







1、算法原理
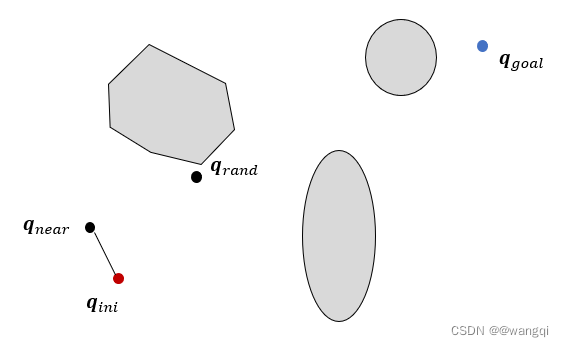
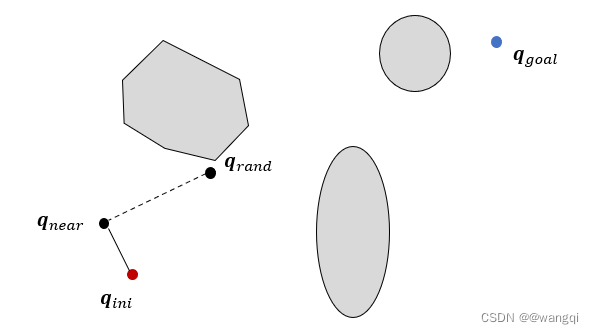
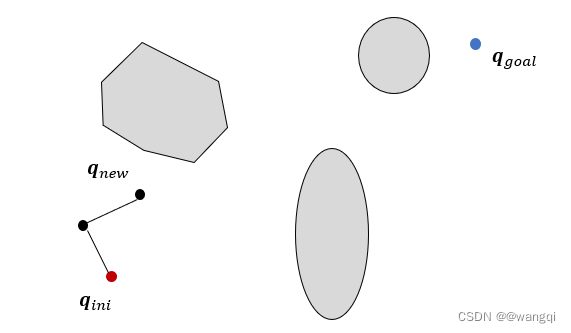
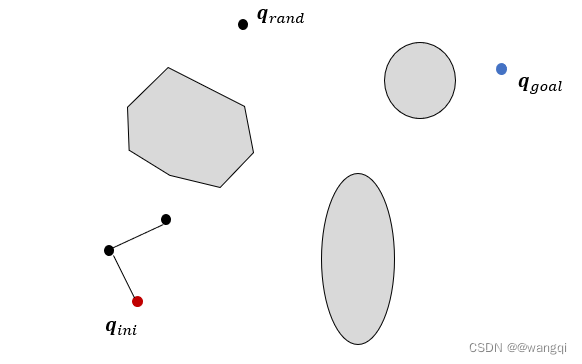
1)将起点加入树,随机扩展一个节点
,并在已有节点中寻找距离其最近的节点
;
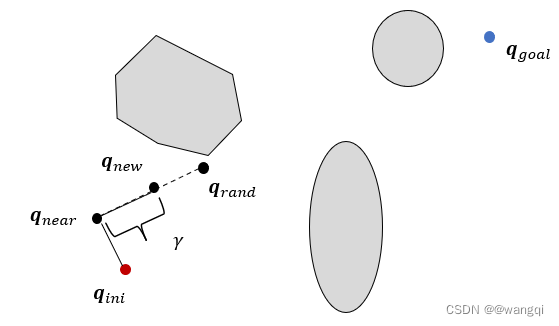
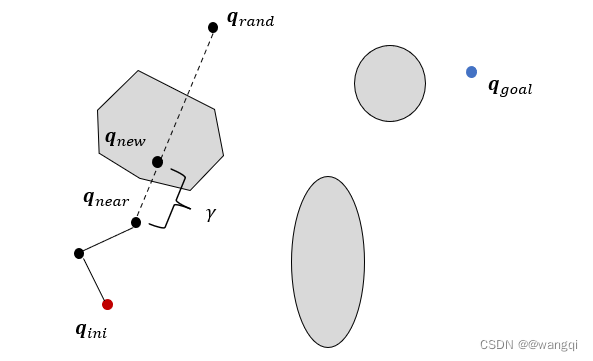
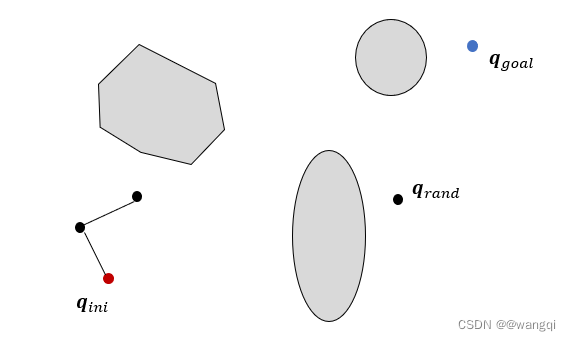
2)在--->
方向上,以采样步长γ扩展,并进行collisionchecking,无碰撞,得到新节点
;有碰撞,重新采样
;
3)计算和
之间距离,当小于某一给定值时,终止采样;
4)从回溯,找到起点
,从而确定从起点到终点的路径。
rrt算法具有概率的完备性,只要采样次数足够多,总可以找到连接起点终点的一条路径;
但在路径搜索过程中,完全没有考虑cost,这会导致找到的路径比较差。
2、matlab代码
clear;
close all;
clc;
%% 载入地图
figure(1);
pic=imread('map.png');
fig=rgb2gray(pic);
imshow(fig);
hold on;
title('RRT* algorithm');
mLength=size(fig,2);
mWidth=size(fig,1);
Point=ginput(2); %获取起点坐标、终点坐标
startPoint=Point(1,:);
goalPoint=Point(2,:);
disp(['起点坐标为:(',num2str(startPoint),')']);
disp(['终点坐标为:(',num2str(goalPoint),')']);
plot(startPoint(1),startPoint(2),'mo','MarkerSize',8,'MarkerFaceColor','m');
plot(goalPoint(1),goalPoint(2),'rp','MarkerSize',8,'MarkerFaceColor','r');
%% 参数初始化
sampleNums=30000; %采样次数
stepLength=20; %采样步长
%将起点加入树
nodes_list(1).position=startPoint;
nodes_list(1).parentind=0;
nodes_list(1).cost=0;
count=0;
for j=1:sampleNums
count=count+1;
%随机采样,rand-->new
node_rand=[mLength*rand,mWidth*rand];
N=size(nodes_list,2); %获取树中当前节点数
minDis=Inf; %初始化树中节点距离newnode的最小距离
for i=1:N
d=norm(node_rand-nodes_list(i).position);
if minDis > d
minDis=d;
ind=i;
end
end
near2rand=(node_rand-nodes_list(ind).position)/norm(node_rand-nodes_list(ind).position)*stepLength;
newnode=nodes_list(ind).position+near2rand;
% collisionchecking
flag=collisionCheck(newnode,nodes_list(ind).position,fig);
if flag
plot(newnode(1),newnode(2),'ro','MarkerFaceColor','r','MarkerSize',2);
