






第一课 移动机器人运动规划
Motion planning for mobile robots
- Introduction
- Course outline
- Typical planning methods overview
- Map representation:地图表达,与图片环节对接起来
- Pre-requirement
- homework
1、about this course
old school planning pipeline :模块化
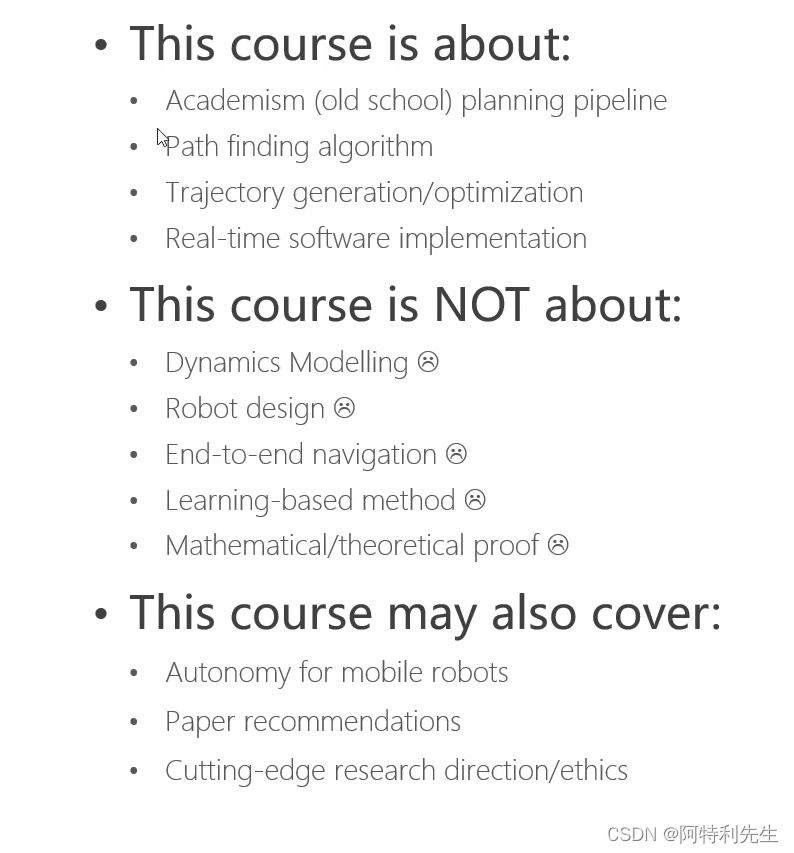
寻迹算法,轨迹生成\优化,实时软件开发
Basic expectation
实用第一
Basic algorithm validation(matlab)
Sophisticated engineering implementation (ros\c++)
