







在学习了利用lcd显示固定文件的照片之后。我们知道的是手上的这块K210开发板还集成了一枚摄像头模块,因此我们就可以利用摄像头模块捕捉照片并且实时的显示在板载lcd显示屏和IDE上,我们知道视频实际上由一帧一帧的照片组成,所以我们只需要让摄像头不断地拍照片,然后不断地刷新显示在板载的lcd上就可以了。下面我们先简单介绍一下MicroPython中关于摄像头的相关函数。
canmv机器视觉中的代码大部分都是照着OpenMV移植的,将所有的摄像头模块已经封装在sersor模块中,我们再使用时可以直接调用该模块内的相关内容,进而达到我们的目标。而不用过多的在意底层驱动。
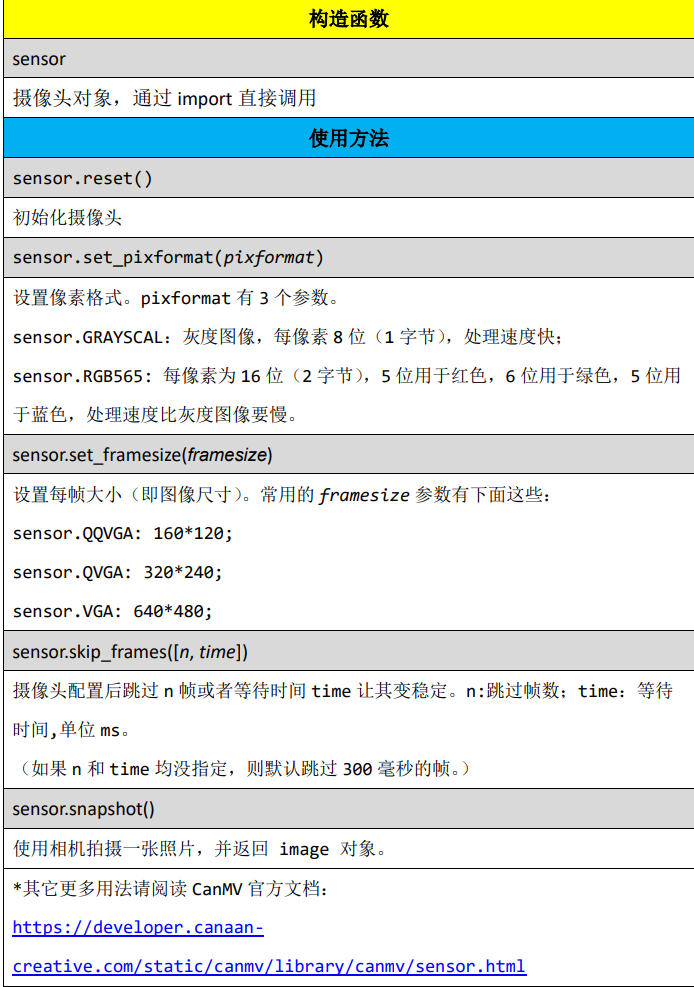
在这里有一点是要注意到的,就是sensor.skip_frames()这个函数,我们在实际的使用中摄像头的启动不是瞬间启动的,在启动的前一阵帧率是非常不稳定的,所以我们就可以利用这个函数让摄像头配置后等待一段时间稳定下来。

为了实时的捕捉显示帧率情况,我们选用time库下的clock函数去追踪显示帧率,time库下clock介绍
这里print输出会显示在IDE的串行终端(也就是说只要在IDE中打开串行终端就可以看到实时输出的帧率啦,可以禁用IDE的帧缓冲区,这样还可以再提升点帧率)
下面就是详细的代码啦
import sensor,image,time,lcd
lcd.init()#初始化lcd模块
sensor.reset()#复位和初始化摄像头
sensor.set_vflip(True)#屏幕翻转所见即所得
sensor.set_pixformat(sensor.RGB565)#设置像素格式为彩色RGB565格式,用16个字节表示一帧图像,R,G,B分别占5,6,5
sensor.set_framesize(sensor.QVGA)#设置帧大小为QVGA(320*240)
sensor.skip_frames(time=2000)#等待2000ms让摄像头启动
clock_1=time.clock()#创建一个时钟来追踪FPS(每秒拍摄帧数)
while True:
clock_1.tick() #更新FPS时钟
img=sensor.snapshot()#拍摄一个图片并保存
lcd.display(img)#在LCD上显示拍摄图片
print(clock_1.fps()) #打印输出帧率大小
要注意的是如果没有sensor.set_vflip(True)这一行,在屏幕中显示的图像是镜像图像,看起来会没有那么的好看,所以加上这一行可以让屏幕翻转,所见即所得。
就目前这块板子来看基本上帧率能稳定在14-16帧(开启IDE帧缓冲区的情况),如果进行IDE帧缓冲区,板子的帧率能稳定在24左右,提升效果还是很明显的。如果把彩色图换成灰度图格式可能帧率会跟高一点。
今天的学习笔记就到此为止吧,摄像头的应用在机器视觉中毫无疑问是非常重要的,也是最基础的部分。后面就要逐渐进入到机器视觉部分了,我可能会多次验证编写自己的例程(尽可能多的使用板载模块实现功能)而不是一味的移植官方的例程。后续还会搭载硬件电路配合stm32进行处理(多机通信)没更新就是在搞代码!
















 891
891











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











