






文章目录
学习stm32中断、DMA通信原理和编程方法。使用stm32tubemx和HAL库分别完成以下编程练习:
一. 用stm32F103核心板的GPIOA端一管脚接一个LED,GPIOB端口一引脚接一个开关(用杜邦线模拟代替)。采用中断模式编程,当开关接高电平时,LED亮灯;接低电平时,LED灭灯。
HAL库实现
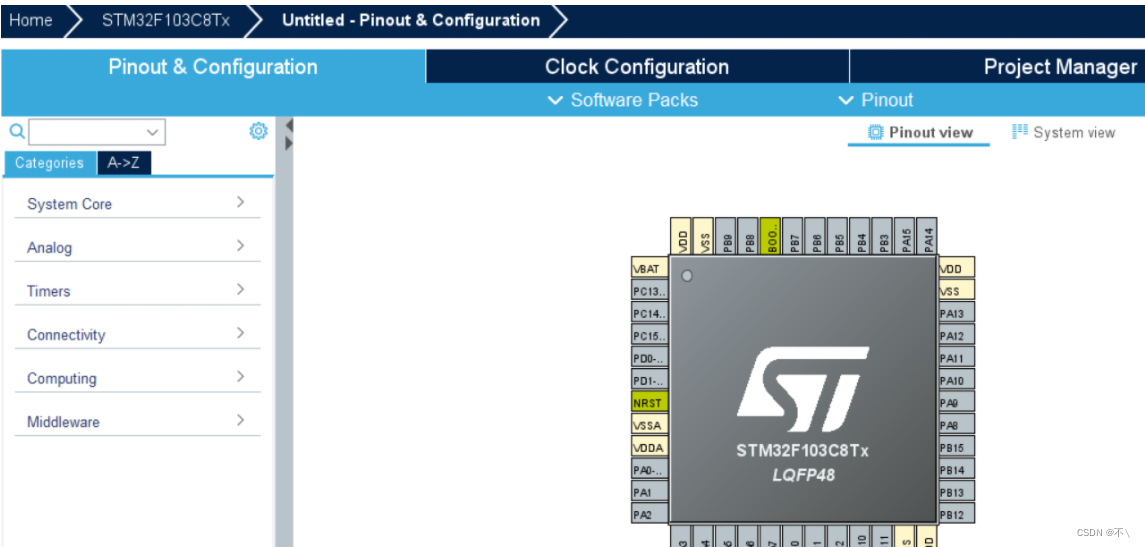
1.打开stm32tubeMX创建工程,选择stm32F103c8
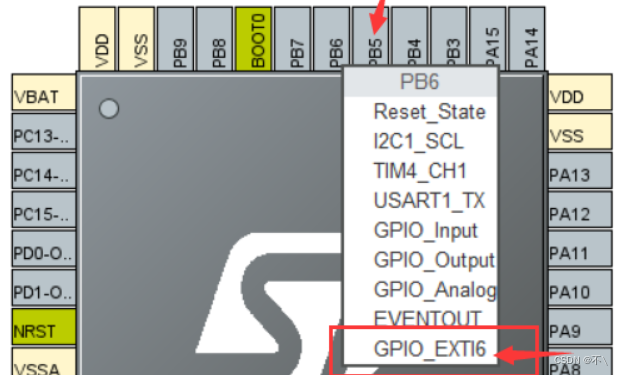
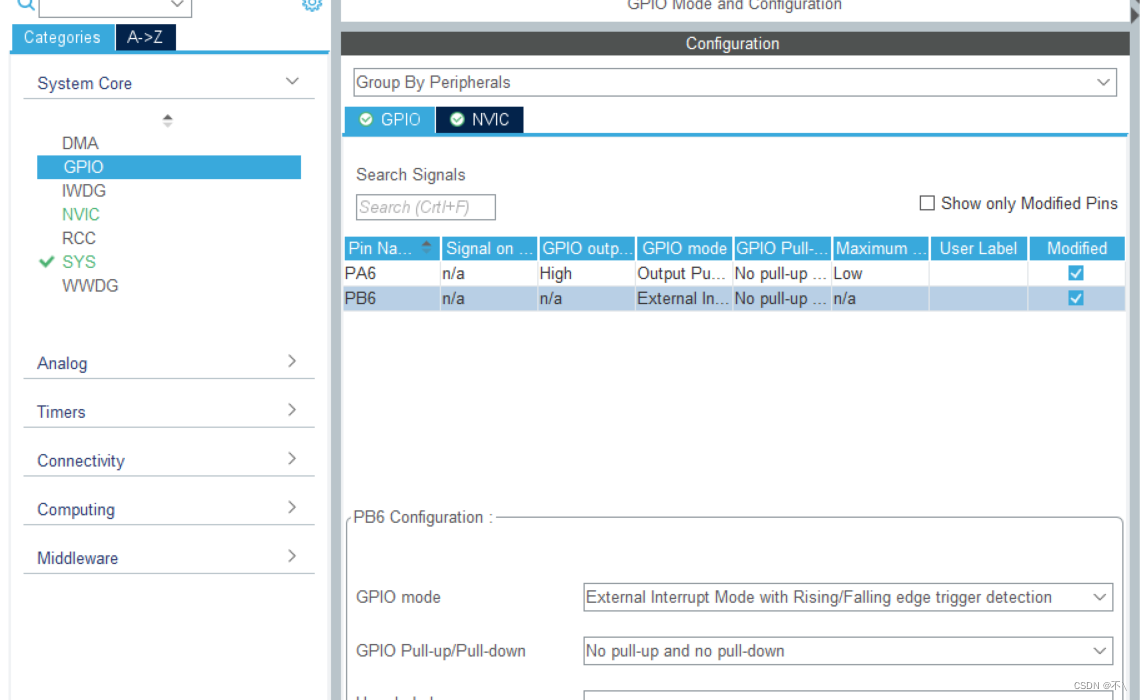
2.设置PB6为中断模式
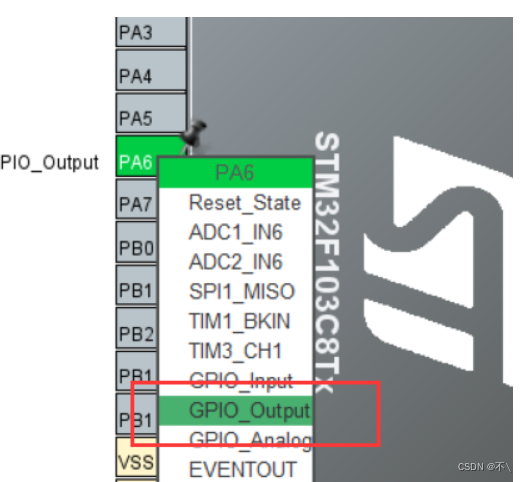
3.设置PA6为输出
4.设置引脚
设置引脚PA6,点击 GPIO---->PA6—>GPIO output level,GPIO output level设置为high。如图。
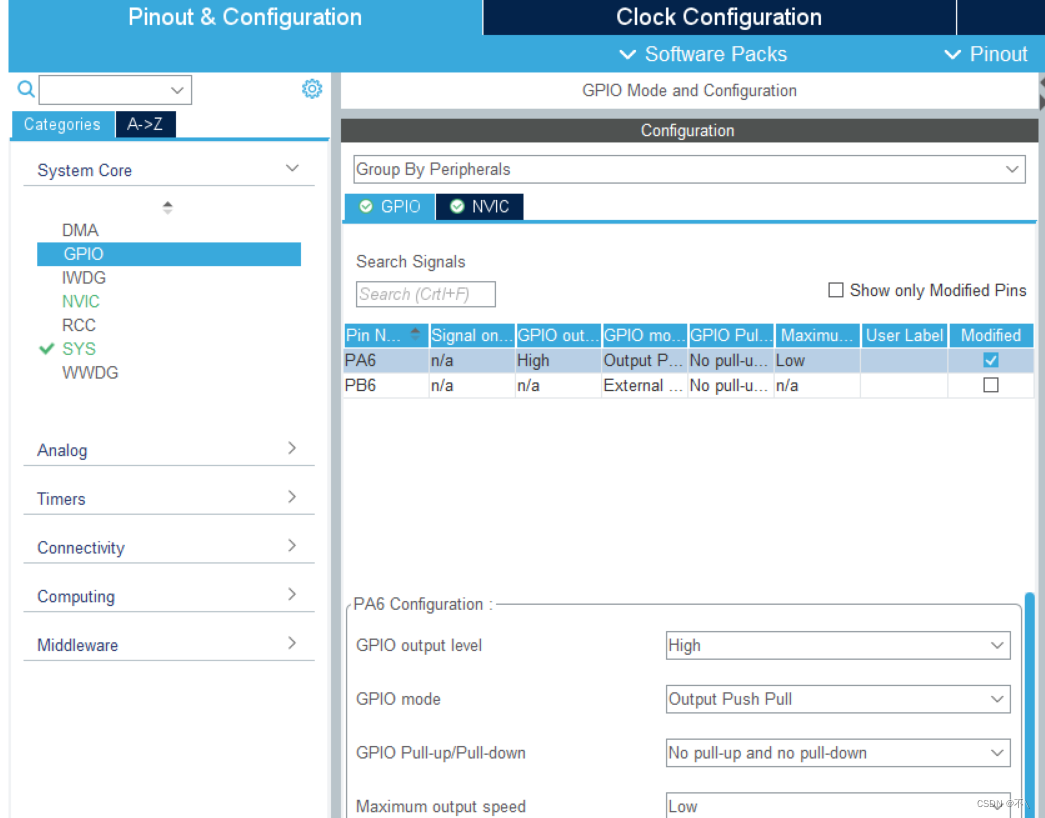
设置引脚PB6,点击 GPIO---->PB6—>GPIO mode,如图。
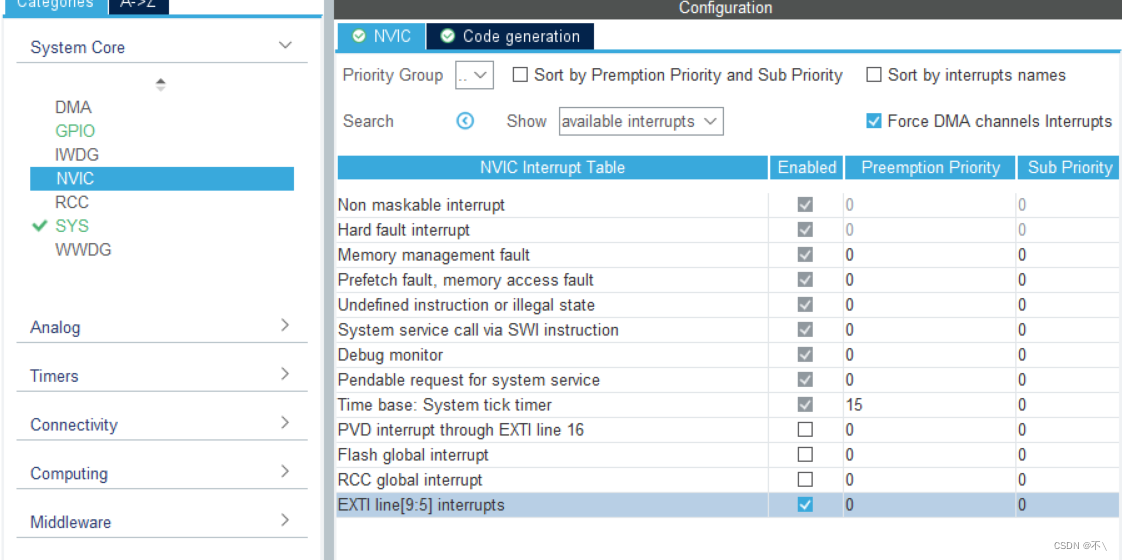
5.开启中断。
点击NVIC—>EXIT line[9:5] interrupts.
