31和 x l = 1 \dfrac{x}{l}=1 lx=1处的振幅各为 0.32 c m 0.32\mathrm{cm} 0.32cm和 2.0 c m 2.0\mathrm{cm} 2.0cm,判断它是哪阶振动?
| x l = 1 3 \dfrac{x}{l}=\dfrac{1}{3} lx=31 | x l = 1 \dfrac{x}{l}=1 lx=1 | ϕ ( x l = 1 3 ) / ϕ ( x l = 1 ) {{\phi _{\left( \frac{x}{l}=\frac{1}{3} \right)}}\Bigg/{\phi _{\left( \frac{x}{l}=1 \right)}}} ϕ(lx=31)/ϕ(lx=1) | |
|---|---|---|---|
| ϕ 1 \phi_1 ϕ1(一阶) | 0.163 0.163 0.163 | 1 1 1 | 0.163 0.163 0.163 |
| ϕ 2 \phi_2 ϕ2(二阶) | − 0.583 -0.583 −0.583 | 1 1 1 | − 0.583 -0.583 −0.583 |
| ϕ 3 \phi_3 ϕ3(三阶) | 0.725 0.725 0.725 | 1 1 1 | 0.725 0.725 0.725 |
| 测得值 | 0.32 0.32 0.32 | 2 2 2 | 0.16 0.16 0.16 |
对比可得,该振动属于一阶弯曲振动。
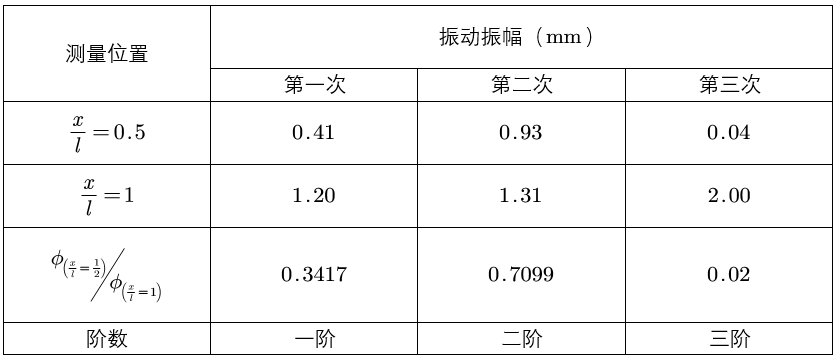
✈[例4]某等截面叶片振动时,测得叶片两处振动振幅如下表,试判断这三次的振动各属于哪一阶的弯曲振动?
第6章 盘和壳体的振动
选择题
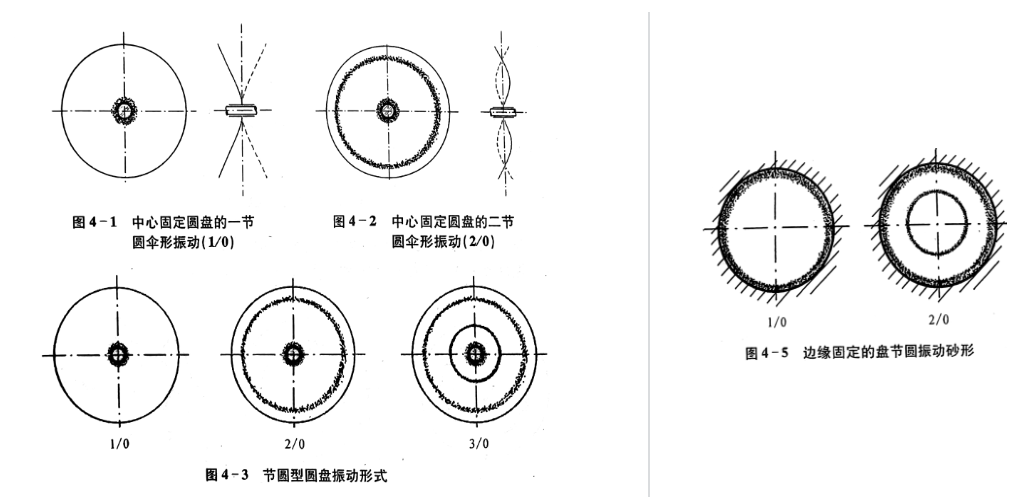
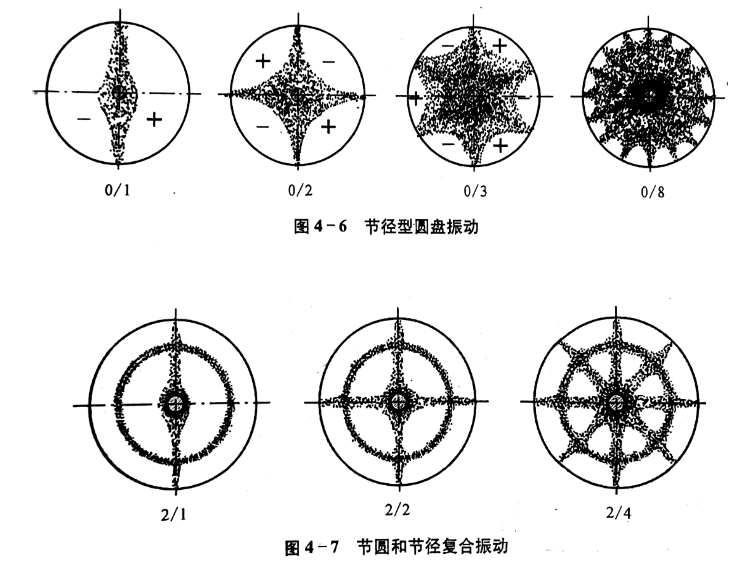
☛判断下面轮盘的振动类型(C)

A、弯曲振动 B、节圆振动 C、节径振动 D、伞形振动
填空题
71.轮盘的振动形式可以分为:第一类振动:(节圆振动),这类振动一般不会导致轮盘的损坏;第二类振动:(节径振动),这类振动容易引起轮盘的损坏;复合振动。
72.(逆动波)的移动速度和盘的旋转速度相等,波形将在空间停止不动,称为(驻波)。
简答题(预测)
1.判断盘的振型
分子为节圆数,分母为节径数。
2.引起盘振动的激振力有哪些来源?
(1)叶片受到周期性变化的气体力传递给盘;
(2)其它零件的力通过联接环或轴传递给盘;
(3)盘面气体压力不均,或有周期性变化。
第7章 发动机的振动与平衡
判断题
完全平衡的轴-盘系统除非在特定转速下,轴可以产生任何挠度外,其它情况下,轴都不会有挠度。(✔)
偏心距的存在与否不影响转子临界转速的数值,因此,对转子的平衡并不能减少振动。(✘)
不完全平衡的轴-盘系统除非在特定的转速下,轴才有挠度。(✘)
当转子由亚临界越过临界而过渡到超临界时,质心将由挠曲线内侧转向外侧。(✘)
转子外径D与其长度L满足D/L<5时,不论其工作转速高低都只需进行静平衡。(✘)[D/L>5,需静平衡]
填空题
73.轴的挠度达到最大值时,这时轴的转速就称为(临界转速)。