What is autonomous robot???
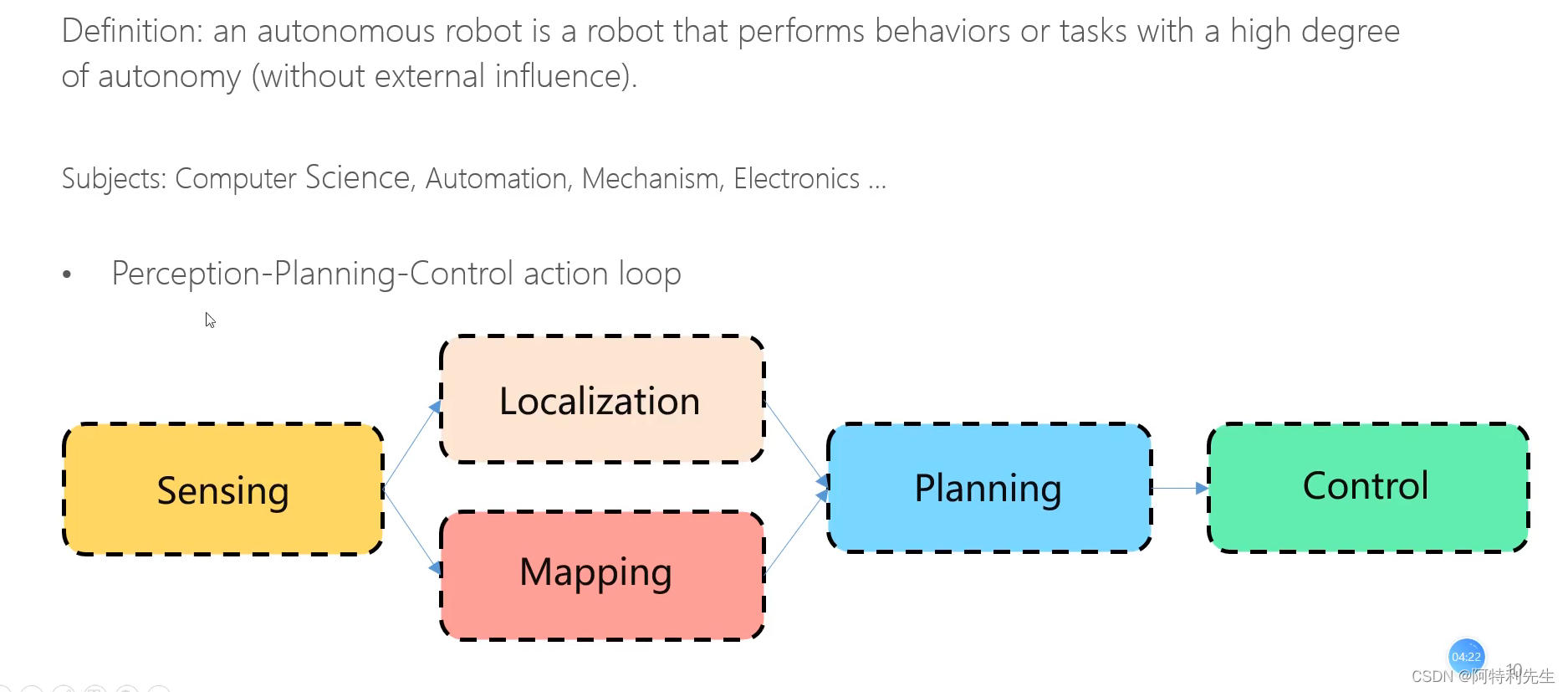
估计
低延时
高准确性和一致性
感知
三维感知和密集感知
用于规划的地图融合和集成
规划
复杂未知环境
安全性和动力可行性
有限的传感和计算
控制
积极的机动
平滑的轨迹跟踪
What is motion planning
基础要求:
安全:避免碰撞
光滑性:节能、舒适
运动动力学可行性:可执行、可控
Old-school pipeline
前端寻迹
搜索初始安全路径
低维
离散空间
后端轨迹生成
搜索可执行路径
高维
连续空间
How to do robotics research???
Find a problem
Solve a problem
简单而有效
Simulation tells nothing!!!
How to do motion planning???
