






深蓝学院-高飞老师 移动机器人规划笔记 动力学约束下的路径规划
传送门
【L3】深蓝学院-高飞老师 移动机器人规划笔记 基于采样的最优路径规划算法&进阶
【L2】深蓝学院-高飞老师 移动机器人规划笔记 基于搜索的路径规划
【L1】深蓝学院-高飞老师 移动机器人规划笔记
前言
Q1: 首先,为什么要kinodynamic呢,也就是考虑运动学和动力学(后续简称为动力学)呢?
因为在现实世界中的机器人,他们是有自己的运动模型的,仅仅将他们转化为质点考虑运动路径肯定是有失偏颇的。
Q2: 当然,前面其实提到过,在整个pipeline中,还有后端做轨迹优化的部分,会考虑到机器人的动力学,那在前端为什么要考虑动力学这个事情呢?
简单来讲,这样去做可以降低后续后端路径优化的负担。而且,后端优化的时候,往往都是在局部进行优化,如果前端完全不考虑动力学的话,可能会产生对于机器人来说动力学代价更大的路径。
小例子
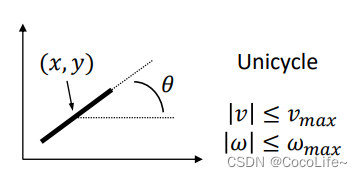
自行车
一般比较简单,输入就是速度和角速度,
(
x
˙
y
˙
θ
˙
)
=
(
cos
θ
sin
θ
0
)
⋅
v
+
(
0
0
1
)
⋅
ω
\left(\begin{array}{c}\dot{x} \\ \dot{y} \\ \dot{\theta}\end{array}\right)=\left(\begin{array}{c}\cos \theta \\ \sin \theta \\ 0\end{array}\right) \cdot v+\left(\begin{array}{l}0 \\ 0 \\ 1\end{array}\right) \cdot \omega
x˙y˙θ˙
=
cosθsinθ0
⋅v+
001
⋅ω
约束就是速度和角速度的最大值,
差速驱动机器人
(
x
˙
y
˙
θ
˙
)
=
(
r
2
(
u
l
+
u
r
)
cos
θ
r
2
(
u
l
+
u
r
)
sin
θ
r
L
(
u
r
−
u
l
)
)
\left(\begin{array}{c}\dot{x} \\ \dot{y} \\ \dot{\theta}\end{array}\right)=\left(\begin{array}{c}\frac{r}{2}\left(u_l+u_r\right) \cos \theta \\ \frac{r}{2}\left(u_l+u_r\right) \sin \theta \\ \frac{r}{L}\left(u_r-u_l\right)\end{array}\right)
x˙y˙θ˙
=
2r(ul+ur)cosθ2r(ul+ur)sinθLr(ur−ul)
类似的约束,
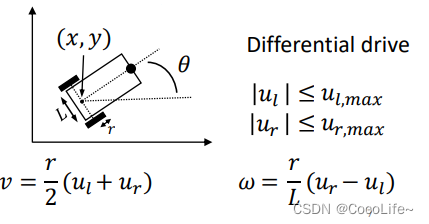