如图:
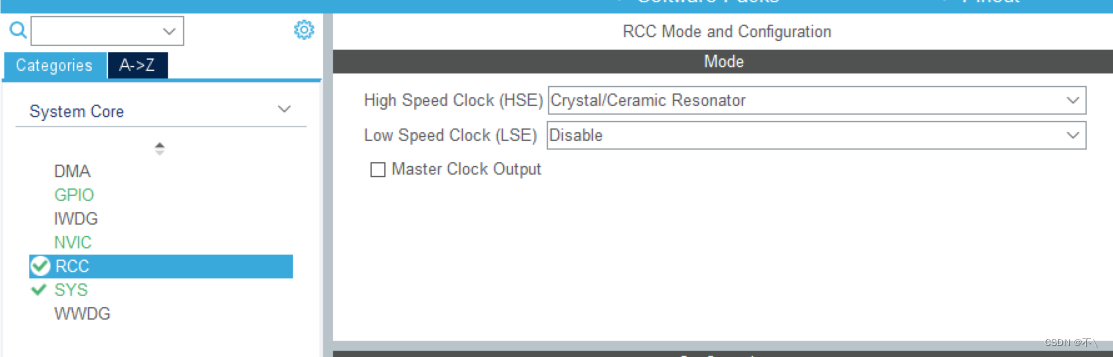
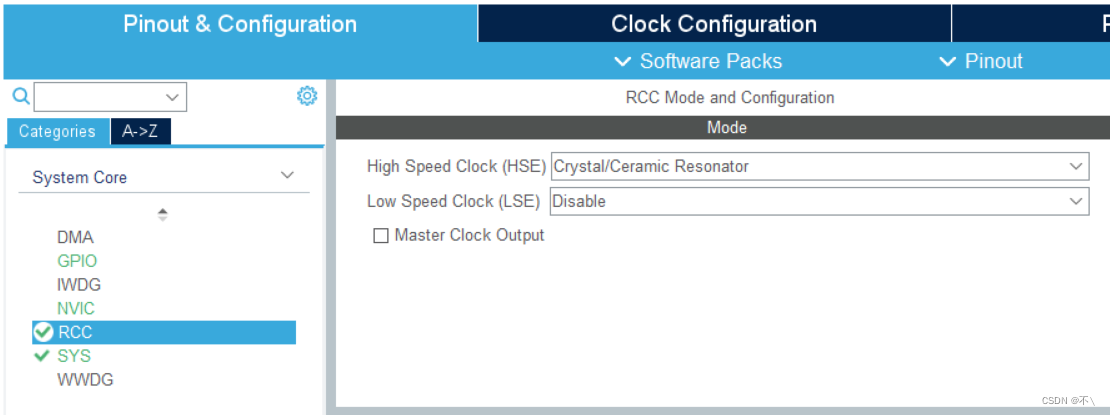
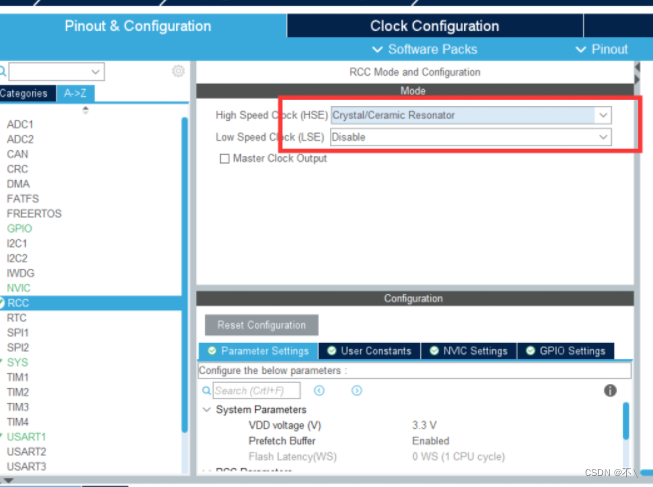
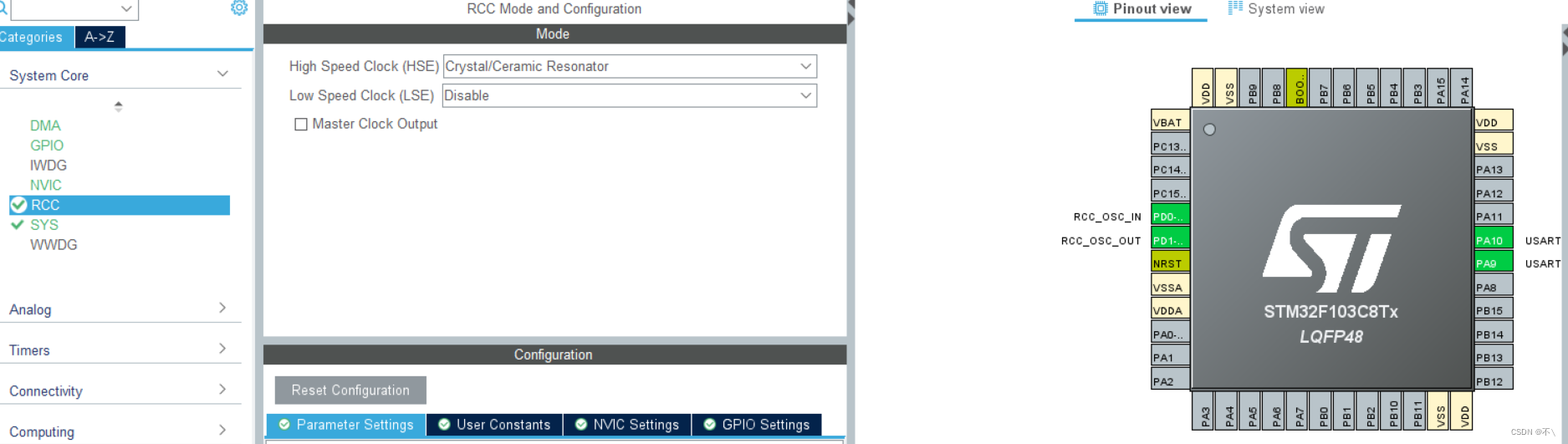
6.设置RCC:设置时钟源为外部时钟源。
点击RCC---->High speed clock.
7.设置SYS。
点击SYS—>Debug.
