






卡尔曼滤波
前言
卡尔曼滤波(Kalman filtering)是一种利用 线性系统 状态方程,通过系统输入输出观测数据,对 系统状态 进行最优估计的算法。 由于观测数据中包括系统中的噪声和干扰的影响,所以最优估计也可看作是 滤波 过程。 数据滤波是去除 噪声 还原真实数据的一种 数据处理 技术,Kalman滤波在测量方差已知的情况下能够从一系列存在测量噪声的数据中,估计动态系统的状态。 由于它便于计算机 编程 实现,并能够对现场采集的数据进行实时的更新和处理,Kalman滤波是目前应用最为广泛的滤波方法,在通信,导航,制导与控制等多领域得到了较好的应用。
一、什么是卡尔曼滤波
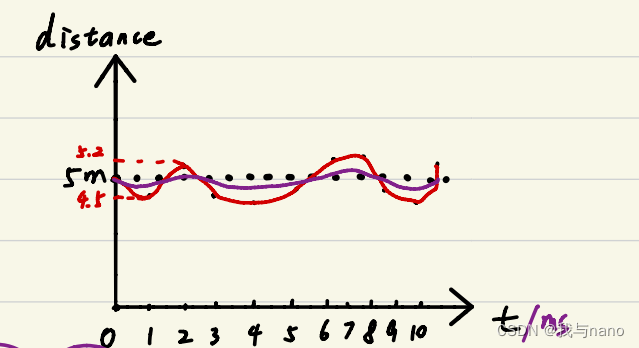
看这幅图,假如我们要的数据是5M,但是测算出来的距离为红线对应的距离,这个很乱我们是用不了的,经过滤波后我们得到了紫色线对应的曲线,这个误差很小。这便是卡尔曼滤波。
只要是存在不确定信息的动态系统,卡尔曼滤波就可以对系统下一步要做什么做出有根据的推测。即便有噪声信息干扰,卡尔曼滤波通常也能很好的弄清楚究竟发生了什么,找出现象间不易察觉的相关性。因此卡尔曼滤波非常适合不断变化的系统,它的优点还有内存占用较小(只需保留前一个状态)、速度快,是实时问题和嵌入式系统的理想选择。
二、适用系统
线性高斯系统
1.线性系统

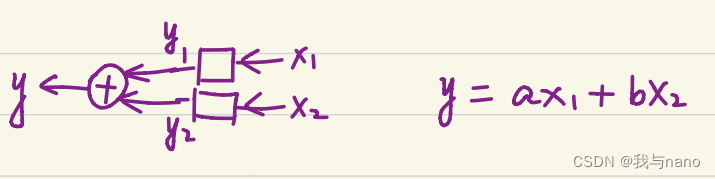
线性系统满足两个特性:叠加性、齐次性
叠加性
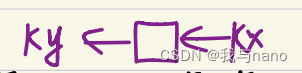
齐次性
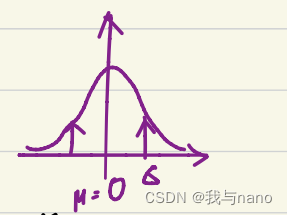
2.高斯系统
噪声满足正态分布
3.宏观意义
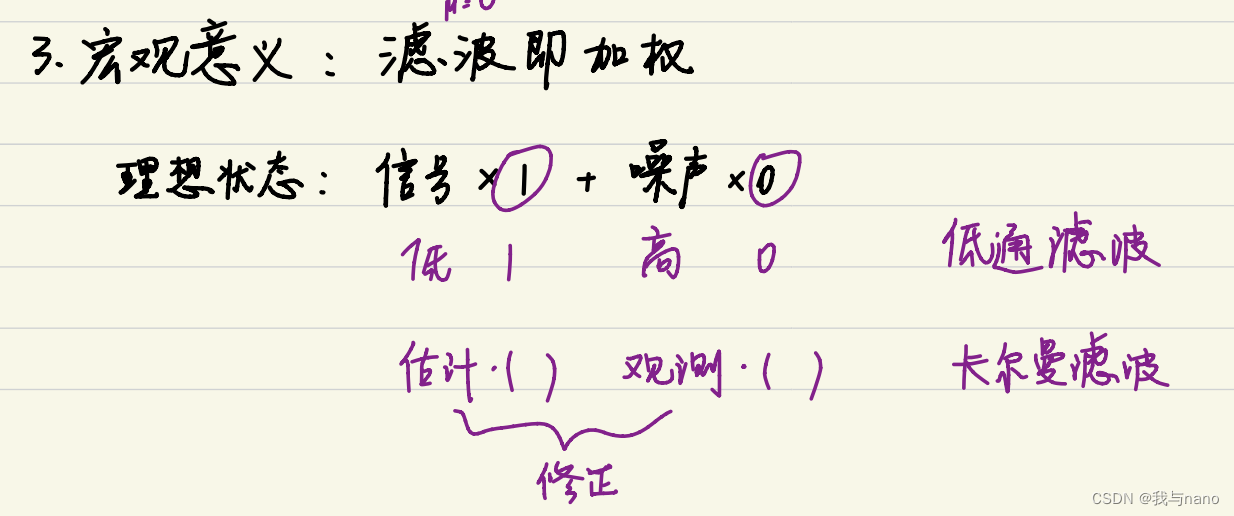
可能大家都知道低通滤波,将噪声直接消除,卡尔曼滤波呢,估计值×一个数+观测值×一个数得到一个最佳修正值。
总结
卡尔曼滤波到底是干嘛的呢,看下面这个例子
你已经建造了一个可以在树林里闲逛的小机器人,机器人需要确切地知道它在哪里,以便它可以导航。
我们会说我们的机器人有一个状态xk,这只是一个位置和一个速度:
请注意,状态只是有关系统基础配置的数字列表;它可以是任何东西。在我们的示例中,它是位置和速度,但它可以是有关油箱中液体量,汽车发动机温度,用户手指在触摸板上的位置或您需要跟踪的任何数量的数据。
我们的机器人还有一个GPS传感器,精确到10米左右,这很好,但它需要比10米更精确地知道它的位置。这些树林里有很多沟壑和悬崖,如果机器人错了几英尺,它可能会从悬崖上掉下来。因此,GPS本身还不够好。
我们可能还知道机器人是如何移动的:它知道发送到车轮电机的命令,并且知道如果它朝一个方向前进并且没有任何干扰,那么在下一刻,它可能会沿着同一方向走得更远。但是,它当然不知道它的运动:它可能会受到风的冲击,车轮可能会打滑一点,或者在颠簸的地形上翻滚;因此,车轮转动的量可能并不完全代表机器人实际行驶的距离,并且预测也不会完美。
GPS传感器告诉我们一些关于状态的信息,但只是间接的,并且有一些不确定性或不准确性。我们的预测告诉我们一些关于机器人如何移动的东西,但只是间接的,并且有一些不确定性或不准确性。
但是,如果我们使用所有可用的信息,我们能否得到比任何一种估计本身都更好的答案?当然,答案是肯定的,这就是卡尔曼滤波器的用途。















 773
773











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