这几个比较经典的动力学模型网上的教学还比较多,随便挂一个差速驱动和自行车模型的二维运动学模型。
方法
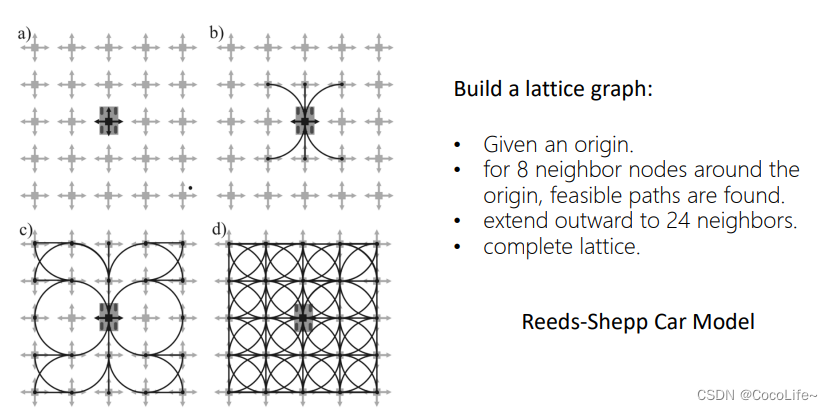
状态栅格搜索算法:State Lattice Search
前面的基于采样的、基于图搜索的方法都有一个共同需要关注的问题,那就是搜索树的构建问题,然后就可以用各类的图搜索的方法解决问题。但是在之前的方法中,我们都默认机器人是一个质点,它可以向各个方向移动,但是现在就需要一个节点之间的可以给机器人进行执行的feasible motion connection 而不是之前的直接连接。
有两种思路去实现这样的建图(边):
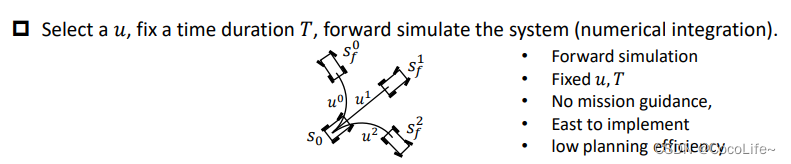
- 正向-离散化控制空间:驱动机器人运动得到feasible motion connection。
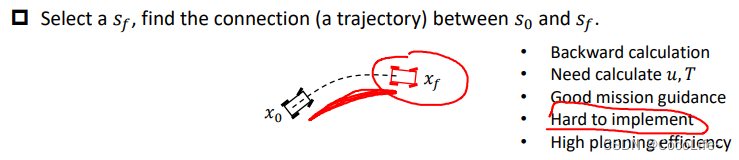
- 反向-离散化状态空间:找到机器人周围的很多个状态,找到当前状态到某个状态的连接。
对于一个机器人的运动模型: s ˙ = f ( s , u ) \dot{s}=f(s, u) s˙=f(s,u),即状态s的导数是一个由状态和输入为变量去描述的函数。一般会给一个初始状态 s 0 s_0 s0。
对应上面的两种思路,
- 离散化控制空间:给系统不同的u,并保持一定的时间,看系统在不同的激励下会变成什么样子。前向仿真,易于实现,有点类似djisktra算法,没有目的性的扩展,容易造成较低的效率。
- 离散化状态空间:给定状态,从两个状态之间解析运动的边(解出u和T),看什么样的u和T能让机器人从一个状态到另外一个状态。反向的计算,比较难实现,但是自然地具备heuristic的效果。
在控制空间采样的示例
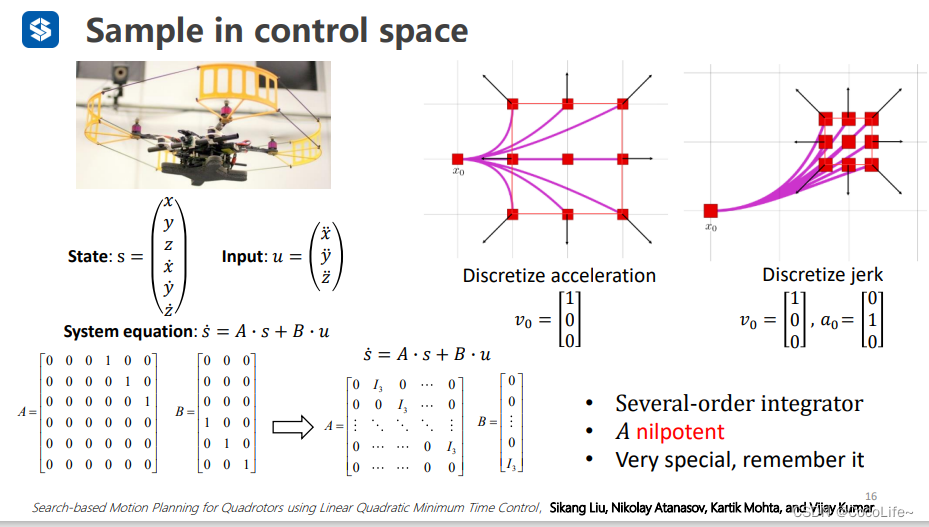
用位置和速度作为状态
s
s
s,用加速度作为输入
u
u
u,构成一个线性系统方程:
s
˙
=
A
⋅
s
+
B
⋅
u
\dot{s}=A \cdot s+B \cdot u
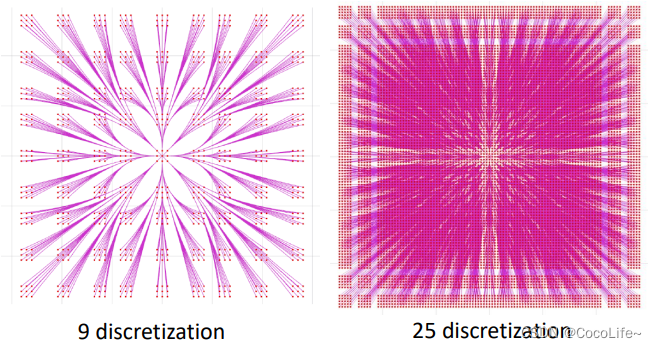
s˙=A⋅s+B⋅u。(再往高阶的话,也可以用三阶导jerk作为输入,状态填入加速度的三个维度)。中间的图即表明了,在以加速度为输入的情况下,以[1,0,0]作为初速度,选取不同加速度后经时间t后得到的离散的控制空间的点。右边的图就是用jerk作输入的结果。不断进行这个过程就会得到lattice graph,如下所示,但是其实不用把整个lattice graph建完再搜索路径(因为这个图与前面用的已经构建好的栅格图不一样,这个图最开始是没有的),可以利用heuristic函数类似的思路去提高效率。
需要注意一下,上面系统方程中的A矩阵,叫做nilpotent,即幂零矩阵,这个矩阵的性质很适合去除展开式里的高次项,方便我们求解。
