







前言
在上期我们介绍了策略梯度(PG算法),这期我们将继续深入PG算法,从TRPO、PPO,到最后最近大火的deepseek中的强化学习算法GRPO。
前期回顾
强化学习:基础知识篇(包含Gym库的简单实践)——手把手教你入门强化学习(一)
强化学习:Markov决策过程(MDP)——手把手教你入门强化学习(二)
强化学习:实践理解Markov决策过程(MDP)——手把手教你入门强化学习(三)
强化学习:动态规划求解最优状态价值函数——手把手教你入门强化学习(四)
强化学习:蒙特卡罗求解最优状态价值函数——手把手教你入门强化学习(五)
强化学习:时间差分(TD)(SARSA算法和Q-Learning算法)——手把手教你入门强化学习(六)
强化学习:一文通透DQN算法及其变种(你要的深度强化学习算法)——手把手教你入门强化学习(七)
强化学习:策略梯度算法(PG算法族)——手把手教你入门强化学习(八)
一、理论基础
KL散度
在学习之前,首先我们需要先了解一下KL散度,KL 散度是信息论中的概念,它是用来两个概率分布差异的指标。我们先看一下公式:

- 若P和Q一致,则KL散度为0
- 若P和Q差异越大,则KL散度越高。
一般在强化学习中,我们比它用于新旧策略 π o l d \pi_{old} πold和 π n e w \pi_{new} πnew的差异度量,防止策略突变。
KL惩罚
KL惩罚则是将KL散度作为正则项加入到目标函数中,控制策略更新的幅度。在强化学习中,我们会将KL散度作为正则项加入优化目标,限制策略更新幅度。类似这样,加在目标函数中。

β
\beta
β:权衡策略性能与保守性的系数。
很好理解,当差异越大时,目标函数就会变小,防止因策略变换太大,目标函数急剧增大。
自然梯度
这里我就不详细展开了,简单说一下,自然梯度通过引入概率分布的几何结构,修正普通梯度的方向,使其更符合策略分布的“真实”变化,核心思想是用KL散度衡量策略分布的差异,并基于此重新定义梯度方向。主要解决了传统梯度更新方向不匹配,步长难以控制两个问题,因为在传统梯度下降中,参数的更新方向由损失函数的梯度决定,参数空间是欧氏空间(即参数变化对策略的影响是均匀的)。然而,在强化学习中,策略是一个概率分布
π
θ
(
a
∣
s
)
\pi_{\theta}(a|s)
πθ(a∣s),参数空间与策略分布空间的几何结构并不一致。
简单来说,我们用自然梯度在更新策略函数的时候,能更符合策略分布的“真实”变化。
公式如下:
∇
θ
L
(
θ
)
\nabla_{\theta}L(\theta)
∇θL(θ)是普通梯度
F 是Fisher信息矩阵,反映策略分布的局部曲率。

