






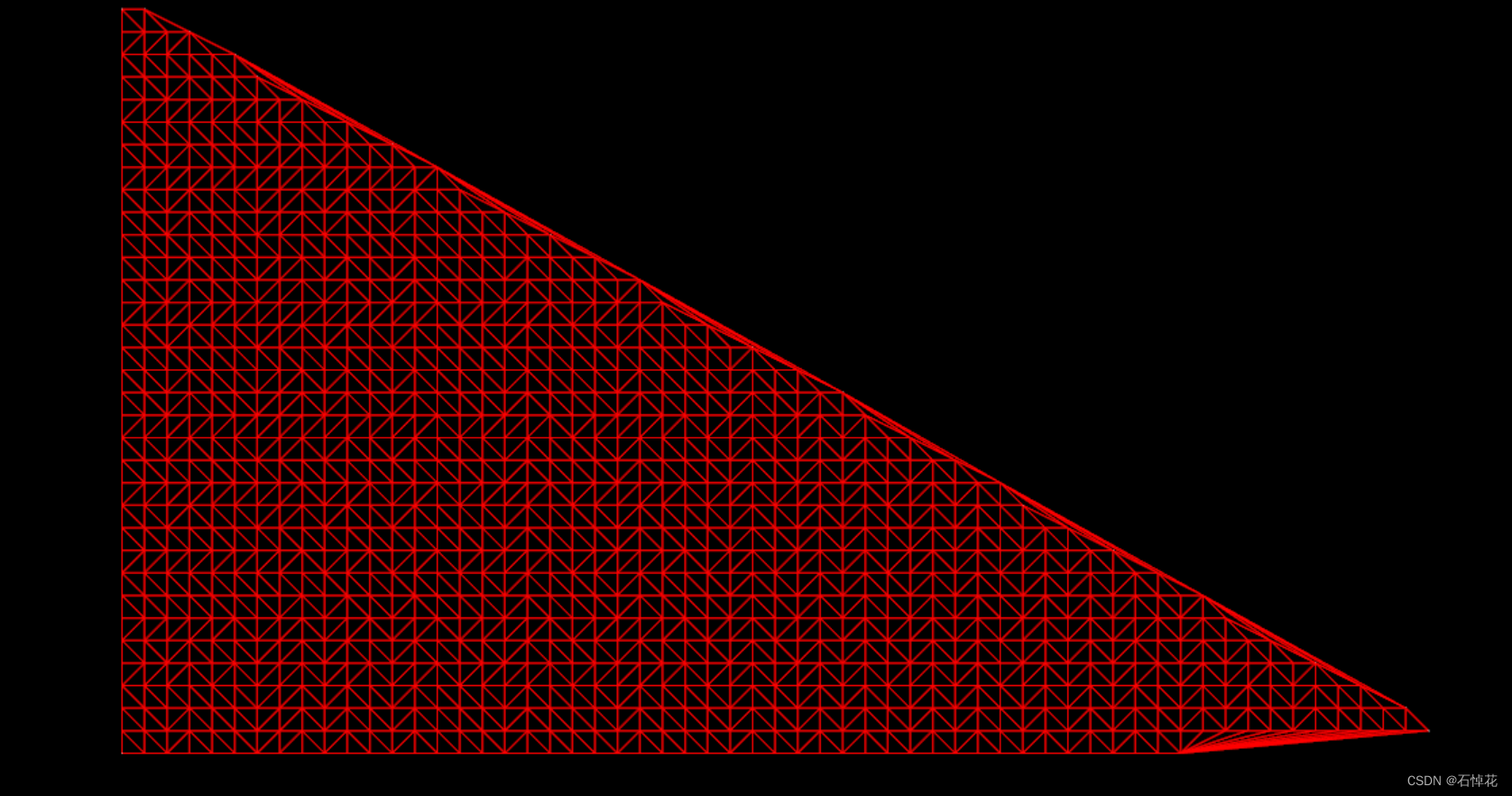
本文使用了PCL点云库来作可视化。结果如下图:
算法改编自一个JS程序。好像是github上的项目,但是时间比较长,不记得是哪个了。
最终结果和源程序基本一样。因为是出于兴趣写的,没有很严谨,无法保证算法的百分百正确。
感兴趣的可以将源码进行规范和优化。
下边是调用:
pcl::visualization::PCLVisualizer viewer("rgb");
std::vector<int> res = delaunayTransform(ptr);
viewer.addPointCloud(ptr, "cloud");
cout << res.size();
for (int i =0; i < res.size(); i+=2) {
viewer.addLine(ptr->points[res[i]], ptr->points[res[i+1]], 1, 0, 0, to_string(i));
}源码:
typedef pcl::PointXYZ PointT;
typedef pcl::PointCloud<PointT> PointCloudT;
static const float EPSILON = std::numeric_limits<float>::epsilon();
static const float PI = 3.1415926;
static const float cos30 = cos(PI / 6);
static const float cos60 = cos(PI / 3);
/*
* Triangle
*/
struct Triangle
{
PointT pa, pb, pc;
};
/*
* index of triangle
*/
struct TriangleIndex
{
int pa, pb, pc;
};
/*
* Triangle
*/
struct Circumcircle
{
float r = 0;
TriangleIndex index;
PointT center;
};
/*
* t_p1,t_p2 are the indexes of edges corresponding to vertex p1,p2
*/
struct Edges
{
int p1 = -1, p2 = -1;
int amount = 1;
int index = -1;
int t_p1 = -1;
int t_p2 = -1;
std::list<int> top;
};
struct Line
{
int p0 = -1, p1 = -1;
bool isGroup = false;
};
/*
* Get the super triangle of point cloud
*/
Triangle getSuperTranigle(PointCloudT::Ptr ptr);
/*
* Get circumcircle of each triangle
* If three points are in a straight line,it will return {}
*/
Circumcircle getCircumcircle(PointCloudT::Ptr ptr, TriangleIndex &index);
/*
* Remove those identical edges
* |it = edge.erase(it)| is necessary
*/
void removeEdge(std::list<int> &edge);
/*
* Delanay transform
* return sets of index of triangle vertices
*/
std::vector<int> delaunayTransform(PointCloudT::Ptr ptr);
float getDistance(PointT &a, PointT &b);
std::vector<PointT> getCircleCenter(PointT &a, PointT &b, float r);
bool equals(Edges &e1, Edges &e2);
void removeOutside(int &i, std::vector<Edges> &total, std::queue<Edges> &outside, int &top);
/*
* Alpha Shape
* 1. Construction of the Delaunay triangular network
* 2. Remove triangles that do not satisfy the alpha shape algorithm:
* (1) One side of the current triangle is longer than 2*alpha
* (2) The current side length is AB, constructs a circle with an alpha radius (usually has two circles), and one circle
* contains other points (excluding A, B)
* 3. Count the number of edges of the remaining triangular network
* 4. If the edge is unique, that is, the quantity is one, the edge is the boundary and the endpoint is the boundary point
*
* y
* ↑ · ·
* | · · ·