Overall knowledge of planning
根据不同的场景选择合适的方法
设计定制策略
Dirty hands
Know the whole system well
感知,定位,控制,机械设计
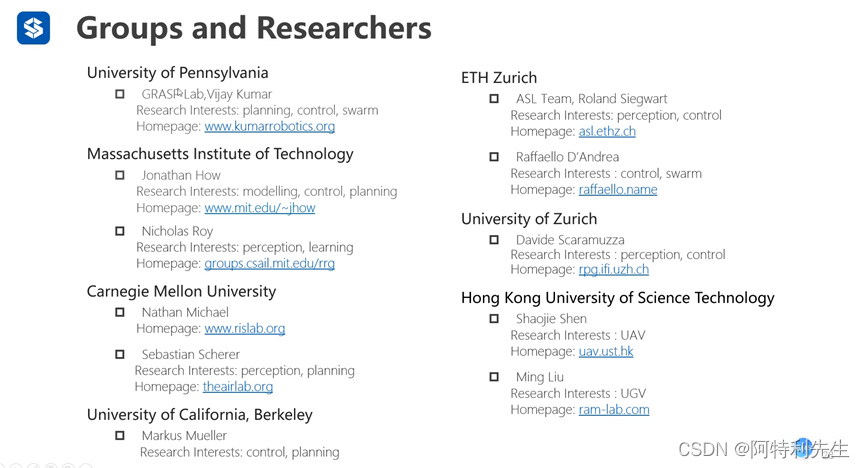
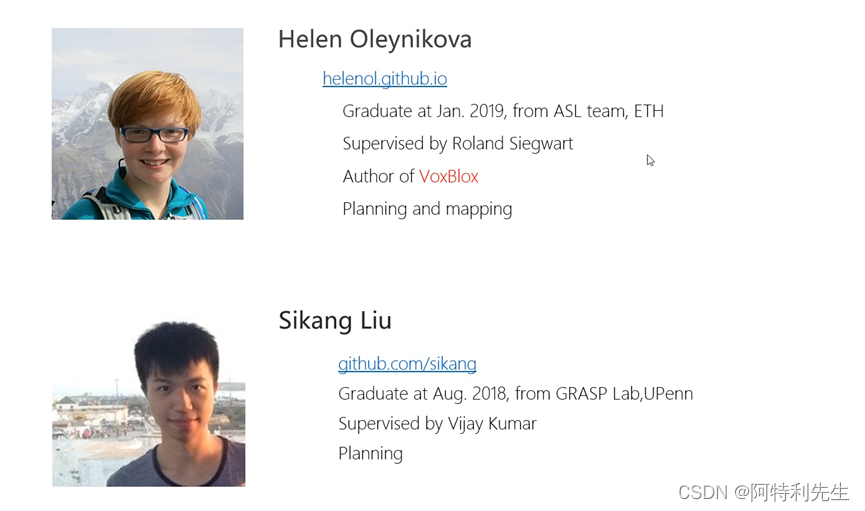
推荐资料:
2、Course Outline
1 front-end: path finding
基于搜索的路径规划
图形搜索基础
Dijkstra和A*
跳跃点搜索
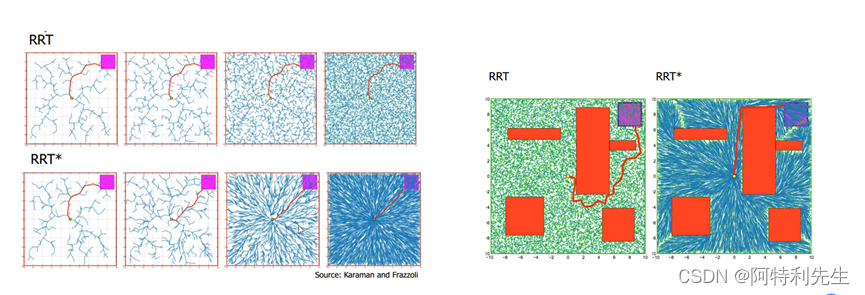
基于采样的路径规划