74.不平衡转子旋转时,在临界转速以下,处于(亚临界)状态;在临界转速以上,处于(超临界)状态。
75.发动机转子不平衡的表现形式有:(静不平衡)和(动不平衡)两种。
76.对轴的挠度起到抑制效果最常用而有效的是(挤压油膜)阻尼器
简答题
1.处理临界转速的方法
(1)将转子的临界转速调到发动机的最大转速以上
一般认为临界转速应高于最大工作转速的 30 % 30\% 30%,就可以避开大的振动。
(2)将转子的临界转速调到发动机的最低转速以下
(3)增加阻尼器或挠度阻尼器
对轴的挠度起到抑制效果最常用而有效的是挤压油膜阻尼器
(4)利用非线性的作用
(5)改善转子的平衡
计算题
✈[例1]有单盘实心轴转子,尺寸如下图所示。设盘的偏心距为 3 × 1 0 − 5 m 3\times10^{-5}\mathrm{m} 3×10−5m,求 n = 2000 n=2000 n=2000和 3000 r p m 3000\mathrm{rpm} 3000rpm时,轴在装盘处的挠度。假设无摩擦和陀螺力矩。

由题目可知: E = 2.1 × 1 0 11 P a E=2.1\times10^{11}\mathrm{Pa} E=2.1×1011Pa, J = π d 4 / 64 = 3.976 × 1 0 − 8 m 4 J=\pi d^4/64=3.976\times10^{-8}\mathrm{m^4} J=πd4/64=3.976×10−8m4, m = 5 k g m=5\mathrm{kg} m=5kg, l = 1.2 m l=1.2\mathrm{m} l=1.2m, a = 0.4 / 1.2 = 1 / 3 a=0.4/1.2=1/3 a=0.4/1.2=1/3;
可算出轴在装盘处的刚性系数:
C
=
3
E
J
a
2
(
1
−
a
)
2
l
3
=
2.935
×
1
0
5
N
/
m
C=\frac{3EJ}{a^2\left( 1-a \right) ^2l^3}=2.935\times 10^5\mathrm{N}/\mathrm{m}
C=a2(1−a)2l33EJ=2.935×105N/m
临界转速:
ω
c
r
=
C
m
=
242.3
r
a
d
/
s
n
c
r
=
60
ω
c
r
2
π
=
2314
r
p
m
\omega _{cr}=\sqrt{\frac{C}{m}}=242.3 \mathrm{rad}/\mathrm{s} \\ n_{cr}=\frac{60\omega _{cr}}{2\pi}=2314 \mathrm{rpm}
ωcr=mC=242.3rad/sncr=2π60ωcr=2314rpm
当
n
=
2000
r
p
m
n=2000\mathrm{rpm}
n=2000rpm时,盘处于亚临界状态
ω
=
2
π
n
60
=
209.4
r
a
d
/
s
\omega =\frac{2\pi n}{60}=209.4\mathrm{rad}/\mathrm{s}
ω=602πn=209.4rad/s
故盘处挠度为:
y
=
e
(
ω
ω
c
r
)
2
1
−
(
ω
ω
c
r
)
2
=
3
×
1
0
−
5