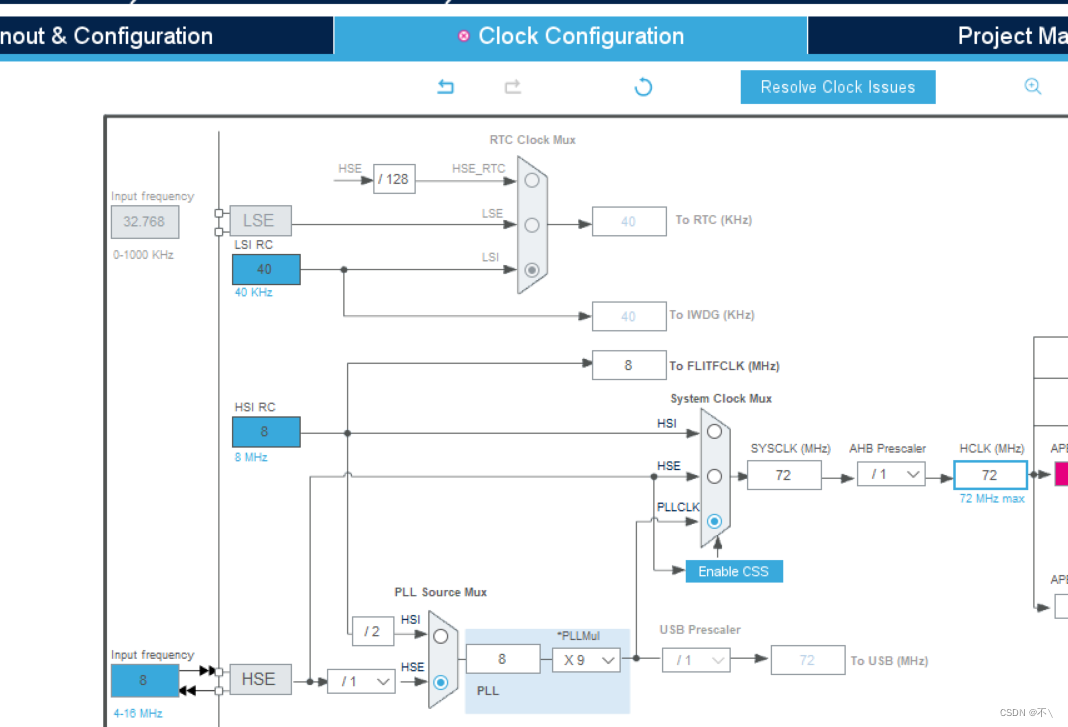
8.设置时钟树
点击Clock Configuration。
设置结果:
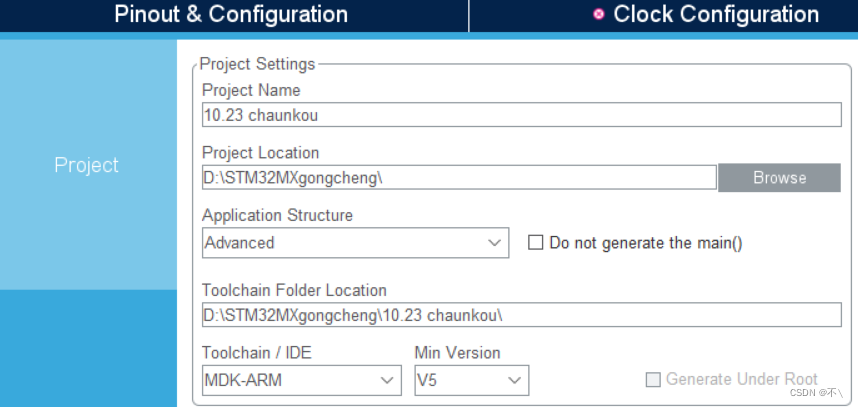
9.配置项目
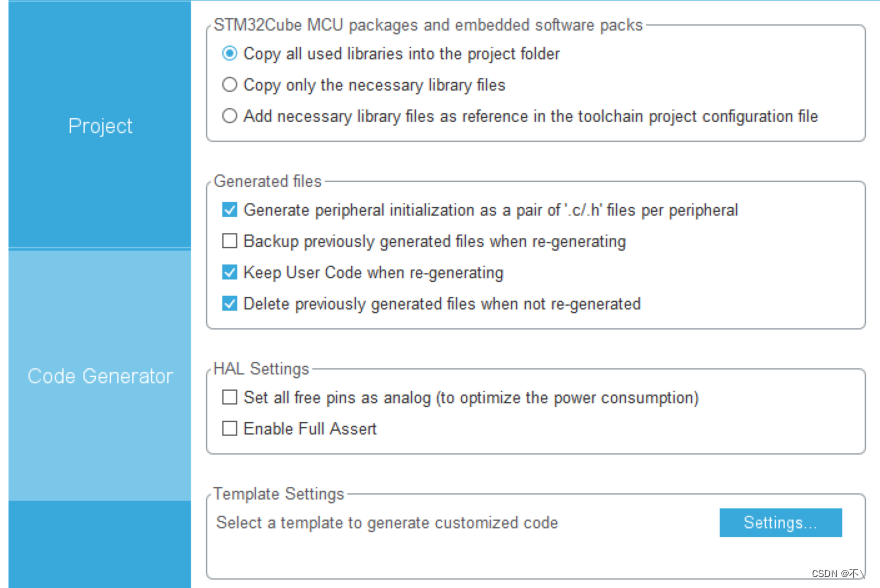
点击Project Manager
设置项目名称及Toolchain/IDE及Min Version。设置结果如图
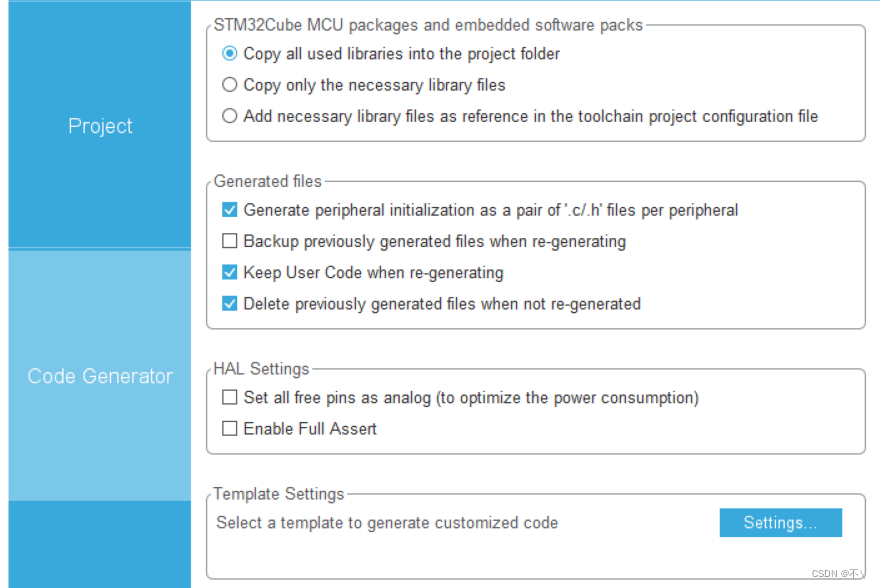
点击Code Generator。设置结果如图
生成。
代码
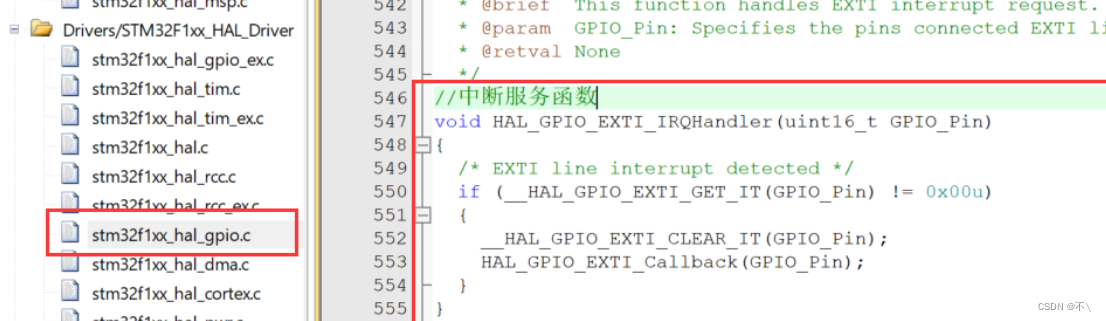
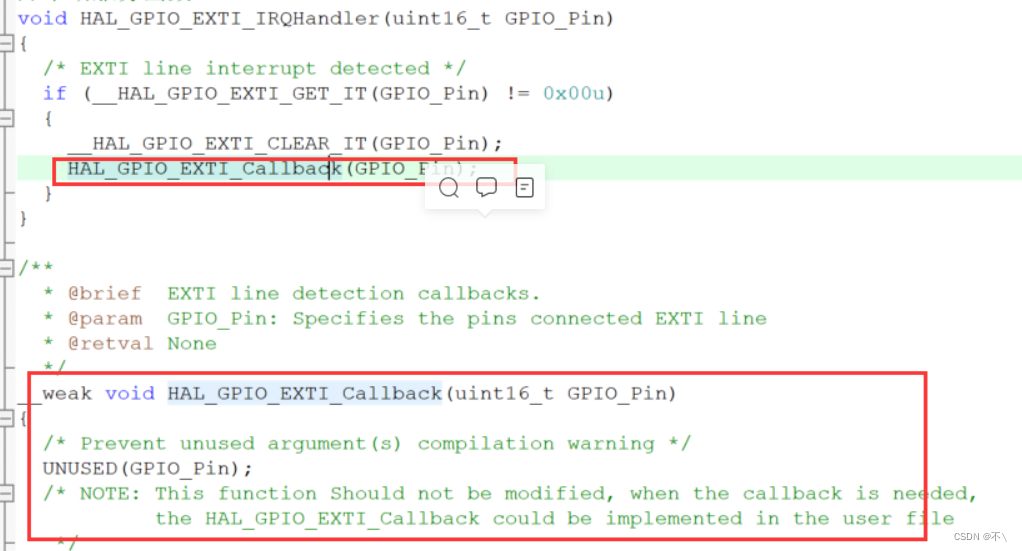
中断服务函数。根据前面的设置,上升沿就会触发这个函数,在这个函数中调用了另外一个名为HAL_GPIO_EXTI_Callback()函数,这个函数是回调函数,前面__weak表示此函数为虚函数,需重写。如下
在main.c中添加如下代码
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin){
GPIO_PinState b6_pin = HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_6); // 读取b6的状态
switch (GPIO_Pin){
case GPIO_PIN_6:
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_6, b6_pin); // 将a6写入与b6相同的电位
break;
}
}
编译
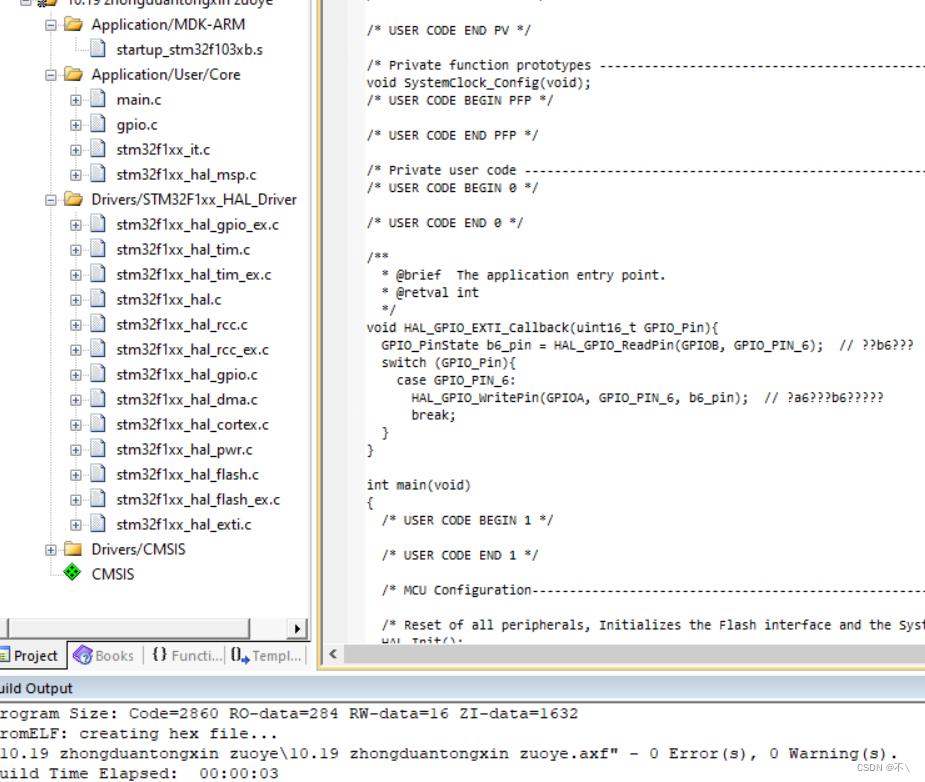
编译成功。
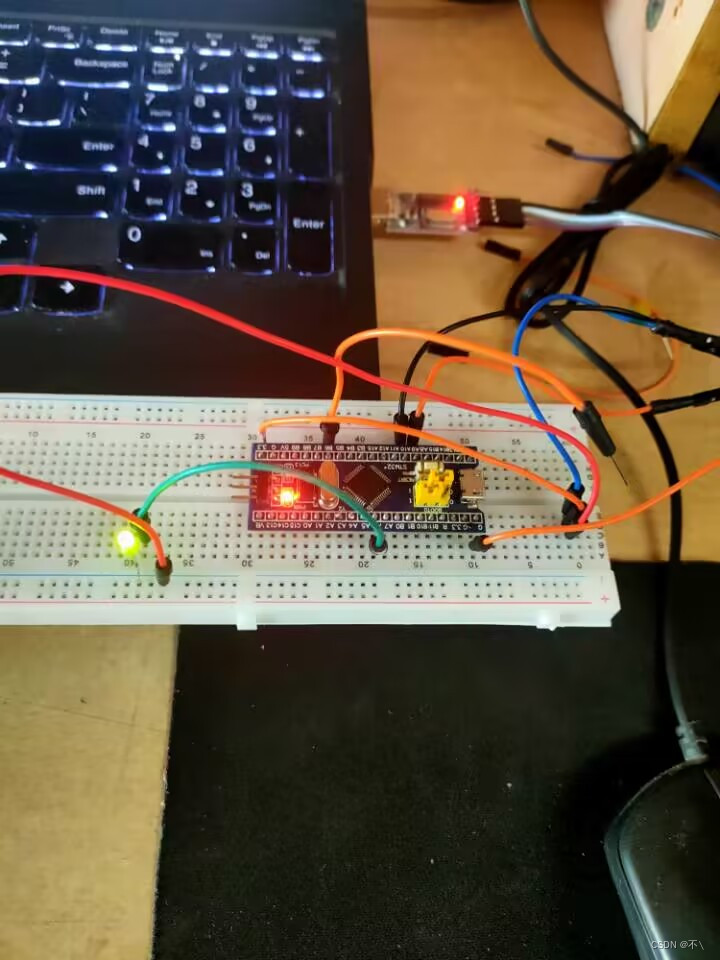
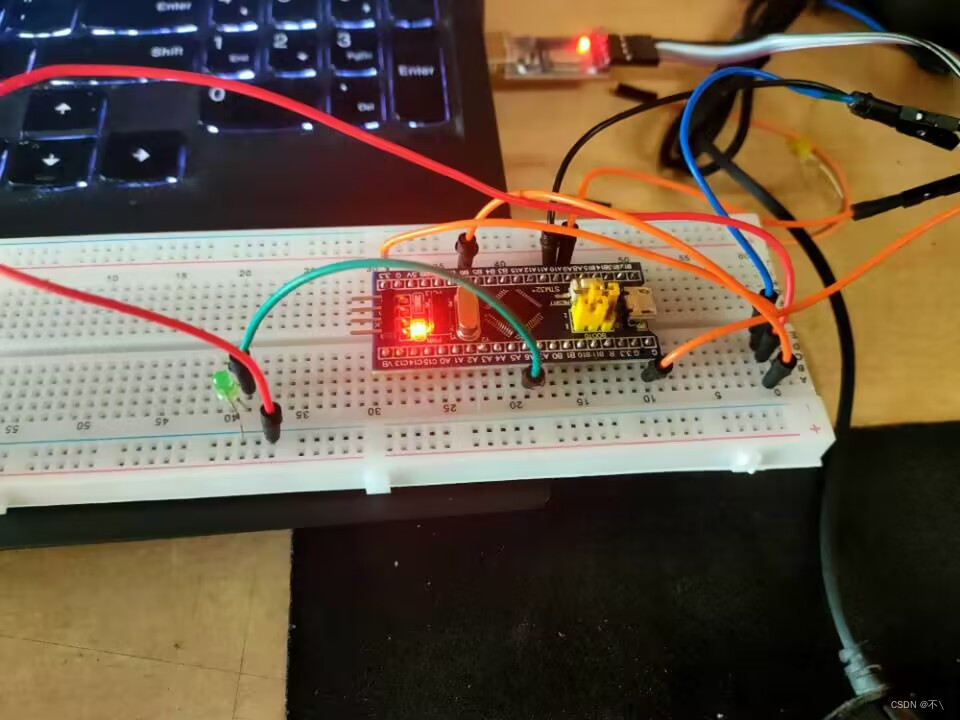
连线:
LED长脚——3V3
LED短脚——PA6
PB6——3V3——亮灯
PB6——GND——熄灯
烧录。
结果:
二. 采用串口中断方式重做上周的串口通信作业,分别实现:1)当stm32接收到字符“s”时,停止持续发送“hello windows!”; 当接收到字符“t”时,持续发送“hello windows!”;