概率路线图
快速搜索随机树(RRT)
基于最优抽样的方法
高级抽样方法
运动动力学寻迹
简介
状态—状态边界值最优控制问题
状态格搜索
Kinodynamic RRT*
Hybrid A*
Back-end: trajectory generation 后端:轨迹生成
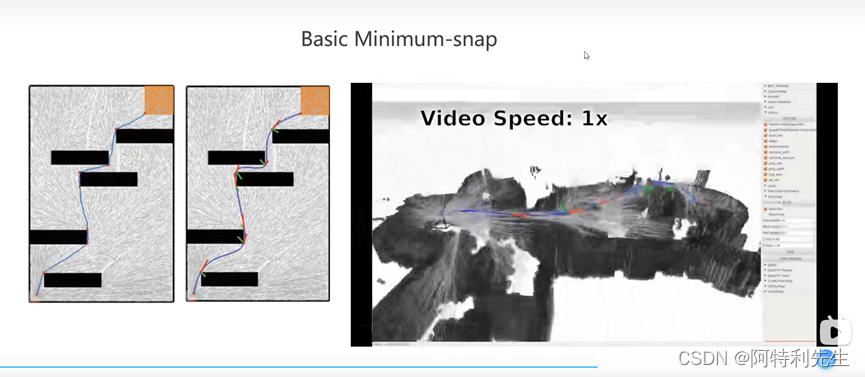
最小快速轨迹生成
微分平坦
最小瞬间优化
最小瞬间的封闭解
时间分配
Implementation in practice
软硬约束策略优化
软约束策略优化
硬约束策略优化
MDP&MPC
基于马尔代夫决策过程的规划
规划和MDP中的不确定性
最大成本和最小成本规划和期望最小规划