×
(
209.4
242.3
)
2
1
−
(
209.4
242.3
)
2
=
8.85174
×
1
0
−
5
m
y=\frac{e\left( \dfrac{\omega}{\omega _{cr}} \right) ^2}{1-\left( \dfrac{\omega}{\omega _{cr}} \right) ^2}=\dfrac{3\times 10^{-5}\times \left( \dfrac{209.4}{242.3} \right) ^2}{1-\left( \dfrac{209.4}{242.3} \right) ^2}=8.85174\times 10^{-5}\mathrm{m}
y=1−(ωcrω)2e(ωcrω)2=1−(242.3209.4)23×10−5×(242.3209.4)2=8.85174×10−5m
当
n
=
3000
r
p
m
n=3000\mathrm{rpm}
n=3000rpm时,盘处于超临界状态
ω
=
2
π
n
60
=
314.2
r
a
d
/
s
\omega =\frac{2\pi n}{60}=314.2\mathrm{rad}/\mathrm{s}
ω=602πn=314.2rad/s
故盘处挠度为:
y
=
e
(
ω
ω
c
r
)
2
(
ω
ω
c
r
)
2
−
1
=
3
×
1
0
−
5
×
(
314.2
242.3
)
2
(
314.2
242.3
)
2
−
1
=
7.40184
×
1
0
−
5
m
y=\frac{e\left( \dfrac{\omega}{\omega _{cr}} \right) ^2}{\left( \dfrac{\omega}{\omega _{cr}} \right) ^2-1}=\frac{3\times 10^{-5}\times \left( \dfrac{314.2}{242.3} \right) ^2}{\left( \dfrac{314.2}{242.3} \right) ^2-1}=7.40184\times 10^{-5}\mathrm{m}
y=(ωcrω)2−1e(ωcrω)2=(242.3314.2)2−13×10−5×(242.3314.2)2=7.40184×10−5m
✈[例2]已知双支点等截面带盘的轴如下图所示,分别计算下列三种情况的临界转速:(1)光轴(不计盘质量);(2)单盘无重轴;(3)单盘计入轴质量。
已知:
E
=
2.1
×
1
0
11
P
a
ρ
=
7.8
×
1
0
3
k
g
/
m
3
A
=
π
d
2
/
4
=
7.069
×
1
0
−
4
m
2
J
=
π
d
4
/
64
=
3.976
×
1
0
−
8
m
4
m
=
5
k
g
l
=
1.2
m
a
=
0.4
/
1.2
=
1
/
3
E=2.1\times 10^{11}\mathrm{Pa} \\ \rho =7.8\times 10^3\mathrm{kg}/\mathrm{m}^3 \\ A=\pi d^2/4=7.069\times10^{-4}\mathrm{m}^2 \\ J=\pi d^4/64=3.976\times 10^{-8}\mathrm{m}^4 \\ m=5\mathrm{kg} \\ l=1.2\mathrm{m} \\ a=0.4/1.2=1/3