1.打开stm32cubeMX,新建一个工程。
2.设置RCC
3.设置SYS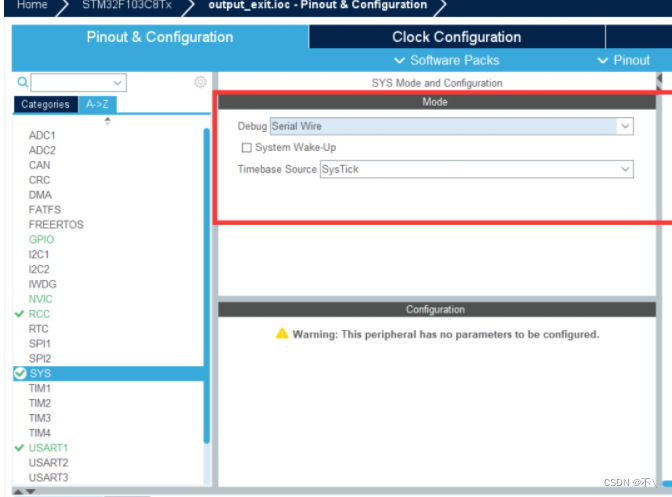
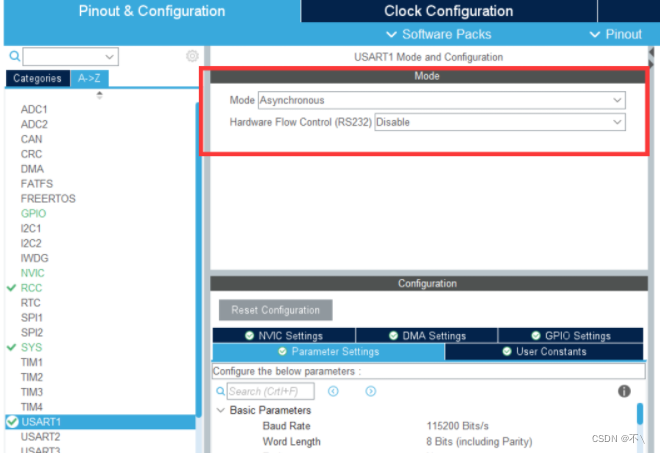
4.设置USART1
5.设置NVIC
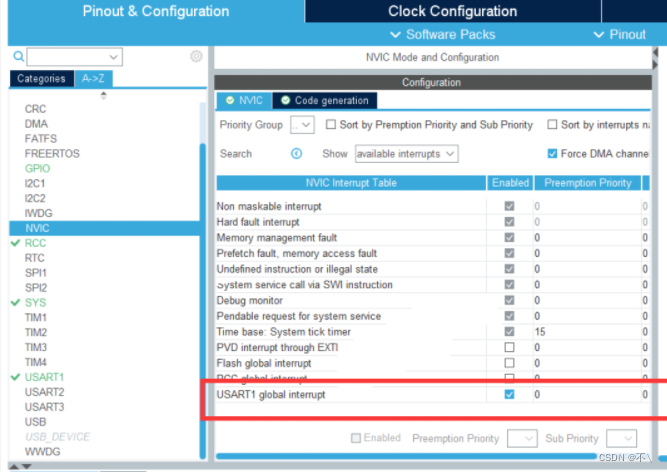
设置
创建成功。
4.main函数中的while循环里面添加传输代码
if(flag==1){
//发送信息
HAL_UART_Transmit(&huart1, (uint8_t *)&message, strlen(message),0xFFFF);
//延时
HAL_Delay(1000);
}
5.在main函数下面重写中断处理函数
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
//当输入的指令为0时,发送提示并改变flag
if(c=='0'){
flag=0;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips2, strlen(tips2),0xFFFF);
}
//当输入的指令为1时,发送提示并改变flag
else if(c=='1'){
flag=1;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips1, strlen(tips1),0xFFFF);
}
//当输入不存在指令时,发送提示并改变flag
else {
flag=0;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips, strlen(tips),0xFFFF);
}
//重新设置中断
HAL_UART_Receive_IT(&huart1, (uint8_t *)&c, 1);
}
完整的main.c代码
#include "main.h"
#include "usart.h"
#include "gpio.h"
#include <string.h>
void SystemClock_Config(void);
char c;//?? 0:?? 1:??
