






一、实验器材
DE2-E115 FPGA开发板 + Quartus + Modelsim
学习并掌握HC_SR04模块的使用
二、实验原理
HC-SR04引脚
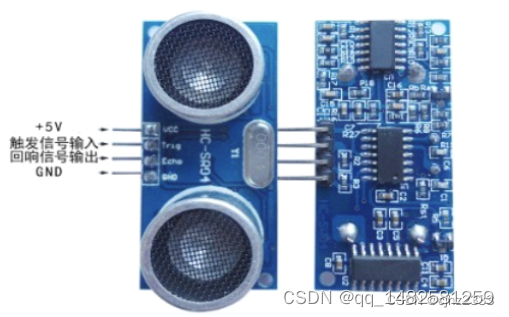
VCC: 电源引脚,超声波模块工作电压为5伏。
Trig: 是Trigger(触发)这个单词的缩写,该引脚用于触发超声波脉冲。
Echo: 该引脚会在高电平和低电平之间转换,当检测到障碍物时,在高电平保持的时间就表示信号发射出去并反射回来的时间。
GND: 接地引脚。
工作原理
模块测距工作原理:
(1) 主控设备给 Trig 脚提供一个 10us 的脉冲信号。
(2) HC-SR04 接收到信号,开始发送超声波,并把 Echo置为高电平,然后准备接收返回的超声波。
(3) HC-SR04 接收到返回的超声波,把 Echo 置为低电平。
(4) Echo 高电平持续的时间就是超声波从发射到返回的时间间隔。
我们知道距离=速度x时间,要求出超声波模块到障碍物之间的距离,我们就需要知道速度和时间。速度就是340m/s,也就是声音在空气中传播的速度,转换城cm/μs单位就是0.034 cm/μs。时间的话,由于我们得到的是信号从发射到返回的时间值,所以需要除以2。
最终得到的计算公式为:距离 = 0.034 cm/μs * 时间(μs) / 2
三、模块设计
测距模块代码
/*================================================*\
Filename ﹕
Author ﹕
Description ﹕超声波触发测距模块
波形周期300ms,前10us高电平
Called by ﹕
Revision History ﹕ mm/dd/202x
Revision 1.0
Email﹕
Company﹕
\*================================================*/
module hc_sr_trig(
input wire clk_us , //system clock 1MHz
input wire Rst_n , //reset ,low valid
output wire trig //触发测距信号
);
//Parameter Declarations
parameter CYCLE_MAX = 19'd300_000;
//Interrnal wire/reg declarations
reg [18:00] cnt ; //Counter
wire add_cnt ; //Counter Enable
wire end_cnt ; //Counter Reset
//Logic Description
always @(posedge clk_us or negedge Rst_n)begin
if(!Rst_n)begin
cnt <= 'd0;
end
else if(add_cnt)begin
if(end_cnt)begin
cnt <= 'd0;
end
else begin
cnt <= cnt + 1'b1;
end
end
else begin
cnt <= cnt;
end
end
assign add_cnt = 1'b1;
assign end_cnt = add_cnt && cnt >= CYCLE_MAX - 9'd1;
assign trig = cnt < 15 ? 1'b1 : 1'b0;
endmodule
时钟模块
/*================================================*\
Filename ﹕
Author ﹕
Description ﹕产生周期为1us的时钟信号
Called by ﹕
Revision History ﹕ mm/dd/202x
Revision 1.0
Email﹕
Company﹕
\*================================================*/
module clk_div(
input wire Clk , //system clock 50MHz
input wire Rst_n , //reset ,low valid
output wire clk_us //
);
//Parameter Declarations
parameter CNT_MAX = 19'd50;//1us的计数值为 50 * Tclk(20ns)
//Interrnal wire/reg declarations
reg [5:00] cnt ; //Counter
wire add_cnt ; //Counter Enable
wire end_cnt ; //Counter Reset
//Logic Description
always @(posedge Clk or negedge Rst_n)begin
if(!Rst_n)begin
cnt <= 'd0;
end
else if(add_cnt)begin
if(end_cnt)begin
cnt <= 'd0;
end
else begin
cnt <= cnt + 1'b1;
end
end
else begin
cnt <= cnt;
end
end
assign add_cnt = 1'b1;
assign end_cnt = add_cnt && cnt >= CNT_MAX - 19'd1;
assign clk_us = end_cnt;
endmodule
ECHO引脚与TRIG引脚
/*================================================*\
Filename ﹕
Author ﹕
Description ﹕超声波检测距离模块
本模块理论测试距离 2cm~510cm
输出结果保留两位小数
Called by ﹕
Revision History ﹕ mm/dd/202x
Revision 1.0
Email﹕
Company﹕
\*================================================*/
module hc_sr_echo(
input wire Clk , //clock 50MHz
input wire clk_us , //system clock 1MHz
input wire Rst_n , //reset ,low valid
input wire echo , //
output wire [18:00] data_o //检测距离,保留3位小数,*1000实现
);
/* S(um) = 17 * t --> x.abc cm */
//Parameter Declarations
parameter T_MAX = 16'd60_000;//510cm 对应计数值
//Interrnal wire/reg declarations
reg r1_echo,r2_echo; //边沿检测
wire echo_pos,echo_neg; //
reg [15:00] cnt ; //Counter
wire add_cnt ; //Counter Enable
wire end_cnt ; //Counter Reset
reg [18:00] data_r ;
//Logic Description
//如果使用clk_us 检测边沿,延时2us,差值过大