* | · · · ·
* | · ·
* —|——————→ x
*/
std::vector<int> delaunayAlphaShape(std::vector<int> &triangle, PointCloudT::Ptr ptr, double alpha);
Triangle getSuperTranigle(PointCloudT::Ptr ptr) {
PointT p_max, p_min, mid;
pcl::getMinMax3D(*ptr, p_min, p_max);
float dx = p_max.x - p_min.x;
float dy = p_max.y - p_min.y;
float dmax = dx > dy ? dx : dy;
Triangle super_triangle;
mid.x = p_min.x + dx * 0.5;
mid.y = p_min.y + dy * 0.5;
super_triangle.pa = { mid.x - 20 * dmax,mid.y - dmax,0 };
super_triangle.pb = { mid.x,mid.y + 20 * dmax,0 };
super_triangle.pc = { mid.x + 20 * dmax,mid.y - dmax ,0 };
return super_triangle;
}
Circumcircle getCircumcircle(PointCloudT::Ptr ptr, TriangleIndex& index) {
using namespace std;
Circumcircle circumcircle;
circumcircle.index = index;
PointT p1 = ptr->points[index.pa], p2 = ptr->points[index.pb], p3 = ptr->points[index.pc];
float xc, yc, m1, m2, mx1, mx2, my1, my2, dx, dy;
float delta_y1 = abs(p1.y - p2.y);
float delta_y2 = abs(p2.y - p3.y);
if (delta_y1 < EPSILON && delta_y2 < EPSILON) {
return circumcircle;
}
if (delta_y1 < EPSILON) {
m2 = -((p3.x - p2.x) / (p3.y - p2.y));
mx2 = (p2.x + p3.x) * 0.5;
my2 = (p2.y + p3.y) * 0.5;
xc = (p1.x + p2.x) * 0.5;
yc = m2 * (xc - mx2) + my2;
}
else if (delta_y2 < EPSILON) {
m1 = -((p2.x - p1.x) / (p2.y - p1.y));
mx1 = (p1.x + p2.x) * 0.5;
my1 = (p1.y + p2.y) * 0.5;
xc = (p3.x + p2.x) * 0.5;
yc = m1 * (xc - mx1) + my1;
}
else {
m1 = -((p2.x - p1.x) / (p2.y - p1.y));
m2 = -((p3.x - p2.x) / (p3.y - p2.y));
mx1 = (p1.x + p2.x) * 0.5;
mx2 = (p2.x + p3.x) * 0.5;
my1 = (p1.y + p2.y) * 0.5;
my2 = (p2.y + p3.y) * 0.5;
xc = (m1 * mx1 - m2 * mx2 + my2 - my1) / (m1 - m2);
yc = (delta_y1 > delta_y2) ? m1 * (xc - mx1) + my1 : m2 * (xc - mx2) + my2;
}
dx = p2.x - xc;
dy = p2.y - yc;
circumcircle.center.x = xc;
circumcircle.center.y = yc;
circumcircle.center.z = 0;
circumcircle.r = dx * dx + dy * dy;
return circumcircle;
}
void removeEdge(std::list<int>& edge) {
int a = -1, b = -1, c = -1, d = -1;
for (auto it = edge.end(); it != edge.begin(); )
{
a = *(--it);
b = *(--it);
for (auto it2 = it; it2 != edge.begin();) {
c = *(--it2);
d = *(--it2);
if ((a == c && b == d) || (a == d && b == c)) {
it = edge.erase(it); it = edge.erase(it);
it2 = edge.erase(it2); it2 = edge.erase(it2);
break;
}
}
}
return;
}
bool equals(Edges& e1, Edges& e2) {
if (e1.p1 == e2.p1 && e1.p2 == e2.p2) return true;
if (e1.p1 == e2.p2 && e1.p2 == e2.p1)return true;
return false;
}
std::vector<int> delaunayTransform(PointCloudT::Ptr ptr) {
std::vector<int> res;