char message[]="hello Windows\n";//????
char tips[]="CommandError\n";//??1
char tips1[]="Start.....\n";//??2
char tips2[]="Stop......\n";//??3
int flag='s';//?? 0:???? 1.????
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART1_UART_Init();
HAL_UART_Receive_IT(&huart1, (uint8_t *)&c, 1);
while (1)
{
if(flag=='t'){
//????
HAL_UART_Transmit(&huart1, (uint8_t *)&message, strlen(message),0xFFFF);
HAL_Delay(1000);
}
}
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(c=='s'){
flag='s';
HAL_UART_Transmit(&huart1, (uint8_t *)&tips2, strlen(tips2),0xFFFF);
}
else if(c=='t'){
flag='t';
HAL_UART_Transmit(&huart1, (uint8_t *)&tips1, strlen(tips1),0xFFFF);
}
else {
flag='s';
HAL_UART_Transmit(&huart1, (uint8_t *)&tips, strlen(tips),0xFFFF);
}
HAL_UART_Receive_IT(&huart1, (uint8_t *)&c, 1);
}
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
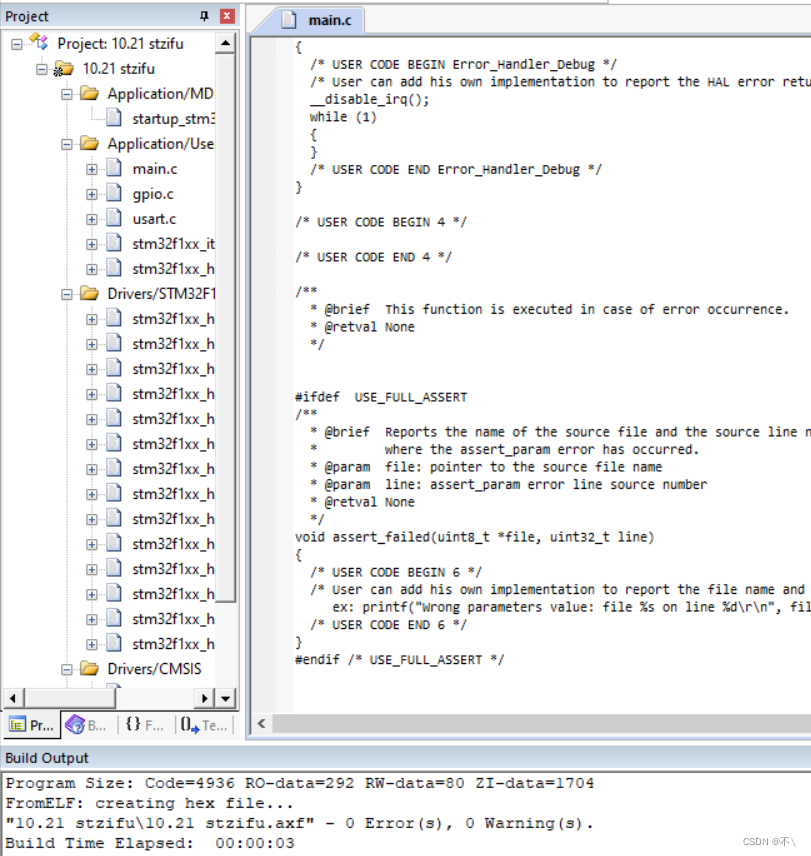
编译无误
烧录及运行结果:
发送s时停止发送“hello world”
发送t时开始发送“hello world”
2)当stm32接收到字符“stop stm32!”时,停止持续发送“hello windows!”; 当接收到字符“go stm32!”时,持续发送“hello windows!”
1.打开stm32cubeMX,新建一个工程。
2.设置RCC
3.设置SYS
4.设置USART1
5.设置NVIC
设置
创建成功。
要将接收到的连续字符保存到一个字符数组里,进行判别匹配。写一个接收字符串的函数。
完整的main.c文件
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "Serial.h"
#include "string.h"
int flag=1;
int main(void)
{
Serial_Init();
while (1)
{
if (Serial_RxFlag == 1)
{
if (strcmp(Serial_RxPacket, "stop stm32!") == 0)
{
flag=0;
printf("stop!");
}
else if (strcmp(Serial_RxPacket, "go stm32!") == 0)
{
flag=1;
printf("go");
}
printf("over");
Serial_RxFlag = 0;
}
if(flag==1)