E=2.1×1011Paρ=7.8×103kg/m3A=πd2/4=7.069×10−4m2J=πd4/64=3.976×10−8m4m=5kgl=1.2ma=0.4/1.2=1/3
(1)光轴:
ω
c
r
′
=
π
2
l
2
E
J
A
ρ
=
266.7
r
a
d
/
s
n
c
r
′
=
60
ω
c
r
′
2
π
=
2547
r
p
m
\omega _{cr}^{\prime}=\frac{\pi ^2}{l^2}\sqrt{\frac{EJ}{A\rho}}=266.7\mathrm{rad}/\mathrm{s} \\ n_{cr}^{\prime}=\frac{60\omega _{cr}^{\prime}}{2\pi}=2547\mathrm{rpm}
ωcr′=l2π2AρEJ=266.7rad/sncr′=2π60ωcr′=2547rpm
(2)单盘无重轴:
轴在装盘处的刚性系数:
C
=
3
E
J
a
2
(
1
−
a
)
2
l
3
=
2.935
×
1
0
5
N
/
m
C=\frac{3EJ}{a^2\left( 1-a \right) ^2l^3}=2.935\times 10^5\mathrm{N}/\mathrm{m}
C=a2(1−a)2l33EJ=2.935×105N/m
临界转速:
ω
c
r
′
′
=
C
m
=
242.3
r
a
d
/
s
n
c
r
′
′
=
60
ω
c
r
2
π
=
2314
r
p
m
\omega _{cr}^{''}=\sqrt{\frac{C}{m}}=242.3 \mathrm{rad}/\mathrm{s} \\ n_{cr}^{''}=\frac{60\omega _{cr}}{2\pi}=2314 \mathrm{rpm}
ωcr′′=mC=242.3rad/sncr′′=2π60ωcr=2314rpm
(3)单盘计轴质量:
根据顿克公式:
1
ω
c
r
2
=
1
(
ω
c
r
′
)
2
+
1
(
ω
c
r
′
′
)
2
ω
c
r
=
179.3
r
a
d
/
s
n
c
r
=
60
ω
c
r
2
π
=
1712
r
p
m
\frac{1}{\omega _{cr}^{2}}=\frac{1}{\left( \omega _{cr}^{\prime} \right) ^2}+\frac{1}{\left( \omega _{cr}^{''} \right) ^2} \\ \omega _{cr}=179.3\mathrm{rad}/\mathrm{s} \\ n_{cr}=\frac{60\omega _{cr}}{2\pi}=1712\mathrm{rpm}
ωcr21=(ωcr′)21+(ωcr′′)21ωcr=179.3rad/sncr=2π60ωcr=1712rpm

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