具体来说,给定sample后,可以根据系统方程输入计算最后的末状态(给定输入和时间),驱动系统向前前进,那怎么确定中间的轨迹呢?这就涉及到了如下的状态转移方程:
s
(
t
)
=
e
A
t
⏟
F
(
t
)
s
0
+
[
∫
0
t
e
A
(
t
−
σ
)
B
d
σ
]
⏟
G
(
t
)
u
m
s(t)=\underbrace{e^{A t}}_{F(t)} s_0+\underbrace{\left[\int_0^t e^{A(t-\sigma)} B d \sigma\right]}_{G(t)} u_m
s(t)=F(t)
eAts0+G(t)
[∫0teA(t−σ)Bdσ]um
简单来讲,就是状态 s s s随时间变化的函数,是与初状态和整个过程中选取的控制量有关的。前半项是零输入响应,后半项是零状态响应。如果给定时刻 t t t,一般对 e A t e^{A t} eAt做展开计算, e A t = I + A t 1 ! + ( A t ) 2 2 ! + ( A t ) 3 3 ! + ⋯ + ( A t ) k k ! + ⋯ e^{A t}=I+\frac{A t}{1 !}+\frac{(A t)^2}{2 !}+\frac{(A t)^3}{3 !}+\cdots+\frac{(A t)^k}{k !}+\cdots eAt=I+1!At+2!(At)2+3!(At)3+⋯+k!(At)k+⋯,这样A矩阵作为幂零矩阵就很有作用了。
对上述的整个过程举一个简单的小车模型的例子,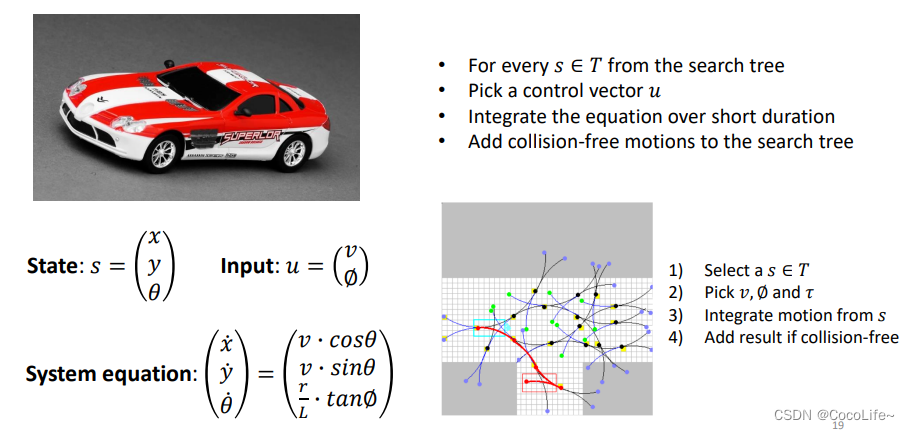
在状态空间采样的示例
如下图所示,给定一个初始的状态,先离散出他周围临近的状态,然后反推状态之间的可行性路径。
下面图展现了,两者比较直观的对比,
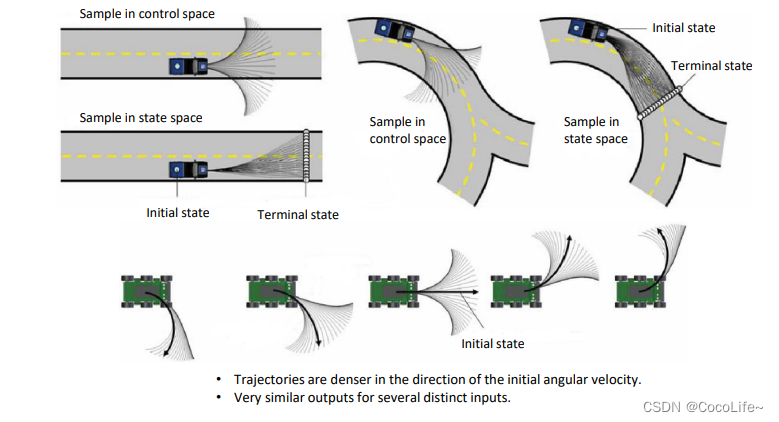
看起来,状态空间采样的方法要好一些,因为不会出现那些失败的路径。而且如果控制空间的输入变化的范围控制不好的话,可能会导致一系列的路径都容易是失败的,因为他们比较接近。那为什么不完全使用状态空间采样的方法呢,原因在于其实现的难度。下面介绍一下,已知起点终点状态,怎么去解中间的可行路径的一个方法。
Boundary Value Problem (BVP)
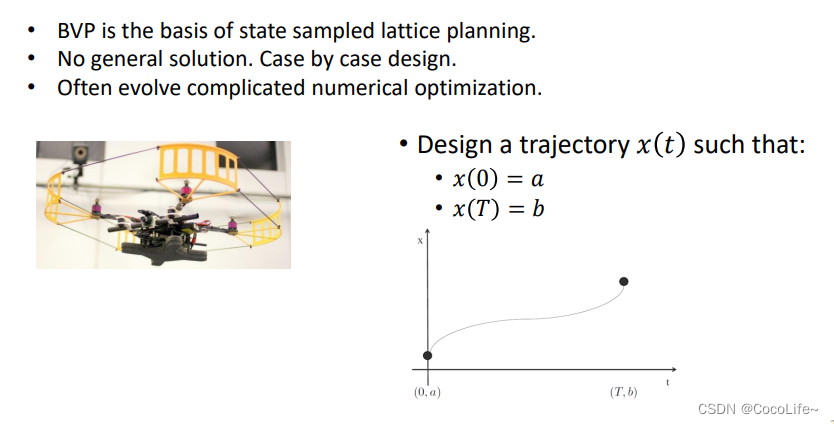
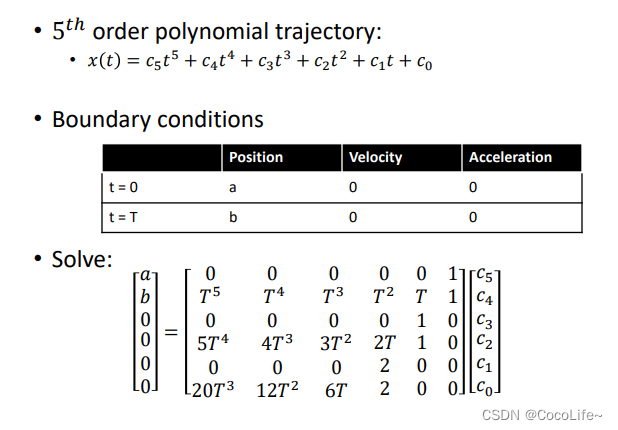
比如,以x轴方向为例,可以用多项式做参数化,
以上可能有很多解,因为限制条件比较少,获得一个解相对而言比较容易,但是获得比较优的解还需要其他的方法。
Optimal Boundary Value Problem (OBVP)