{printf("hello window!");
Delay_ms(1000);
}
}
}
编译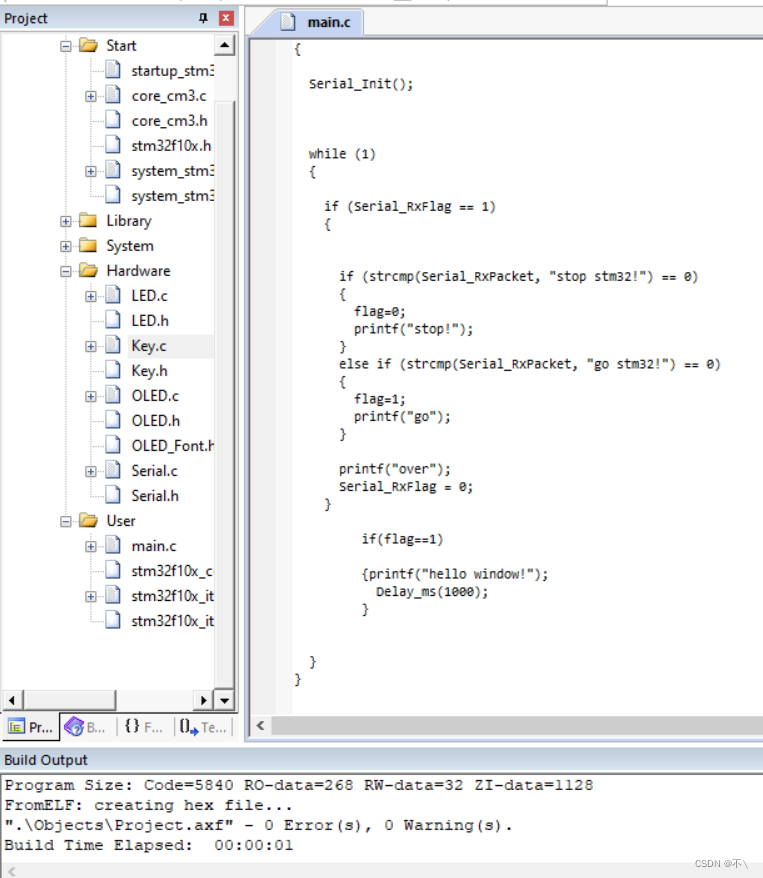
编译无误。
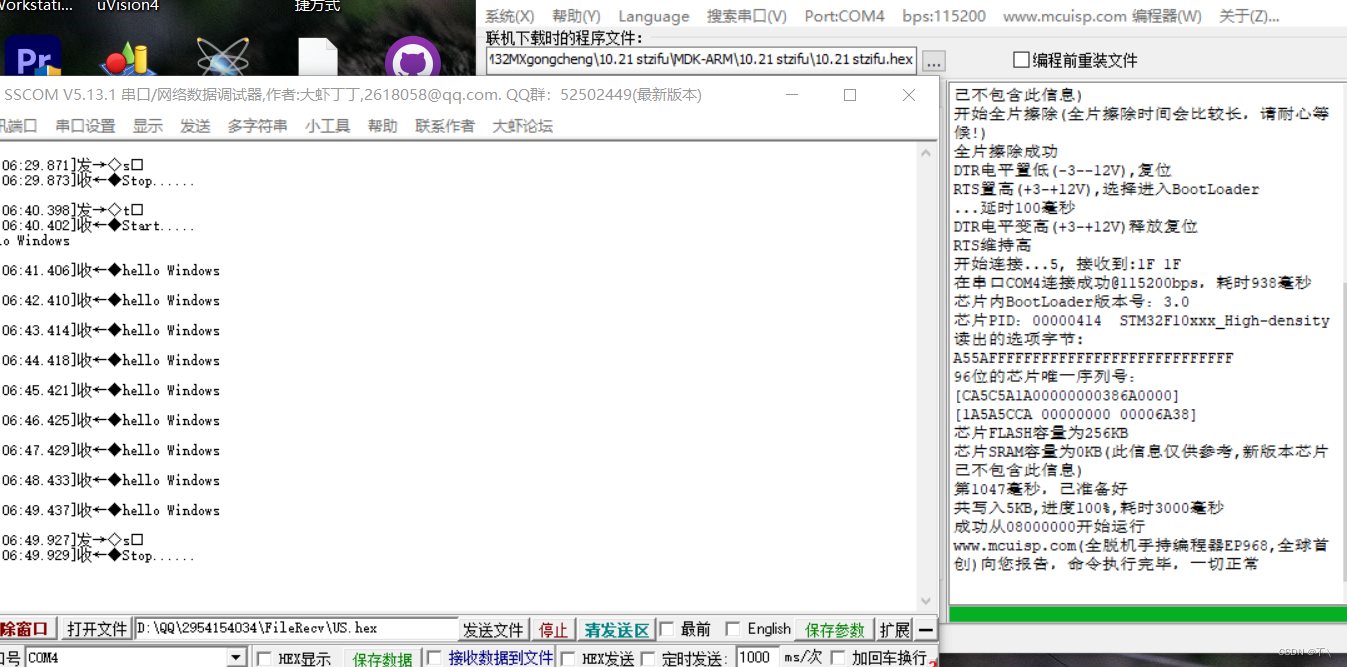
烧录,运行。
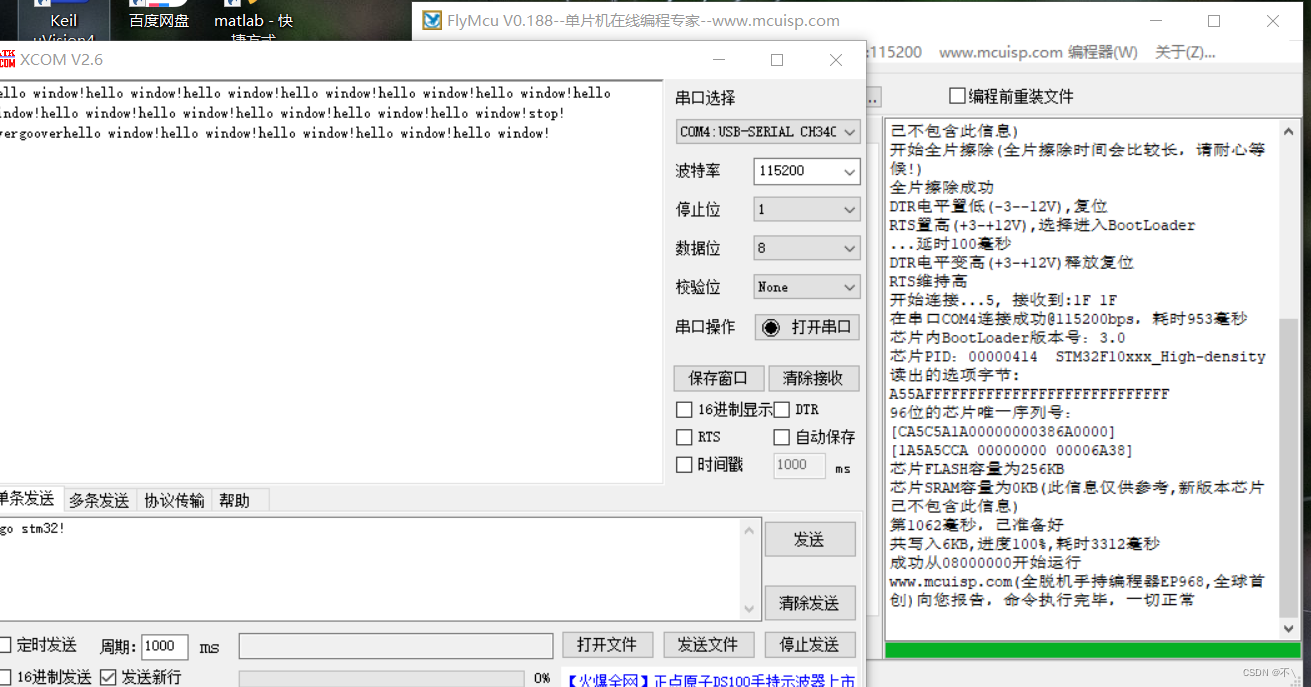
运行结果:发送“stop stm32!”,停止发送“hello world”
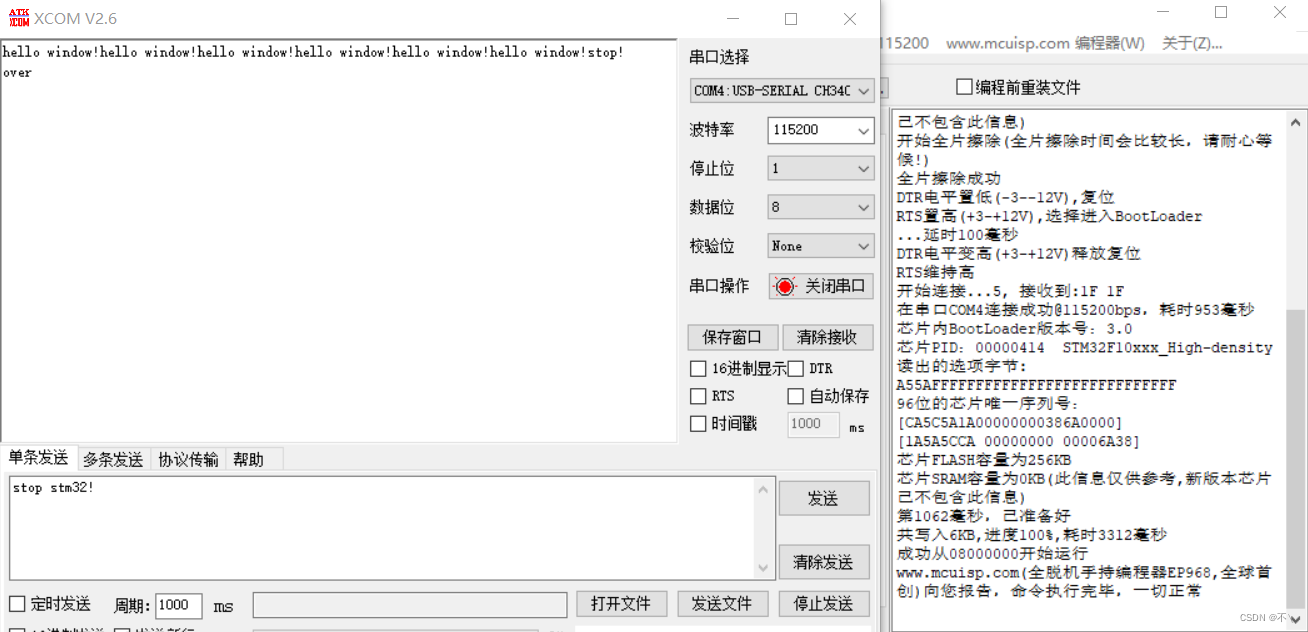
发送“go stm32!”继续发送“hello world”
三. STM32采用串口DMA方式,用115200bps或更高速率向上位机连续发送数据。
什么是DMA
DMA就是基于以上设想设计的,它的作用就是解决大量数据转移过度消耗CPU资源的问题。有了DMA使CPU更专注于更加实用的操作–计算、控制等。
直接存储器访问 (DMA)
DMA传输将数据从一个地址空间复制到另一个地址空间,提供在外设和存储器之间或者存储器和存储器之间的高速数据传输。
DMA传输过程的初始化和启动由CPU完成,传输过程由DMA控制器来执行,无需CPU参与,从而节省CPU资源,提高利用率。
2.DMA传输方式
DMA的作用就是实现数据的直接传输,而去掉了传统数据传输需要CPU寄存器参与的环节,主要涉及四种情况的数据传输,但本质上是一样的,都是从内存的某一区域传输到内存的另一区域(外设的数据寄存器本质上就是内存的一个存储单元)。四种情况的数据传输如下:
外设到内存
内存到外设
内存到内存
外设到外设
普通模式
传输结束后(即要传输数据的数量达到零),将不再产生DMA操作。若
开始新的DMA传输,需在关闭DMA通道情况下,重新启动DMA传输。
循环模式
可用于处理环形缓冲区和连续数据流(例如ADC扫描模式)。当激活循
环模式后,每轮传输结束时,要传输的数据数量将自动用设置的初始值
进行加载, 并继续响应DMA请求。
DMA传输参数
数据传输需要:
1 数据的源地址
2 数据传输位置的目标地址
3 传递数据多少的数据传输量
4 进行多少次传输的传输模式
当用户将参数设置好,主要涉及源地址、目标地址、传输数据量这三个,DMA控制器就会启动数据传输,当剩余传输数据量为0时 达到传输终点,结束DMA传输 ,当然,DMA 还有循环传输模式 当到达传输终点时会重新启动DMA传输。
也就是说只要剩余传输数据量不是0,而且DMA是启动状态,那么就会发生数据传输。
DMA数据传输的四个要素
① 传输源 :DMA数据传输的来源
② 传输目标:DMA数据传输的目的
③ 传输数量:DMA传输数据的数量
④ 触发信号:启动一次DMA数据传输的动作
DMA控制器特点
STM32F411微控制器具备两个DMA控制器:DMA1和DMA2,每个
控制器有8个数据流,每个数据流可以映射到8个通道(或请求);
每一个DMA控制器用于管理一个或多个外设的存储器访问请求,并通
过总线仲裁器来协调各个DMA请求的优先级;
数据流(stream)是用于连接传输源和传输目标的数据通路,每个数
据流可以配置为不同的传输源和传输目标,这些传输源和传输目标称为
通道(Channel);
具备16字节的FIFO。使能FIFO功能后,源数据先送入FIFO,达到FIFO
的触发阈值后,再传送到目标地址。
STM32采用串口DMA方式,用115200bps或更高速率向上位机连续发送数据。
1.创建一个新的工程。
2.设置RCC
点击RCC---->High Speed Clock…,
结果如图:
3.设置串口