always @(posedge Clk or negedge Rst_n)begin
if(!Rst_n)begin
r1_echo <= 1'b0;
r2_echo <= 1'b0;
end
else begin
r1_echo <= echo;
r2_echo <= r1_echo;
end
end
assign echo_pos = r1_echo & ~r2_echo;
assign echo_neg = ~r1_echo & r2_echo;
always @(posedge clk_us or negedge Rst_n)begin
if(!Rst_n)begin
cnt <= 'd0;
end
else if(add_cnt)begin
if(end_cnt)begin
cnt <= cnt;
end
else begin
cnt <= cnt + 1'b1;
end
end
else begin //echo 低电平 归零
cnt <= 'd0;
end
end
assign add_cnt = echo;
assign end_cnt = add_cnt && cnt >= T_MAX - 1; //超出最大测量范围则保持不变,极限
always @(posedge Clk or negedge Rst_n)begin
if(!Rst_n)begin
data_r <= 'd2;
end
else if(echo_neg)begin
data_r <= (cnt << 4) + cnt;
end
else begin
data_r <= data_r;
end
end //always end
assign data_o = data_r >> 1;
endmodule
/*================================================*\
Filename ﹕
Author ﹕
Description ﹕超声波触发测距模块
波形周期300ms,前10us高电平
Called by ﹕
Revision History ﹕ mm/dd/202x
Revision 1.0
Email﹕
Company﹕
\*================================================*/
module hc_sr_trig(
input wire clk_us , //system clock 1MHz
input wire Rst_n , //reset ,low valid
output wire trig //触发测距信号
);
//Parameter Declarations
parameter CYCLE_MAX = 19'd300_000;
//Interrnal wire/reg declarations
reg [18:00] cnt ; //Counter
wire add_cnt ; //Counter Enable
wire end_cnt ; //Counter Reset
//Logic Description
always @(posedge clk_us or negedge Rst_n)begin
if(!Rst_n)begin
cnt <= 'd0;
end
else if(add_cnt)begin
if(end_cnt)begin
cnt <= 'd0;
end
else begin
cnt <= cnt + 1'b1;
end
end
else begin
cnt <= cnt;
end
end
assign add_cnt = 1'b1;
assign end_cnt = add_cnt && cnt >= CYCLE_MAX - 9'd1;
assign trig = cnt < 15 ? 1'b1 : 1'b0;
endmodule
顶层文件
/*================================================*\
Filename ﹕tb_hc_sr.v
Author ﹕Adolph
Description ﹕超声波驱动测试文件
Called by ﹕
Revision History ﹕ mm/dd/202x
Revision 1.0
Email﹕
Company﹕
\*================================================*/
`timescale 1ns/1ns //仿真系统时间尺度定义
`define clk_period 20 //时钟周期参数定义
module tb_hc_sr();
//激励信号定义
reg Clk ;
reg Rst_n ;
reg echo; //
//响应信号定义
wire trig ;
wire [6:0] hex1 ;
wire [6:0] hex2 ;
wire [6:0] hex3 ;
wire [6:0] hex4 ;
wire [6:0] hex5 ;
wire [6:0] hex6 ;
wire [6:0] hex7 ;
wire [6:0] hex8 ;
//实例化
HC_SR04_TOP HC_SR04_TOP(
/*input */.Clk (Clk ), //system clock 50MHz
/*input */.Rst_n (Rst_n ), //reset ,low valid
/*input */.echo (echo ), //
/*output */.trig (trig ), //触发测距信号
/*output [6:0] */.hex1 (hex1 ), // -共阳极,低电平有效
/*output [6:0] */.hex2 (hex2 ), // -
/*output [6:0] */.hex3 (hex3 ), // -
/*output [6:0] */.hex4 (hex4 ), //连接符
/*output [6:0] */.hex5 (hex5 ), //cm -
/*output [6:0] */.hex6 (hex6 ), //cm -
/*output [6:0] */.hex7 (hex7 ), //cm -
/*output [6:0] */.hex8 (hex8 ) //熄灭
);
//产生时钟
initial Clk = 1'b0;
always #(`clk_period / 2) Clk = ~Clk;
//产生激励
initial begin
Rst_n = 1'b0;
echo = 1'b0;
#(`clk_period * 20 + 3);
Rst_n = 1'b1;
#(`clk_period * 20);
wait(HC_SR04_TOP.hc_sr_driver.hc_sr_trig.cnt == 240);
echo = 1'b1;//测试超声波信号发送完成,echo拉高
#(50 * `clk_period * 2500 + 7);
echo = 1'b0;
#(`clk_period * 200);
$stop(2);
end
endmodule
然后编译,进行烧录。
总结
测距功能基本实现,如果使用平面物体近距离测试则误差不大,对于远距离测距则误差较大如果采用更好的滤波方式,那么数据的采集可能更精准。
















 826
826











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