任务:给定初始和终点两个状态,我们想要去找到中间的最优
s
∗
s^*
s∗和
u
∗
u^*
u∗。
- 目标函数:
J
Σ
=
∑
k
=
1
3
J
k
,
J
k
=
1
T
∫
0
T
j
k
(
t
)
2
d
t
J_{\Sigma}=\sum_{k=1}^3 J_k, J_k=\frac{1}{T} \int_0^T j_k(t)^2 d t
JΣ=∑k=13Jk,Jk=T1∫0Tjk(t)2dt
这个目标函数描述的是:首先,将三维的运动的任务分解为单独一个维度再一起考虑,然后每一个维度考虑的是一段时间T内jerk的平均变化程度,这里平方是因为jerk自身表示加速度的导数,有正有负。 - 状态: s k = ( p k , v k , a k ) s_k=\left(p_k, v_k, a_k\right) sk=(pk,vk,ak),状态某一个维度上的位置、速度以及加速度
- 输入: u k = j k u_k=j_k uk=jk,输入为加速度的导数jerk
- 系统方程: s ˙ = f s ( s , u ) = ( v , a , j ) \dot{s}=f_s(s, u)=(v, a, j) s˙=fs(s,u)=(v,a,j)
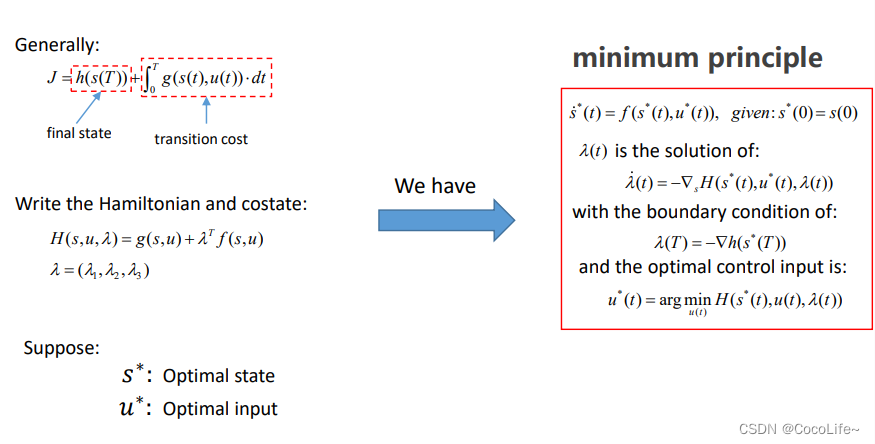
这里以庞特里亚金极小值定理为例展现整个计算的过程,
- 首先根据系统方程中变量的个数,需要定义协态 λ = ( λ 1 , λ 2 , λ 3 ) \lambda=\left(\lambda_1, \lambda_2, \lambda_3\right) λ=(λ1,λ2,λ3)
- 而后构造汉密尔顿函数
H ( s , u , λ ) = 1 T j 2 + λ T f s ( s , u ) = 1 T j 2 + λ 1 v + λ 2 a + λ 3 j \begin{aligned} H(s, u, \lambda) & =\frac{1}{T} j^2+\lambda^T f_s(s, u) \\ & =\frac{1}{T} j^2+\lambda_1 v+\lambda_2 a+\lambda_3 j\end{aligned} H(s,u,λ)=T1j2+λTfs(s,u)=T1j2+λ1v+λ2a+λ3j - 极小值定理做的事情,就是协变量
λ
\lambda
λ是如下方程的解:
λ ˙ ( t ) = − ∇ s H ( s ∗ ( t ) , u ∗ ( t ) , λ ( t ) ) \dot{\lambda}(t)=-\nabla_s H\left(s^*(t), u^*(t), \lambda(t)\right) λ˙(t)=−∇sH(s∗(t),u∗(t),λ(t))