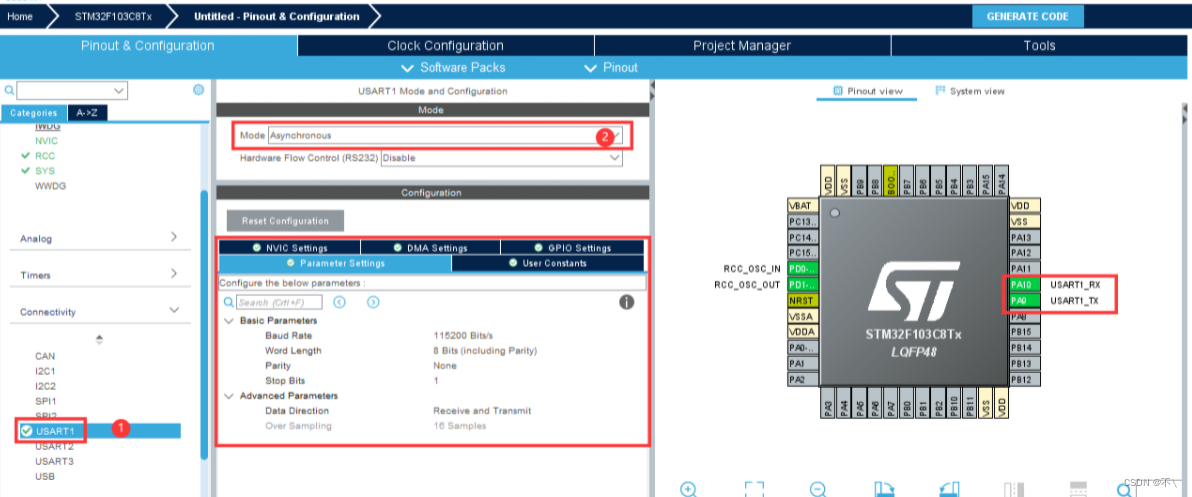
使能中断
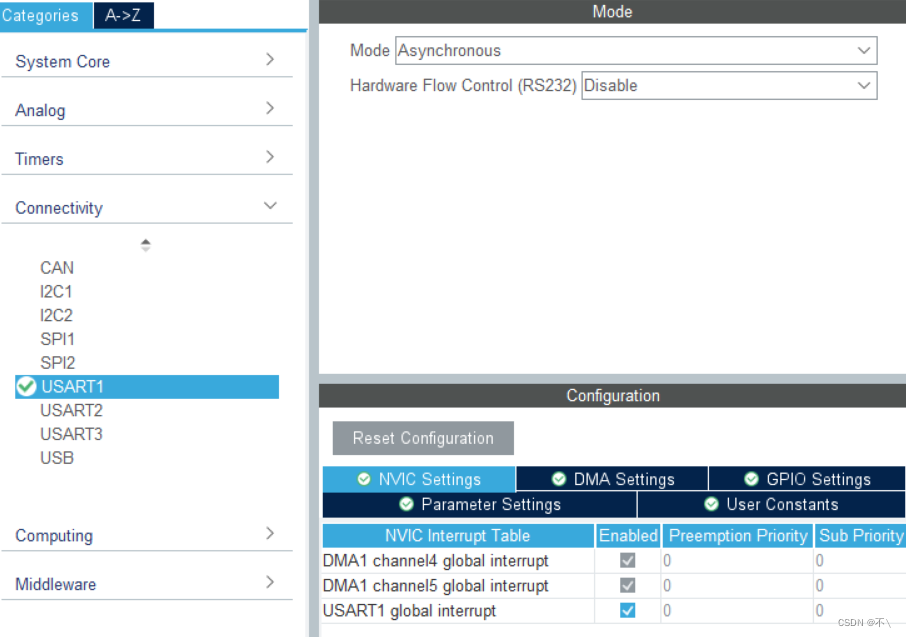
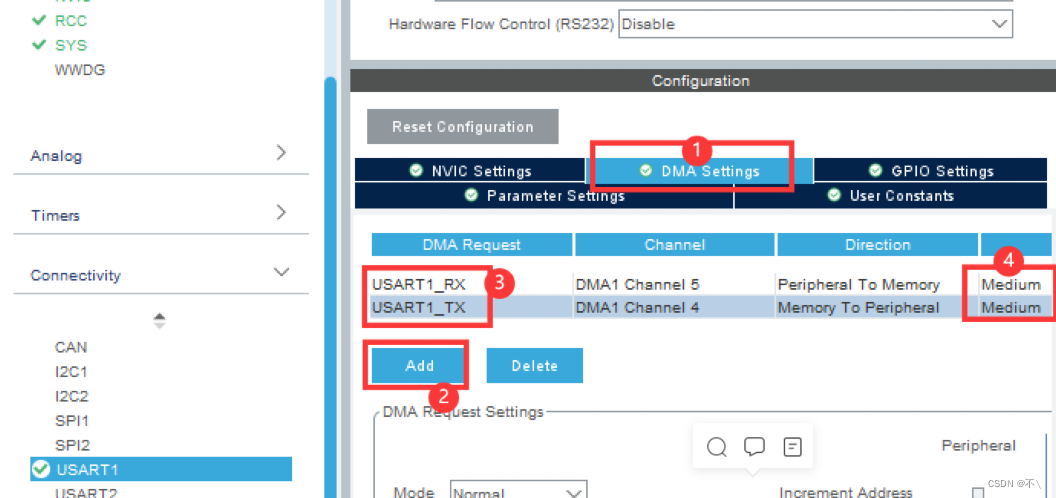
DMA设置
点击DMA Settings的Add添加通道,传输速率设置为中速Medium。
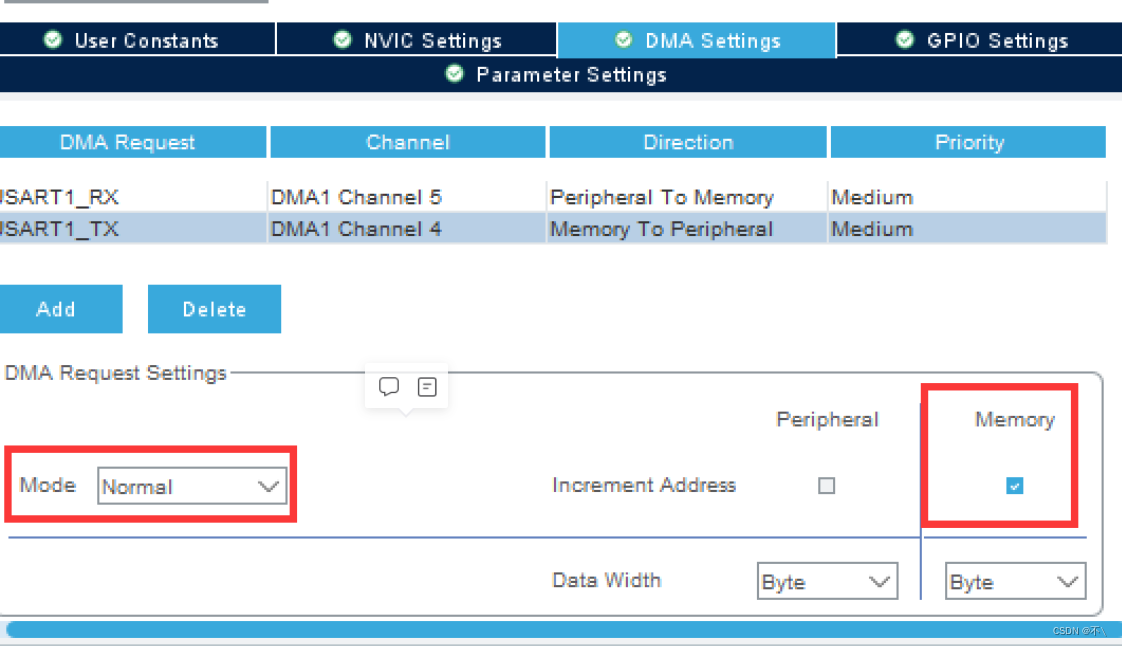
模式设置为Normal,右侧选择Memory
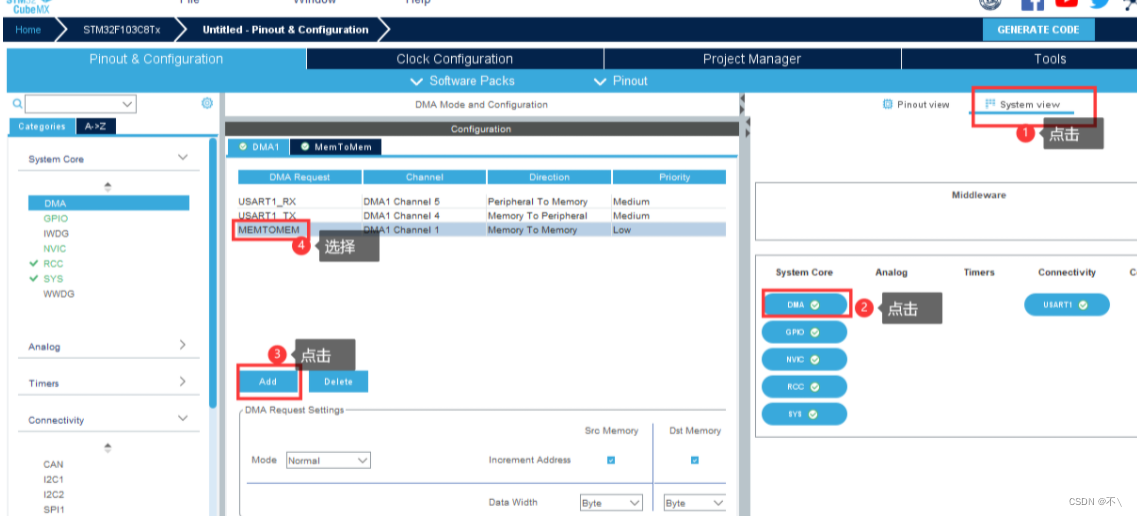
在System view下选择DMA
设置时钟
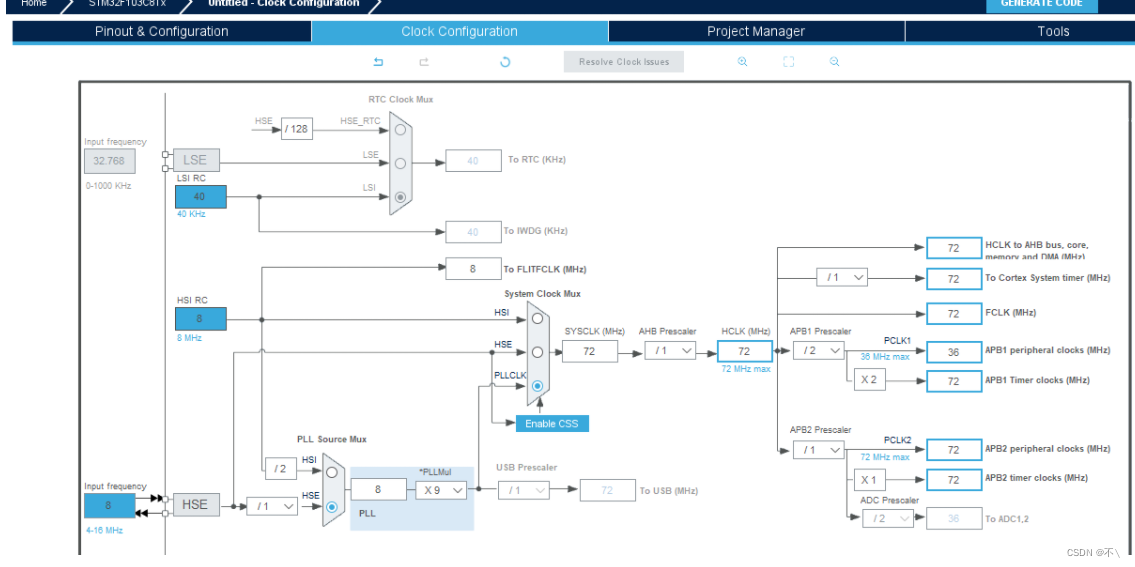
导出keil文件。
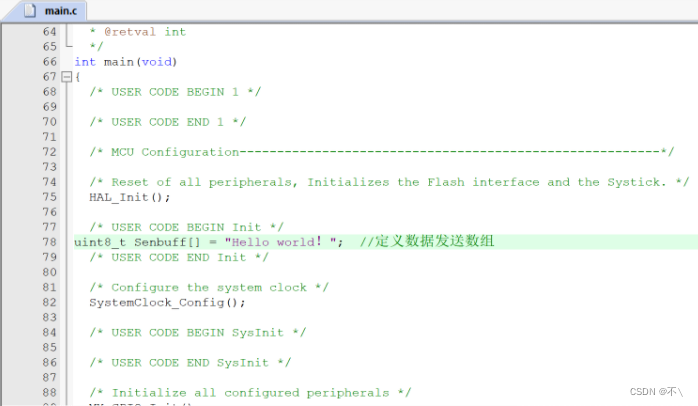
代码
在main.c文件添加代码
uint8_t Senbuff[] = "Hello world!"; //定义数据发送数组
HAL_UART_Transmit_DMA(&huart1, (uint8_t *)Senbuff, sizeof(Senbuff));
HAL_Delay(1000);
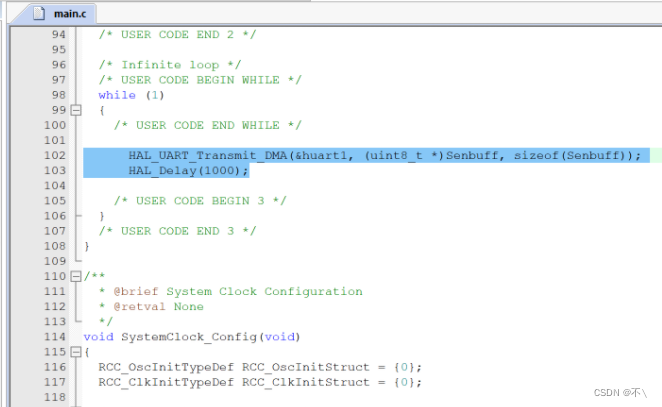
完整的main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
UART_HandleTypeDef huart1;
DMA_HandleTypeDef hdma_usart1_rx;
DMA_HandleTypeDef hdma_usart1_tx;
DMA_HandleTypeDef hdma_memtomem_dma1_channel1;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_DMA_Init(void);
static void MX_USART1_UART_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
uint8_t Senbuff[] = "Hello world!";
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
HAL_UART_Transmit_DMA(&huart1, (uint8_t *)Senbuff, sizeof(Senbuff));
HAL_Delay(1000);
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief USART1 Initialization Function
* @param None
* @retval None
*/
static void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 460800;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
/* USER CODE END USART1_Init 2 */
}
/**
* Enable DMA controller clock
* Configure DMA for memory to memory transfers
* hdma_memtomem_dma1_channel1
*/
static void MX_DMA_Init(void)