plot([nodes_list(ind).position(1),newnode(1)],[nodes_list(ind).position(2),newnode(2)],'b-','LineWidth',1);
nodes_list(N+1).position=newnode;
nodes_list(N+1).parentind=ind;
nodes_list(N+1).cost=nodes_list(ind).cost+norm(near2rand);
if norm(newnode-goalPoint)<=stepLength
nodes_list(N+2).position=goalPoint;
nodes_list(N+2).parentind=N+1;
nodes_list(N+2).cost=nodes_list(N+1).cost+norm(newnode-goalPoint);
plot([newnode(1),goalPoint(1)],[newnode(2),goalPoint(2)],'b-');
break;
end
end
pause(0.0);
end
% 从终点回溯,寻找路径
index=N+2;
while nodes_list(index).parentind~=0
plot([nodes_list(index).position(1),nodes_list(nodes_list(index).parentind).position(1)], ...
[nodes_list(index).position(2),nodes_list(nodes_list(index).parentind).position(2)],'r-',...
'LineWidth',3);
index=nodes_list(index).parentind;
end
if count==sampleNums
disp('超出采样次数');
else
disp(['SUCCESS!采样次数为:',num2str(count)]);
disp(['cost:',num2str(nodes_list(N+2).cost)]);
end
碰撞检测函数
function flag = collisionCheck(newnode,nearnode,map)
%COLLISIONCHECK
% flag==0 有障碍物,拓展失败 flag==1 无障碍物
near2new=newnode-nearnode;
flag=1;
if newnode(1)>=size(map,2)||newnode(1)<=1||newnode(2)>=size(map,1)||newnode(2)<=1
flag=0;
end
for i=0:0.1:1
if flag==0
break;
end
checkingPoint=nearnode+i*near2new;
if checkingPoint(1)>=size(map,2)||checkingPoint(1)<=1||checkingPoint(2)>=size(map,1)||checkingPoint(2)<=1
flag=0;
break;
end
if map(ceil(checkingPoint(2)),ceil(checkingPoint(1)))==0||map(ceil(checkingPoint(2)),floor(checkingPoint(1)))==0 ...
||map(floor(checkingPoint(2)),ceil(checkingPoint(1)))==0||map(floor(checkingPoint(2)),floor(checkingPoint(1)))==0
flag=0;
break;
end
end
欢迎批评指正!















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