即汉密尔顿函数在状态与输入都是最优的情况下对状态求的偏导数。公式表示 λ ( t ) \lambda(t) λ(t) 的时间导数等于汉密尔顿函数在最优状态、最优控制和当前伴随变量下对状态的梯度的相反数。边界条件: λ ( T ) = − ∇ h ( s ∗ ( T ) ) \lambda(T)=-\nabla h\left(s^*(T)\right) λ(T)=−∇h(s∗(T)),表示控制最后的时刻对末状态的惩罚。
通过这种方式最优控制量: u ∗ ( t ) = arg min u ( t ) H ( s ∗ ( t ) , u ( t ) , λ ( t ) ) u^*(t)=\arg \min _{u(t)} H\left(s^*(t), u(t), \lambda(t)\right) u∗(t)=argminu(t)H(s∗(t),u(t),λ(t)),即在找到最优的 s ∗ s^* s∗,后怎么找到最优的输入 u ∗ u^* u∗,使得汉密尔顿函数最小。 - 根据
λ
˙
(
t
)
=
−
∇
s
H
(
s
∗
(
t
)
,
u
∗
(
t
)
,
λ
(
t
)
)
\dot{\lambda}(t)=-\nabla_s H\left(s^*(t), u^*(t), \lambda(t)\right)
λ˙(t)=−∇sH(s∗(t),u∗(t),λ(t))与本例中的汉密尔顿函数:
可以求出 λ ˙ = − ∇ s H ( s ∗ , u , λ ) = ( 0 , − λ 1 , − λ 2 ) \dot{\lambda}=-\nabla_s H\left(s^*, u, \lambda\right)=\left(0,-\lambda_1,-\lambda_2\right) λ˙=−∇sH(s∗,u,λ)=(0,−λ1,−λ2),即汉密尔顿函数对位置、速度、加速度的偏导数,再加个负号。 - 根据
λ
˙
\dot{\lambda}
λ˙,求出
λ
\lambda
λ的一组解,
λ ( t ) = 1 T [ − 2 α 2 α t + 2 β − α t 2 − 2 β t − 2 γ ] \lambda(t)=\frac{1}{T}\left[\begin{array}{c}-2 \alpha \\ 2 \alpha t+2 \beta \\ -\alpha t^2-2 \beta t-2 \gamma\end{array}\right] λ(t)=T1 −2α2αt+2β−αt2−2βt−2γ ,因为本例中没有施加终末状态的软约束,是强制的必须让系统达到最后的状态,所以这个求解所需的边界条件即是我们规定的最后的状态。 - 现在我们利用得到的
λ
\lambda
λ去计算最优控制量,
u
∗
(
t
)
=
j
∗
(
t
)
=
arg
min
j
(
t
)
H
(
s
∗
(
t
)
,
j
(
t
)
,
λ
(
t
)
)
=
1
2
α
t
2
+
β
t
+
γ