数值迭代和实时动态规划
机器人规划的模型预测控制
简介
线性MPC
非线性MPC
3、Sampling-based method
RRT* vs RRT
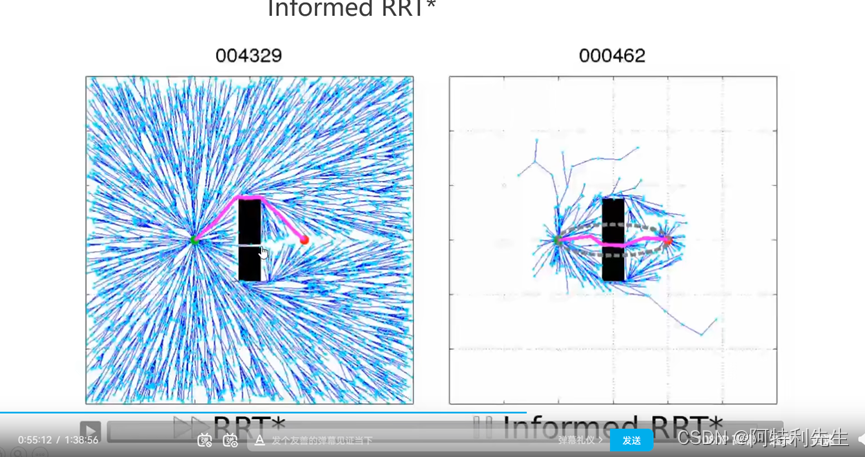
Informed RRT* 有启发式的算法:提升最优解
Kinodynamic path finding :考虑动力学
State lattice search
Hybrid A* 扩展A*算法
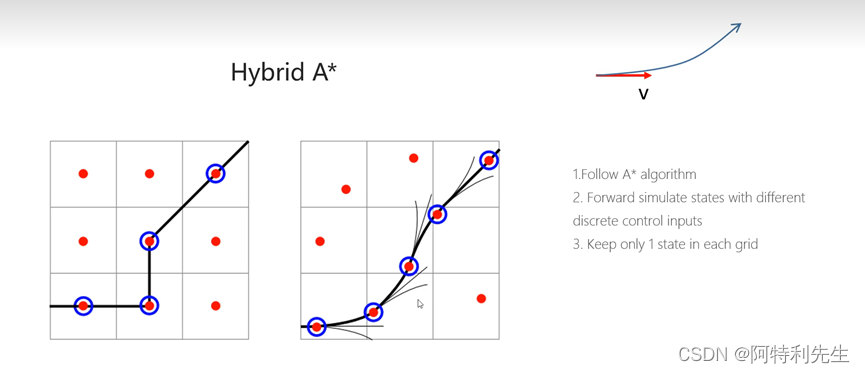
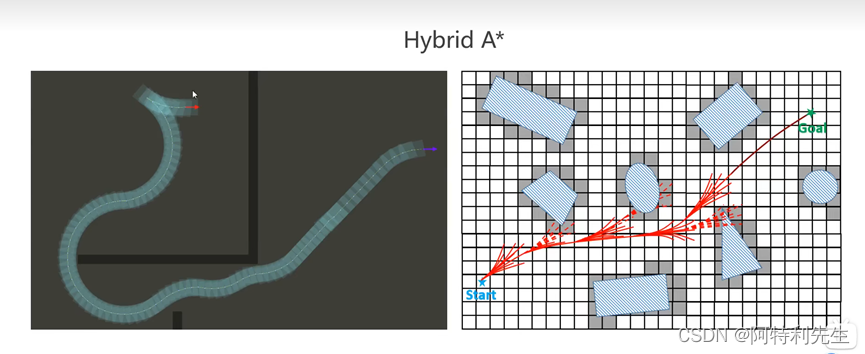
考虑动力学的路径搜索问题