if (ptr->size() < 3) return res;
int amount = ptr->size();
std::vector<int> indices(amount);
for (int i = 0; i < amount; ++i) indices[i] = i;
sort(indices.begin(), indices.end(), [ptr](int i, int j)->int {
return ptr->points[j].x != ptr->points[i].x ? (ptr->points[j].x < ptr->points[i].x) : (i - j > 0 ? 0 : 1);
});
Triangle triangle = getSuperTranigle(ptr);
TriangleIndex ti = { amount ,amount + 1,amount + 2 };
ptr->points.emplace_back(triangle.pa); ptr->points.emplace_back(triangle.pb); ptr->points.emplace_back(triangle.pc);
Circumcircle cir = getCircumcircle(ptr, ti);
std::list<Circumcircle> open = { cir };
std::list<Circumcircle>closed = {};
std::list<int> edge = {};
int m = 0;
float dx = 0, dy = 0;
for (int i = indices.size(); i;) {
m = indices[--i];
edge.clear();
for (auto j = open.end(); j != open.begin();) {
--j;
dx = ptr->points[m].x - j->center.x;
if (dx > 0.0 && dx * dx > j->r) {
closed.emplace_back(*j);
j = open.erase(j);
continue;
}
dy = ptr->points[m].y - j->center.y;
if (dx * dx + dy * dy - j->r > EPSILON) continue;
edge.emplace_back(j->index.pa);
edge.emplace_back(j->index.pb);
edge.emplace_back(j->index.pb);
edge.emplace_back(j->index.pc);
edge.emplace_back(j->index.pc);
edge.emplace_back(j->index.pa);
j = open.erase(j);
}
removeEdge(edge);
for (auto j = edge.end(); j != edge.begin();) {
ti.pb = *(--j);
ti.pa = *(--j);
ti.pc = m;
open.emplace_back(getCircumcircle(ptr, ti));
}
}
closed.insert(closed.end(), open.begin(), open.end());
ptr->points.pop_back(); ptr->points.pop_back(); ptr->points.pop_back();
for (auto j = closed.end(); j != closed.begin(); ) {
--j;
if (j->index.pa < amount && j->index.pb < amount && j->index.pc < amount) {
res.emplace_back(j->index.pa);
res.emplace_back(j->index.pb);
res.emplace_back(j->index.pc);
}
}
std::vector<int> edges;
int a = -1, b = -1, c = -1;
int pa = -1, pb = -1, pc = -1;
Edges e[4];
for (int i = res.size(); i;) {
a = res[--i];
b = res[--i];
c = res[--i];
e[0] = { a,b };
e[1] = { b,c };
e[2] = { c,a };
pa = -1, pb = -1, pc = -1;
for (int j = edges.size(); j;) {
e[3] = { edges[--j],edges[--j] };
if (pa == -1 && equals(e[0], e[3])) pa = j;
if (pb == -1 && equals(e[1], e[3])) pb = j;
if (pc == -1 && equals(e[2], e[3])) pc = j;
}
if (pa == -1) { edges.emplace_back(a); edges.emplace_back(b); }
if (pb == -1) { edges.emplace_back(b); edges.emplace_back(c); }
if (pc == -1) { edges.emplace_back(c); edges.emplace_back(a); }
}
return edges;
}














 2299
2299











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