\begin{aligned} u^*(t) & =j^*(t)=\arg \min _{j(t)} H\left(s^*(t), j(t), \lambda(t)\right) \\ & =\frac{1}{2} \alpha t^2+\beta t+\gamma\end{aligned}
u∗(t)=j∗(t)=argj(t)minH(s∗(t),j(t),λ(t))=21αt2+βt+γ
这里就是把协态的那一组解,带入汉密尔顿函数,然后对jerk做偏导,得到极值点对应的j的值。需要注意的是,由于s已经取到optimal了,其中的v和a其实也已经固定了,所以求偏导的时候不需要管他们了。 - jerk得到最优了之后,其实最优的s就可以得到了,因为p,v,a其实就是jerk一次次向上的积分。再加上初始的边界条件
s
(
0
)
=
(
p
0
,
v
0
,
a
0
)
s(0)=\left(p_0, v_0, a_0\right)
s(0)=(p0,v0,a0),即可得到状态的最优解:
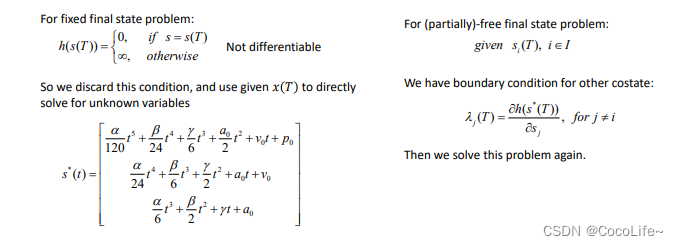
s ∗ ( t ) = [ α 120 t 5 + β 24 t 4 + γ 6 t 3 + a 0 2 t 2 + v 0 t + p 0 α 24 t 4 + β 6 t 3 + γ 2 t 2 + a 0 t + v 0 α 6 t 3 + β 2 t 2 + γ t + a 0 ] s^*(t)=\left[\begin{array}{c}\frac{\alpha}{120} t^5+\frac{\beta}{24} t^4+\frac{\gamma}{6} t^3+\frac{a_0}{2} t^2+v_0 t+p_0 \\ \frac{\alpha}{24} t^4+\frac{\beta}{6} t^3+\frac{\gamma}{2} t^2+a_0 t+v_0 \\ \frac{\alpha}{6} t^3+\frac{\beta}{2} t^2+\gamma t+a_0\end{array}\right] s∗(t)= 120αt5+24βt4+6γt3+2a0t2+v0t+p024αt4+6βt3+2γt2+a0t+v06αt3+2βt2+γt+a0
当然,这里面的系数还没有定,这时候就要用到终点的边界条件 s f s_f sf去确认了。
整理之后,
[ 1 120 T 5 1 24 T 4 1 6 T 3 1 24 T 4 1 6 T 3 1 2 T 2 1 6 T 3 1 2 T 2 T ] [ α β γ ] = [ Δ p Δ v Δ a ] \left[\begin{array}{lll}\frac{1}{120} T^5 & \frac{1}{24} T^4 & \frac{1}{6} T^3 \\ \frac{1}{24} T^4 & \frac{1}{6} T^3 & \frac{1}{2} T^2 \\ \frac{1}{6} T^3 & \frac{1}{2} T^2 & T\end{array}\right]\left[\begin{array}{l}\alpha \\ \beta \\ \gamma\end{array}\right]=\left[\begin{array}{c}\Delta p \\ \Delta v \\ \Delta a\end{array}\right] 1201T5241T461T3241T461T321T261T321T2T αβγ = ΔpΔvΔa
其中, [ Δ p Δ v Δ a ] = [ p f − p 0 − v 0 T − 1 2 a 0 T 2 v f − v 0 − a 0 T a f − a 0 ] \left[\begin{array}{c}\Delta p \\ \Delta v \\ \Delta a\end{array}\right]=\left[\begin{array}{c}p_f-p_0-v_0 T-\frac{1}{2} a_0 T^2 \\ v_f-v_0-a_0 T \\ a_f-a_0\end{array}\right] ΔpΔvΔa = pf−p0−v0T−21a0T2vf−v0−a0Taf−a0 ,
最后即可解得, [ α β γ ] = 1 T 5 [ 720 − 360 T 60 T 2 − 360 T 168 T 2 − 24 T 3 60 T 2 − 24 T 3 3 T 4 ] [ Δ p Δ v Δ a ] \left[\begin{array}{l}\alpha \\ \beta \\ \gamma\end{array}\right]=\frac{1}{T^5}\left[\begin{array}{ccc}720 & -360 T & 60 T^2 \\ -360 T & 168 T^2 & -24 T^3 \\ 60 T^2 & -24 T^3 & 3 T^4\end{array}\right]\left[\begin{array}{c}\Delta p \\ \Delta v \\ \Delta a\end{array}\right] αβγ =T51 720−360T60T2−360T168T2−24T360T2−24T33T4 ΔpΔvΔa 。
带入计算目标函数 J J J: J = γ 2 + β γ T + 1 3 β 2 T 2 + 1 3 α γ T 2 + 1 4 α β T 3 + 1 20 α 2 T 4 J=\gamma^2+\beta \gamma T+\frac{1}{3} \beta^2 T^2+\frac{1}{3} \alpha \gamma T^2+\frac{1}{4} \alpha \beta T^3+\frac{1}{20} \alpha^2 T^4 J=γ2+βγT+31β2T2+31αγT2+41αβT3+201α2T4,最后得到的结果应该只跟 T T T相关了,通过求 J J J的极值也可以求出最优的 T T T。