Kinodynamic RRT*: 基于随机采样
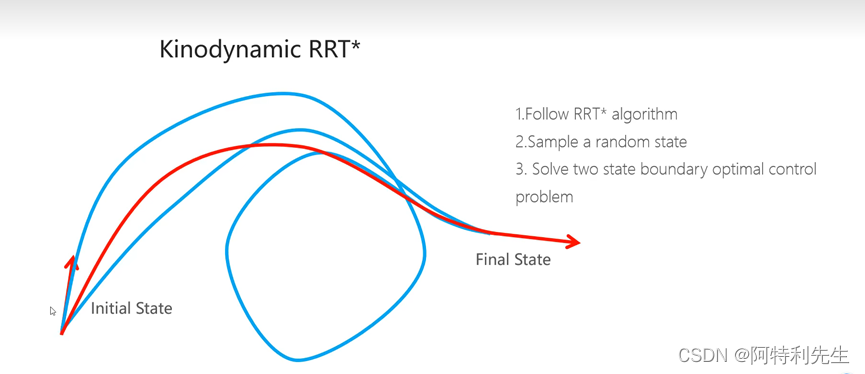
离散状态
Back-end: trajectory optimization
Basic minimum-snap
Hard constrained minimum-snap : 硬约束下,解空间
Soft constrained minimum-snap:梯度

4、mapping
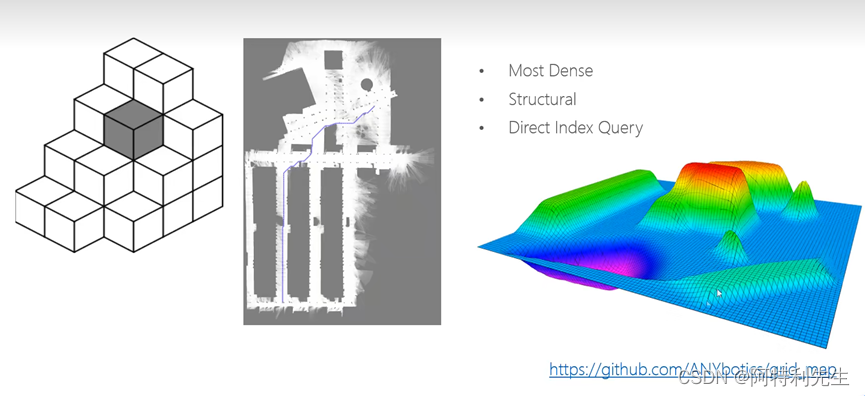
Occupancy grid map :栅格地图
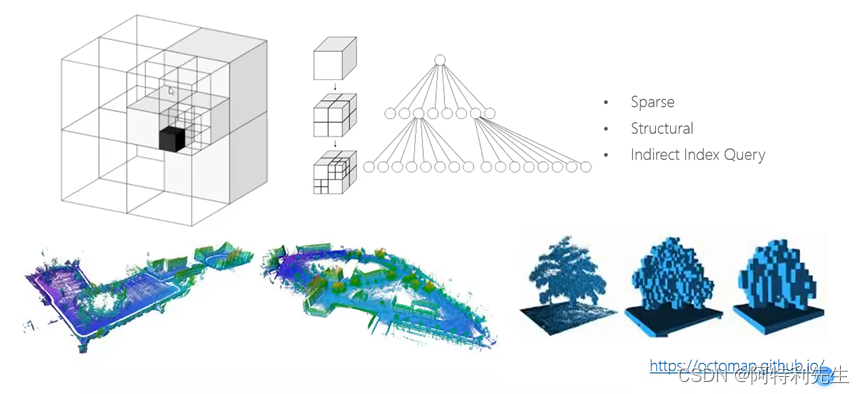
Octo-map:八叉树,内存占用少,激光雷达地图
