







一、原理
通电导线会产生磁场,只要控制四个电磁铁接断电,就可以控制中央磁铁旋转。
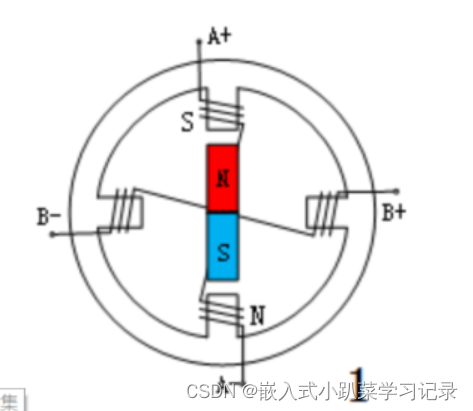
操作模式:控制中间磁铁一步转90°,称为全步模式。同理:45°半步。22.5°微步。
现实的步进电机是比较复杂的,因为转子的周围还有很多小齿,比如1.8步进值的电机的话转子齿为50,所以公式是360/50/8=0.9为半拍步进值。360/50/4=1.8才是步进值。根据对应手册计算。
二、代码
//正转代码,反转同理
IN1_HIGH;
delay_ms(speed);
IN1_LOW;
IN2_HIGH;
delay_ms(speed);
IN2_LOW;
IN3_HIGH;
delay_ms(speed);
IN3_LOW;
IN4_HIGH;
delay_ms(speed);
IN4_LOW;控制步进电机转多少最主要你得通过步进电机步距角度计算出电机转一圈需要多少脉冲,比如步距角度为0.9°则电机转一圈需要给步进电机驱动器360/0.9=400个脉冲,转半圈就是200个脉冲
我的算下来一圈4096个脉冲,我封装的一个函数八个脉冲,所以运行函数512次。所以代码为(需要自己查对应手册)
for( i = 0;i < 512;i++) //电机正转
stepper(Pos,5);

















 4391
4391

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