Fisher矩阵度量了策略分布
π
θ
\pi_{\theta}
πθ对参数
θ
\theta
θ 变化的敏感度。
- 若某参数方向导致策略分布剧烈变化,Fisher矩阵在该方向上的值较大。
- 若某参数方向对策略分布影响微弱,Fisher矩阵在该方向上的值较小。
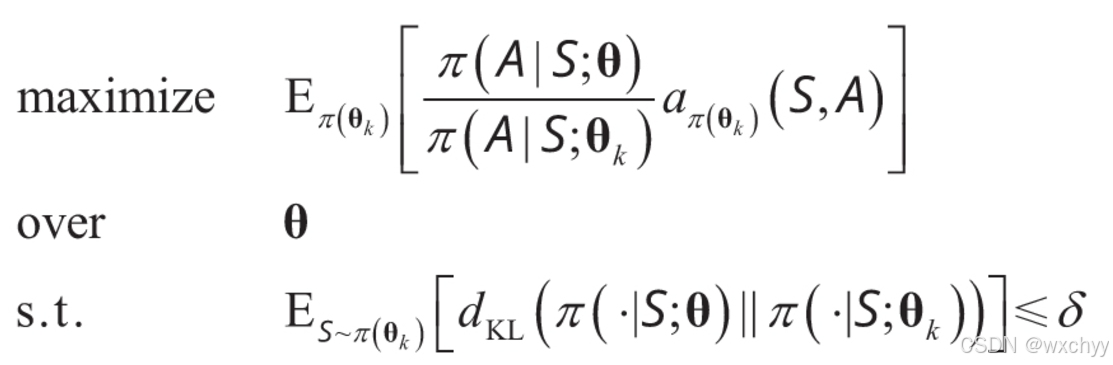
二、TRPO算法
在了解了KL散度,KL惩罚,自然梯度之后,我们来学习TRPO算法,TRPO是英文单词Trust Region Policy Optimization的简称,翻译成中文是“置信域策略优化”。它的主要思想就是,如果策略更新,那它必须在以旧策略为中心的“信任域”内(KL散度 ≤ δ),就是新策略更新要有个范围。我们可以看一下它的数学形式。我们希望最大化优势函数,并且新策略的性能不比旧策略差。
不过在推导数学公式之前,我们需要先了解一下重要性采样系数:
通过重要性采样系数,将旧策略的数据分布 “校正” 为新策略的分布。例如,旧策略选动作 A 的概率是 0.2,新策略选 A 的概率是 0.4,重要性采样系数 2 表示新策略对该动作的 “重视程度” 是旧策略的 2 倍,通过放大旧数据中该动作的优势,近似新策略的期望。
若新策略多执行优势为正的动作,少执行优势为负的动作,整体回报就会提升。因此,最大化优势函数的期望,本质是引导策略向 “高价值动作” 倾斜。
我们再看一下在旧策略下优势函数:
在旧策略
a
π
(
θ
k
)
(
S
,
A
)
a_{\pi(\theta_{k})}(S,A)
aπ(θk)(S,A)收集的状态 - 动作对中,某个动作 A 在状态 S 下,相较于 “平均表现” 的额外收益。
但是,自然梯度算法并没有直接求解这个问题,而是求解了一个近似的问题。因为如果用自然梯度算法求解的话,在高维或非线性策略空间中,KL散度的局部形状可能非二次,导致自然梯度方向不准确,同时近似可能也不是最优,甚至变差。为了解决这一个问题,我们先需要采用共轭梯度法求解自然梯度,我们看最终迭代式扩展为:
信任域策略优化算法则用以下方法确定j的值:j从非负整数到0,1,2,…中依次寻找首个满足期望KL散度约束并且能提升代理梯度的值。
对此,我们看一下TRPO如何进行求解的。
(1) 初始化参数:θ←任意值(策略参数),w←任意值(价值函数参数);
(2) 时序差分更新:对每个回合执行以下操作:
1)用策略π(θ)生成轨迹;使用当前策略π(θ)与环境交互,生成轨迹数据。
2)用生成的轨迹和由w确定的价值函数估计θ处的策略梯度g和优势函数A。
优势函数:A(s,a) = Q(s,a) -
V
ω
(
s
)
V_{\omega}(s)
Vω(s),Q值通过TD算法求得,V值由价值网络预测产生。
策略梯度:通过轨迹数据计算,表示策略性能提升的方向。
3 共轭梯度法求解自然梯度和最终更新量
用共轭梯度算法迭代得到x自然梯度方向,再结合信任域约束求得缩放因子得到最终更新量
2
δ
x
T
F
X
x
\sqrt{\frac{2\delta}{x^{T}FX}}x
xTFX2δx;
4 策略更新
确定j的值,使得新策略在信任域内,并且代理优势有提升。
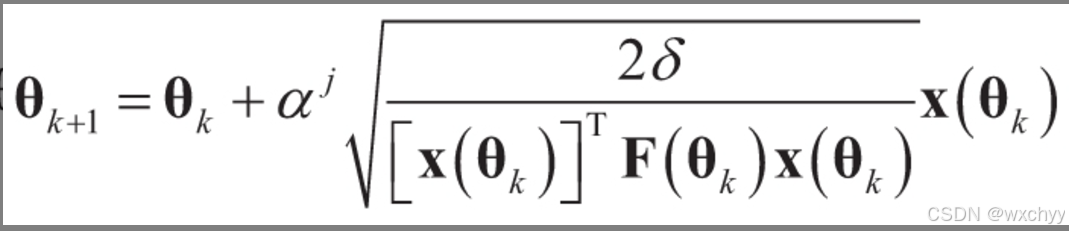
更新策略参数
θ
←
θ
+
α
j
2
δ
x
T
F
x
x
\theta \leftarrow \theta +\alpha_{j} \sqrt{\frac{2\delta}{x^{T}Fx}}x
θ←θ+αjxTFx2δx
5 价值函数更新
更新w以减小价值函数的误差,最小化时序差分误差(TD Error)。
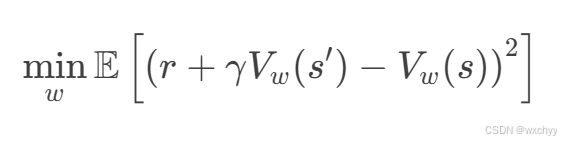
通过梯度下降更新w,提升优势函数估计的准确性。
三、PPO算法
由于TRPO 通过求解带 KL 散度约束的优化问题(需计算 Hessian 矩阵和共轭梯度),计算复杂度高(O (n³)),工程实现困难。在PPO(近端策略优化)算法中,引入了剪切比率以及自适应 KL 控制。
我们看一下它的具体改进:
1 它通过剪裁概率比来近似实现TRPO算法中的KL散度的约束,从而避免复杂的二阶优化。