终点边界条件可以完全fix也可以部分fix:
启发式设计
从状态空间采样搜索路径的方法不具备启发式函数,也就是漫无目的的去搜索。结合之前几个章节的启发式函数的内容,在这里同样可以引入heuristic。
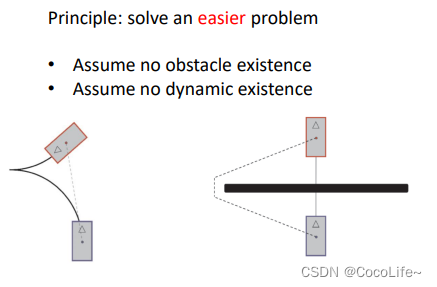
当然在这里有两种假设:
- 假设没有障碍物存在
- 假设没有动力学存在
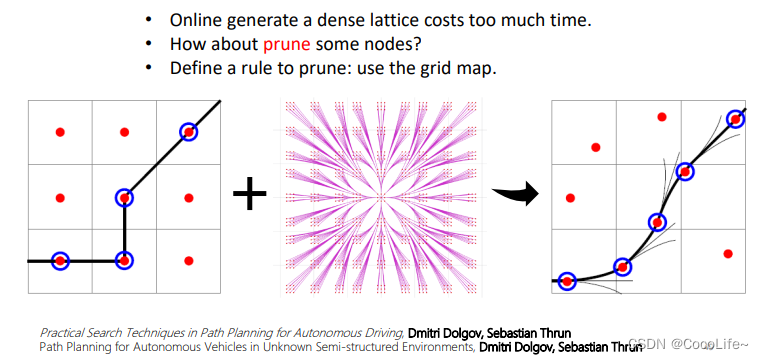
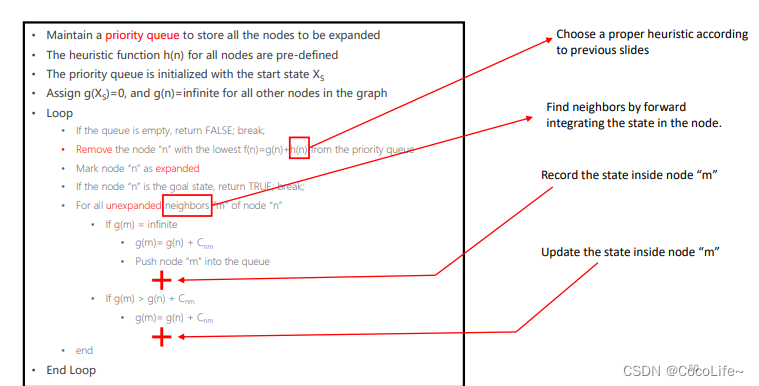
Hybrid A*
思路:A* + lattice graph,对比较稠密的图进行剪枝(栅格地图每一个格子里只要一个状态),跟A*的思路一样,区别就是邻居节点的选择是选择相邻的一些邻状态点,然后启发式函数的选择有一些区别。
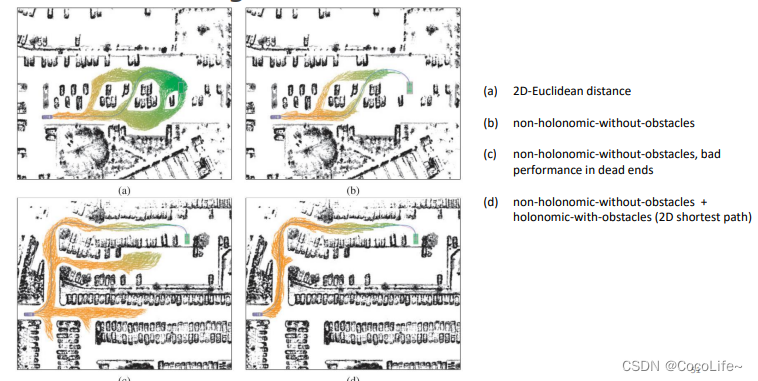
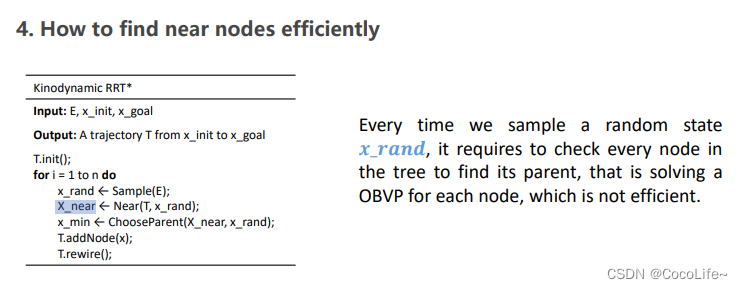
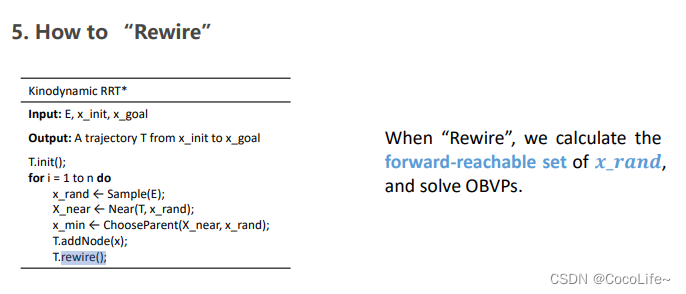
Kinodynamic RRT*
上面介绍了基于搜索的算法,接下来介绍一个基于采样的运动学约束的path finding方法
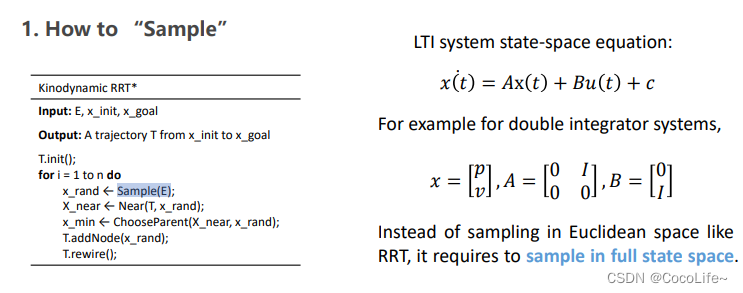
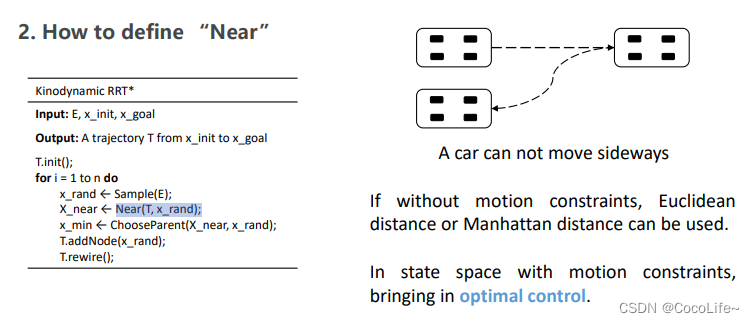
其实思路差不多,就是在采样点之间生成路径的时候不是直连了,而是通过初始状态解出运动学约束的路径,当然他这里的求解方式跟上面讲的利用汉密尔顿函数的不太一样,这里不去细说了。
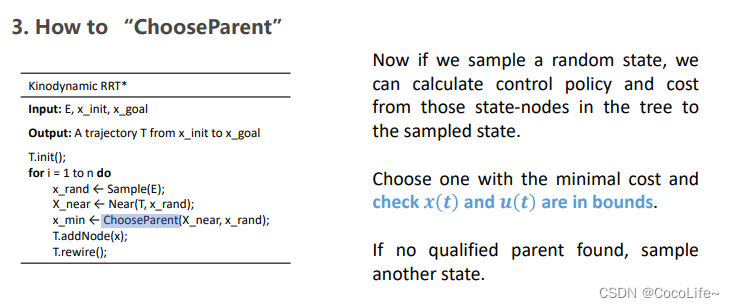
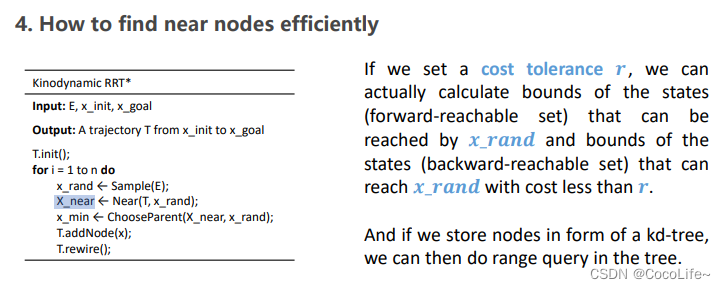
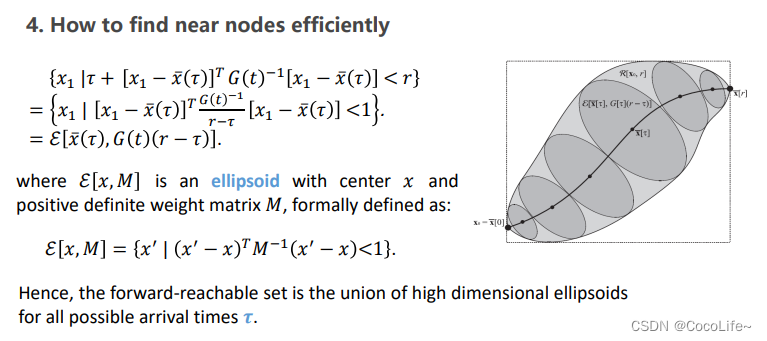
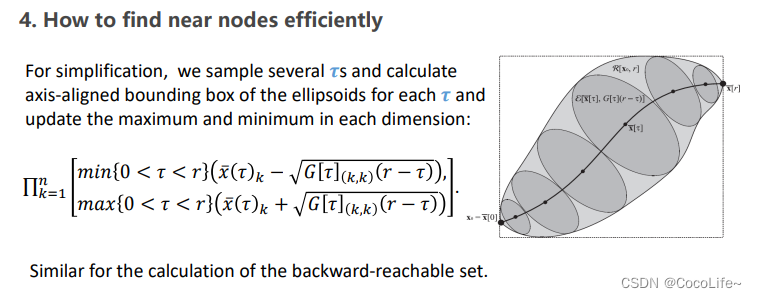
RRT*用球形的范围找周围采样点,那个时候的cost就是距离,那这里图里面的点都是不同的状态点,cost是很复杂的一个高维的公式,那就需要在当前状态找到cost在给定范围内的节点(很多个高维的椭球),找利用cost在给定范围r找父节点的集合就是前向可达集,同理有后向可达集。
本文仅作个人笔记之用,如有纰漏,欢迎大家指正和讨论!希望可以和大家一起进步nie!















 456
456











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