{
/* DMA controller clock enable */
__HAL_RCC_DMA1_CLK_ENABLE();
/* Configure DMA request hdma_memtomem_dma1_channel1 on DMA1_Channel1 */
hdma_memtomem_dma1_channel1.Instance = DMA1_Channel1;
hdma_memtomem_dma1_channel1.Init.Direction = DMA_MEMORY_TO_MEMORY;
hdma_memtomem_dma1_channel1.Init.PeriphInc = DMA_PINC_ENABLE;
hdma_memtomem_dma1_channel1.Init.MemInc = DMA_MINC_ENABLE;
hdma_memtomem_dma1_channel1.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE;
hdma_memtomem_dma1_channel1.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE;
hdma_memtomem_dma1_channel1.Init.Mode = DMA_NORMAL;
hdma_memtomem_dma1_channel1.Init.Priority = DMA_PRIORITY_LOW;
if (HAL_DMA_Init(&hdma_memtomem_dma1_channel1) != HAL_OK)
{
Error_Handler( );
}
/* DMA interrupt init */
/* DMA1_Channel4_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA1_Channel4_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA1_Channel4_IRQn);
/* DMA1_Channel5_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA1_Channel5_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA1_Channel5_IRQn);
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
编译无误后烧录即可。
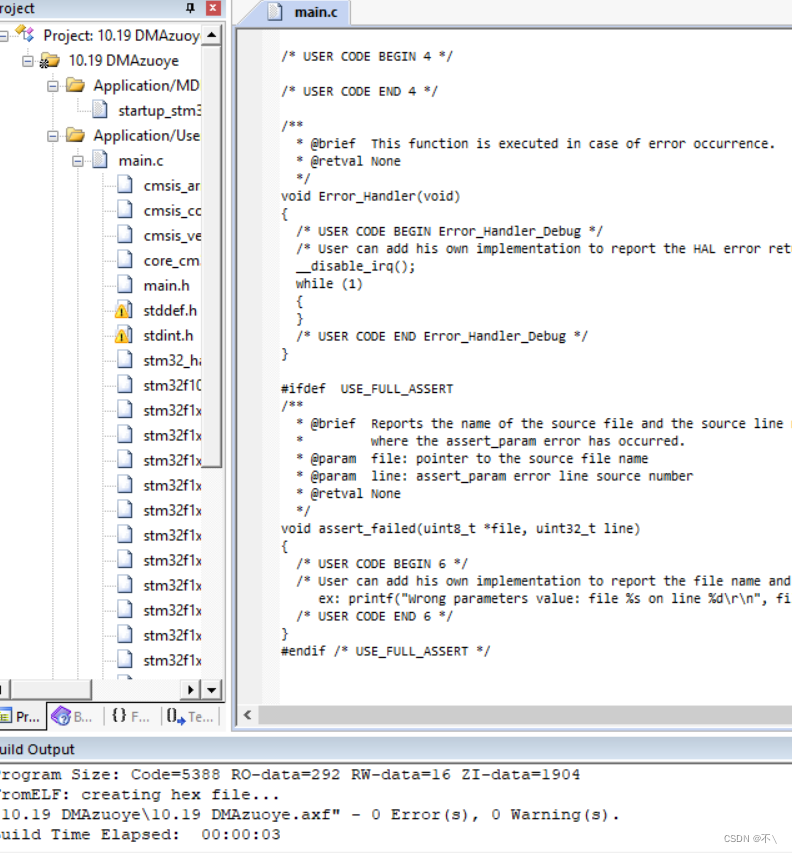
运行结果:

总结:学习需要耐心,即使一开始看着很不理解,但还是要耐心思考。写代码时头脑要清晰有条理。
参考链接:
https://blog.csdn.net/qq_46467126/article/details/121055475?spm=1001.2014.3001.5501
https://blog.csdn.net/qq_47281915/article/details/121024427
https://blog.csdn.net/qq_43279579/article/details/110138564















 961
961











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