其中
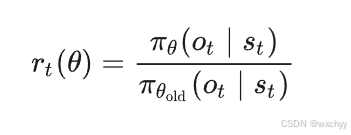
表示新旧策略在该动作上的概率比。如果该比值偏离 1 太远,它将被裁剪在
(
[
1
−
ε
,
1
+
ε
]
([1-\varepsilon,1+\varepsilon]
([1−ε,1+ε]范围内,这限制了策略在一次更新中可以变化的程度。
优势:无需显式计算 KL 散度和 Hessian,仅用一阶梯度下降(如 Adam),计算复杂度降至 O (n),代码量减少 90% 以上。
2 PPO采用自适应 KL 控制,PPO-KL惩罚
TRPO 的问题:手动设定 KL 散度阈值
δ
\delta
δ需反复调参,过小导致收敛慢,过大易退化。
在 PPO 中,这通过添加对参考模型(初始策略)的 KL 惩罚来体现。具体来说,我们在损失函数中加入类似以下内容:
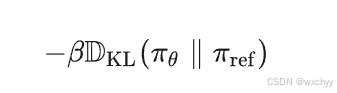
目标函数变为:

通过监测 KL 值自动调整
β
\beta
β(如 KL 超过目标值则增大
β
\beta
β,反之减小),避免手动调参。
四、GRPO算法
GRPO算法——组相对策略优化,用“多次模拟平均值”替代价值函数,为什么要消除价值函数呢,因为PPO 依赖价值网络(Critic)估计状态价值,需同时训练策略和价值两个模型,显存占用高(如 32B 模型需额外 20GB 显存),且价值函数误差易导致策略退化。
 那我们用什么替代价值函数呢,用“多次模拟平均值”替代价值函数。直接删除 Critic,对每个输入生成K 个候选输出,用组内平均奖励作为基线计算相对优势。简单来讲,现在我们用策略函数随机生成多个输出,在再组内求个平均,作为基准。举个例子:我们做数学题前,先生成 8 个解题步骤,奖励最高的候选优势为正,最低的为负,通过组内比较消除绝对奖励偏差。我们看一下公式。

同时,GRPO保留了 PPO 的裁剪和 KL 机制,以确保稳定、合规的更新。我们看一下目标函数公式:

通过计算同一问题的多个输出的平均值并进行标准化,得出“相对分数”。这样,我们不再需要专用的价值函数,但仍能获得动态的“分数线”,简化训练并节省资源。
GRPO 通过砍掉价值函数、用分组替代单样本、极简奖励,在大模型时代找到了 “少即是多” 的路径:牺牲部分生成效率,换取显存、训练成本和推理质量的突破。
总结
这期我们从TRPO入手,讲了KL散度约束以及在约束下,最大期望优势函数,之后PPO在TRPO的基础上,采用了剪裁概率,进行了计算复杂度的改进,以及引入可自适应的KL惩罚,在这基础之上,GRPO通过组相对策略优化,直接消除了价值函数。
希望本文能帮助你自然地理解 TRPO,PPO 以及 GRPO。
写在文末
如果想要更深入学习强化学习的内容,关注我,下期更精彩
请大家一定一定要关注!!!
请大家一定一定要关注!!!
请大家一定一定要关注!!!
友友们,你们的支持是我持续更新的动力~



















 719
719

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











