






 超级会员免费看
超级会员免费看
欢迎大家关注我的B站:
偷吃薯片的Zheng同学的个人空间-偷吃薯片的Zheng同学个人主页-哔哩哔哩视频 (bilibili.com)
目录
RRT*是一个常用的路径规划器,这是一个与RRT*相结合的论文
【ITSC 2023】一种在狭窄空间内快速准确的碰撞检测方法
1 RRT算法的简介
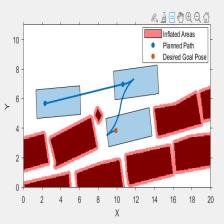
天下武功唯快不破,快是 RRT 的最大优势。RRT 的思想是快速扩张一群像树一样的路径以探索空间的大部分区域,找到可行的路径。RRT 算法是一种对状态空间随机采样
 本文介绍了RRT算法的基本原理,包括算法流程、伪代码和流程图,并详细阐述了RRT算法在MATLAB环境中的实现过程,包括测试地图、distance函数、RRT算法的实现及动画效果展示。同时,指出了RRT算法的缺陷,如非最优路径、未考虑运动学模型等,为后续的改进算法奠定了基础。
本文介绍了RRT算法的基本原理,包括算法流程、伪代码和流程图,并详细阐述了RRT算法在MATLAB环境中的实现过程,包括测试地图、distance函数、RRT算法的实现及动画效果展示。同时,指出了RRT算法的缺陷,如非最优路径、未考虑运动学模型等,为后续的改进算法奠定了基础。
欢迎大家关注我的B站:
偷吃薯片的Zheng同学的个人空间-偷吃薯片的Zheng同学个人主页-哔哩哔哩视频 (bilibili.com)
目录
RRT*是一个常用的路径规划器,这是一个与RRT*相结合的论文
【ITSC 2023】一种在狭窄空间内快速准确的碰撞检测方法
天下武功唯快不破,快是 RRT 的最大优势。RRT 的思想是快速扩张一群像树一样的路径以探索空间的大部分区域,找到可行的路径。RRT 算法是一种对状态空间随机采样
 5294
4万+
5294
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文
























