







 本文阐述了人工智能的多重定义,包括图灵测试、认知建模、理性思考和理性行为。强调了人工智能不仅是模仿人类,而是理解和研究思维原理。提到了自动驾驶、机器人等应用实例,同时讨论了人工智能的风险,如自主武器和有偏决策,以及智能体的理性行为在动态、不确定环境中的挑战。
本文阐述了人工智能的多重定义,包括图灵测试、认知建模、理性思考和理性行为。强调了人工智能不仅是模仿人类,而是理解和研究思维原理。提到了自动驾驶、机器人等应用实例,同时讨论了人工智能的风险,如自主武器和有偏决策,以及智能体的理性行为在动态、不确定环境中的挑战。
绪论
人工智能刚开始捧是近乎神学的地步,可是发展了这么多年,人们对于它的认识开始变得冷静,不再天花乱坠的吹嘘,也不再过度的担心会伤害乃至取代人类。
通过阅读本章,理解为什么人工智能是一个最值得研究的课题和人工智能究竟是什么。
人工智能究竟是什么
人工智能的概念要大于机器学习和深度学习,不同的派别有不同的观点。从人与理性以及思想与行为这两个维度来看,有 4 种可能的组合,而且这 4 种组合都有相应的研究项目。
类人行为:图灵测试方法
计算机要进行图灵测试需要具备一下功能:
自然语言处理
知识表示
自动推理
机器学习
计算机视觉
机器人学
而这些功能也在一定程度上构成了人工智能的研究方向。
类人思考:认知建模方法
• 内省(introspection)——试图在自己进行思维活动时捕获思维;
• 心理实验(psychological experiment)——观察一个人的行为;
• 大脑成像(brain imaging)——观察大脑的活动
认知科学(cognitive science)这一跨学科领域汇集了人工智能的计算机模型和心理学的实验技术,用以构建精确且可测试的人类心智理论。
在大二的时候我们开设了脑认知与科学这门课,感觉收益很深。计算机要能够像人类一样思考,就要人类了解人类学习,推理和决策的过程。可是对人体的研究不能限制人工智能发展的脚步,人工智能不能仅仅是模拟人类。只有脱离了模仿,转向研究原理,才能行稳至久。
理性思考:“思维法则”方法
人工智能中所谓的逻辑主义(logicism)传统希望在此类程序的基础上创建智能系统,逻辑要求关于世界的认知是确定的,而实际上这很难实现,为此,我们还需要关于理性行为的理论,仅靠理性思考是不够的。
理性行为:理性智能体方法
理性智能体(rational agent)需要为取得最佳结果或在存在不确定性时取得最佳期望结果而采取行动。
我理解的是要有约束条件,遵循基本的道德规范,但是现实世界的情况千变万化。就像之前听到一个案例,一个机器人在面对同时落水的父女两人,父亲有50%的可能性活下去,女儿只有20%的可能性,父亲要求救女儿,这时候机器人该如何抉择?还有就是例如,从火炉前退缩是一种反射作用,这通常比经过深思熟虑后采取的较慢的动作更为成功。本书后面有讨论有限理性,后面再看吧。
人工智能专注于研究和构建做正确的事情的智能体,其中正确的事情
是我们提供给智能体的目标定义。
益机——价值对齐问题(即施加给机器的价值或目标必须与人类的一致)
严格的安全目标是要求待在车库里而不要上路驾驶。向目的地前进和承担受伤风险是需要权衡的,应该如何进行这种权衡 我们想要的是对人类可证益的(provably beneficial)智能体
人工智能的基础
哲学 亚里士多德 三段论
数学
经济学
神经科学
心理学
计算机工程
控制理论与控制论
语言学
人工智能的历史
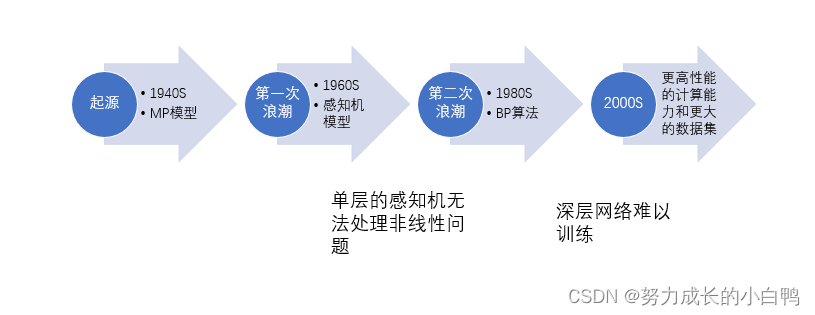