Voxel hashing

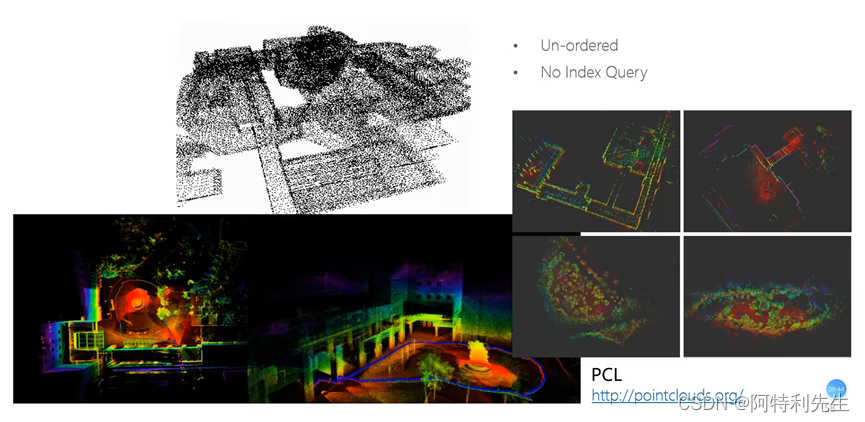
Point cloud map:点云
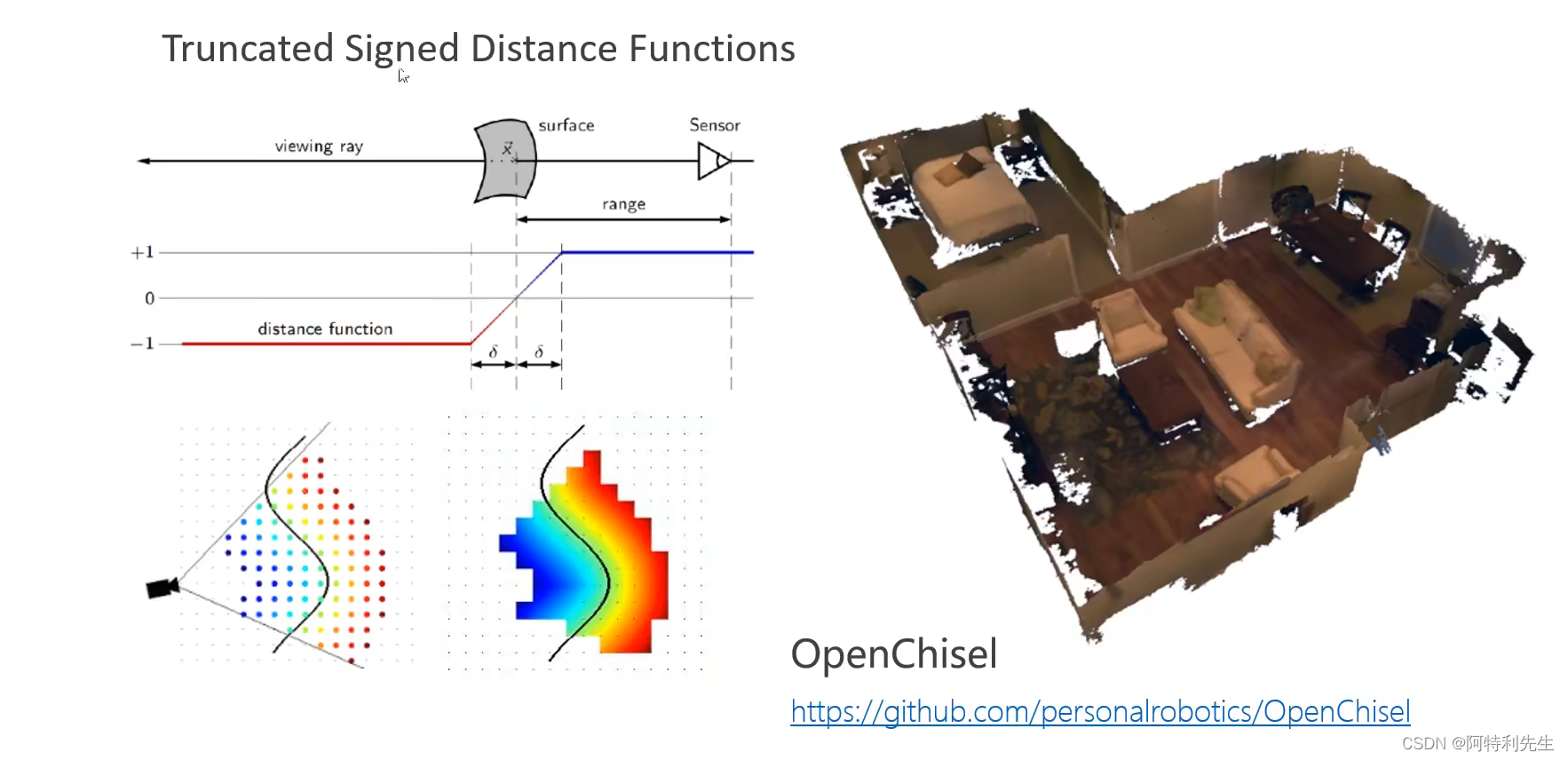
TSDF map
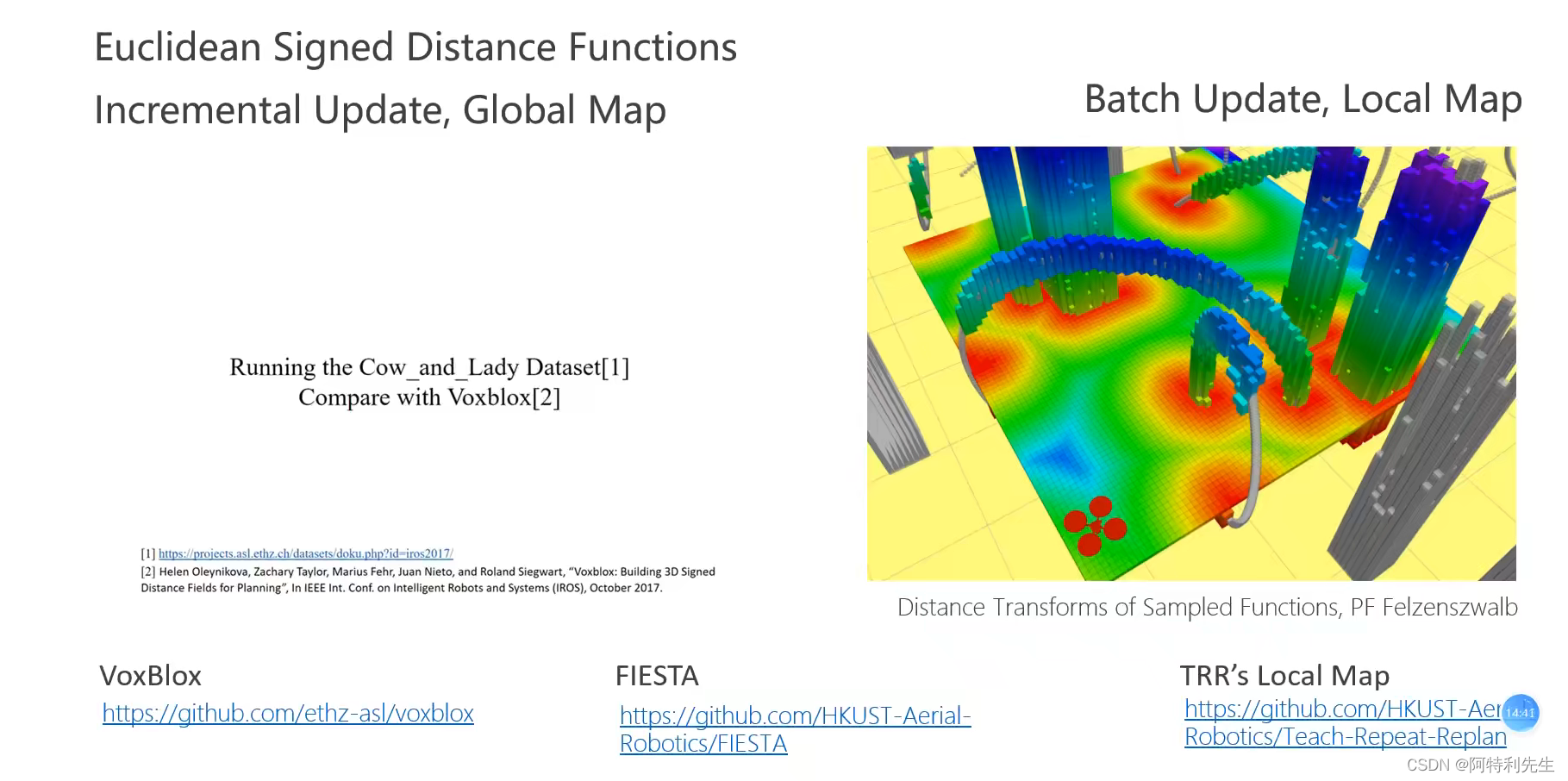
ESDF map
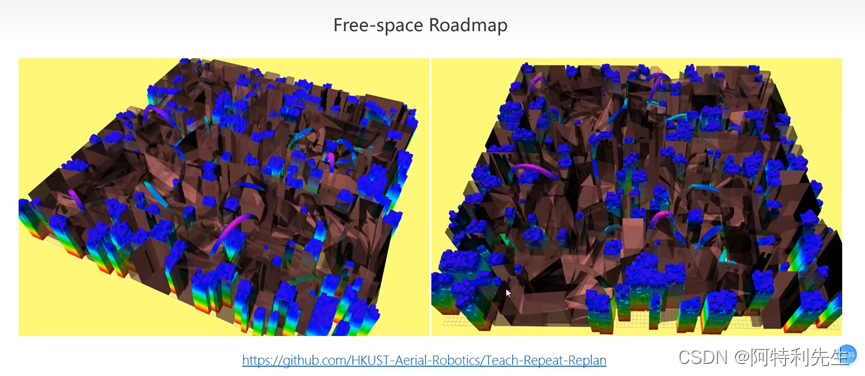
More ??? free-space roadmap
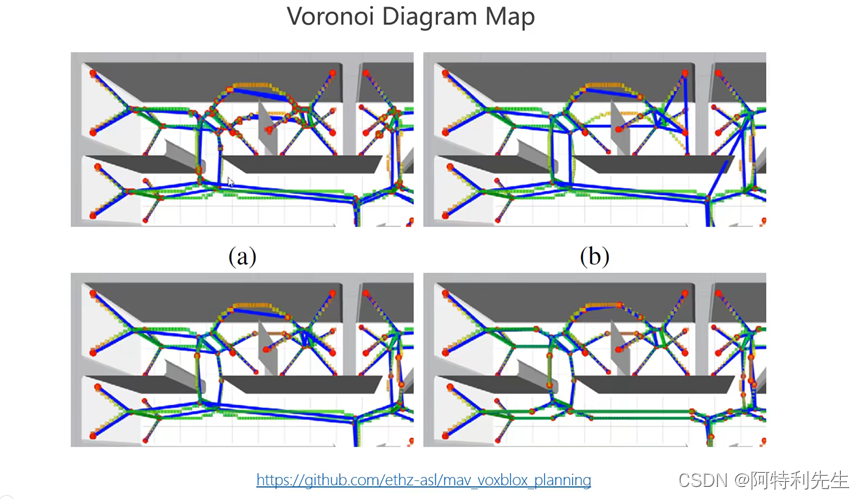
Voronoi diagram map:拓扑地图
5、Pre-requirement
1\linux
Linux file system
How to install software in linux
Useful commands
2\c++ and GCC toolchain
C with class?
Gcc, makefile, cmakelist
Write cmakelist
How to solve problems: google and document.
3\matlab

















 1114
1114

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