有观点认为,思维至少在某种程度上是根据逻辑或数值规则运作的,可以建立模仿其中的一些规则的物理系统。也有观点说,思维本身就是这样一个物理系统 。
目前的先进技术
自动驾驶
腿足式机器人
自动规划和调度
机器翻译
语音识别
推荐
博弈
图像理解
医学
气候科学
人工智能的风险和收益
致命性自主武器
监视和劝诱
有偏决策:
就业影响:
安全关键的应用:随
网络安全:人工智能技术可用于防御网络攻击,如检测异常的行为模式,但这些技术也能用于增强恶意软件的威力、生存能力和扩散能力。例如,强化学习方法已被用于创建高效的工具,这些工具可以进行自动化、个性化的勒索和钓鱼攻击。刚刚考完试的网络安全,我觉得强大的计算力和推理能力都有可能为已有的网络安全算法带来危险,但是人工智能的发展在安防等领域也正在做出巨大的贡献。
第二章主要讨论智能体的本质
2.1 智能体和环境
任何通过传感器(sensor)感知环境(environment)并通过执行(actuator)作用于该环境的事物都可以被视为智能体
感知(percept):表示智能体的传感器正在感知的内容
智能体的感知序列(percept sequence):智能体所感知的一切的完整历史。
智能体函数:从数学上讲,是智能体的行为。
人工智能体的智能体函数将由智能体程序(agent program)实现
2.2 良好行为:理性的概念
理性智能体(rational agent)是做正确事情的事物。
2.3 环境的本质
任务环境(task environment),本质上是“问题”,理性智能体是“解决方案”
任务环境的属性:
完全可观测的(fully observable)与部分可观测的
单智能体的(single-agent)与多智能体的(multiagent)
确定性的(deterministic)与非确定性的(nondeterministic)
回合式的(episodic)与序贯的(sequential)
静态的(static)与动态的(dynamic)、
离散的(discrete)与连续的(continuous)
已知的(known)与未知的(unknown)
2.4 智能体的结构
智能体 = 架构 + 程序
总结:
- 智能体是在环境中感知和行动的事物。智能体的智能体函数指定智能体在响应任意感知序列时所采取的动作。
- 性能度量评估智能体在环境中的行为。给定到目前为止所看到的感知序列,理性智能体的动作是为了最大化性能度量的期望值。
- 任务环境规范包括性能度量、外部环境、执行器和传感器。在设计智能体时,第一步必须始终是尽可能完整地指定任务环境。
- 任务环境在几个重要维度上有所不同。它们可以是完全可观测的或部分可观测的、单智能体的或多智能体的、确定性的或非确定性的、回合式的或序贯的、静态的或动态的、离散的或连续的、已知的或未知的。
- 在性能度量未知或难以正确指定的情况下,智能体优化错误目标的风险很大。在这种情况下,智能体设计应该反映真实目标的不确定性。
- 智能体程序实现智能体函数。存在各种基本的智能体编程,反映了决策过程中明确使用的信息类型。这些设计在效率、紧凑性和灵活性方面各不相同。智能体程序的适当设计取决于环境的性质。
- 简单反射型智能体直接响应感知,而基于模型的反射型智能体保持内部状态以跟踪当前感知中不明晰的世界状态。基于目标的智能体采取行动来实现目标,而基于效用的智能体试图最大化自己期望的“快乐”。
- 所有智能体都可以通过学习提升性能。

















 468
468

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









