







一、使用rviz和gazebo实时仿真
本节我们将使用三维可视化工具rviz(The Robot Visualization Tool)来实时观测gazebo仿真中的激光雷达数据。
二、打开仿真gazebo项目
如果您已经按照 《Ubuntu20.04环境下的ROS进阶学习0》-CSDN博客 如果您已经按照上次的文章完成操作的话,您可以直接进行一下操作。
1、将代码更新
cd ~/catkin_ws/src/wpr_simulation
git pull 这个命令将让您的项目升级为最新

2、编译项目
cd ~/catkin_ws
catkin_make
source devel/setup.bash 值得一提的是,这一步如果您按照了之前的文章来做,可以省略。(《Ubuntu20.04环境下的ROS学习笔记4》-CSDN博客)
3、运行项目
roslaunch wpr_simulation wpb_simple.launch (这里如果您打开失败,您需要reboot一下)
这里您将打开您的gazebo仿真软件。

三、运行rviz实时观测
1、打开rviz
ctrl + shift + O 可以水平分屏如果您是超级终端Terminator的话(《Ubuntu20.04环境下的ROS进阶学习1》-CSDN博客)
rviz 打开三维可视化软件
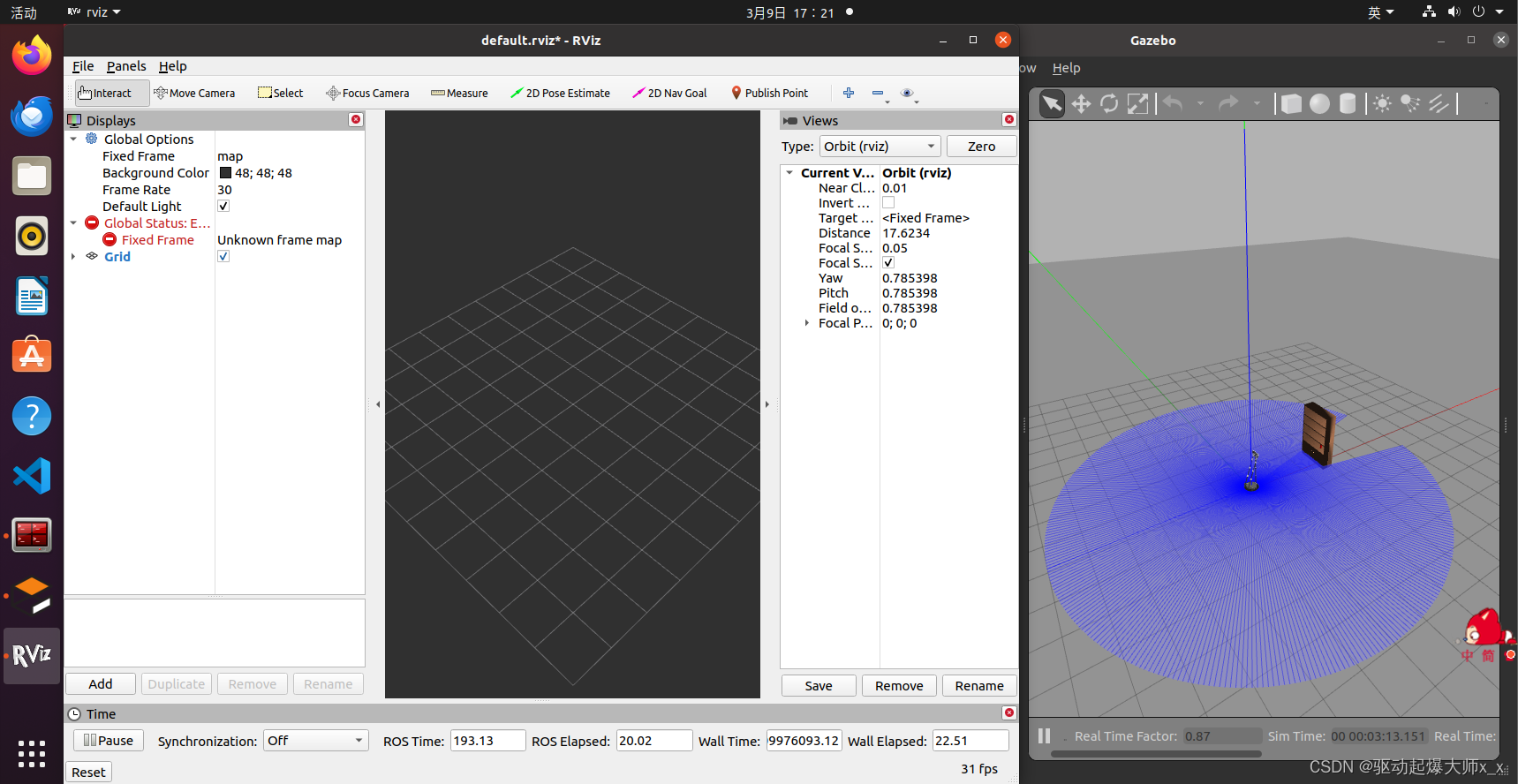
2、配置rviz
刚进rviz的时候里面是空的,我们需要做出以下配置。
a、修改Fixed Frame
将map改为base_footprint
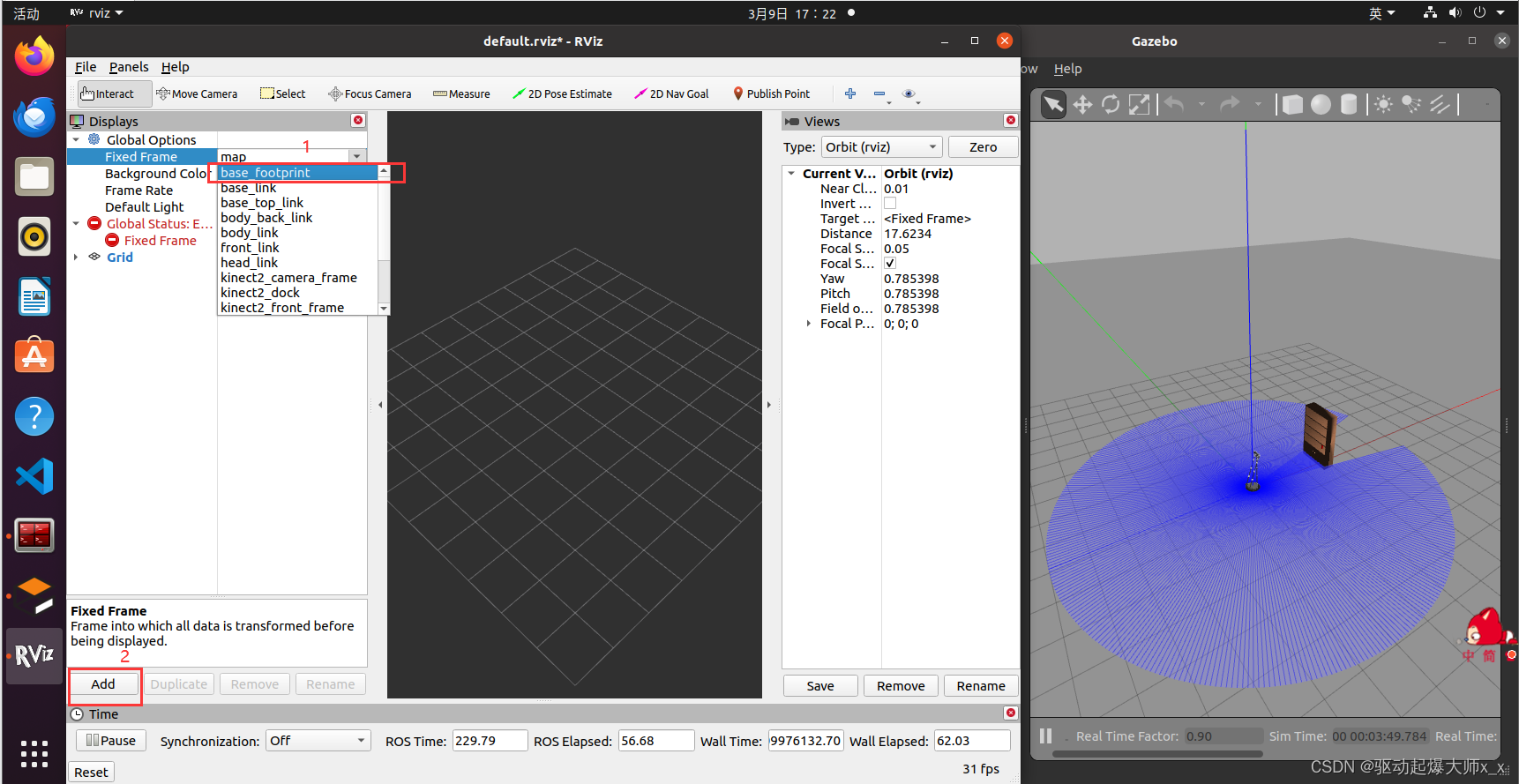
b、add RobotModel
当添加了机器人实体后您将会在rviz上看到您的小车。

c、add LaserScan
这里我们先添加雷达,再配置雷达的话题topic,选择/scan,同时修改检测结果的size。

修改话题:

修改size将它改为0.03:

d、调整视角
rviz调整视角主要使用鼠标滑轮和鼠标左键。
左键按住不放 -> 旋转视角
鼠标滑轮 -> 放大缩小视角
鼠标中间(按住滑轮) -> 平移视角
而在gazebo中 左键和鼠标中间对应的功能正好相反,您可以调节下视角。

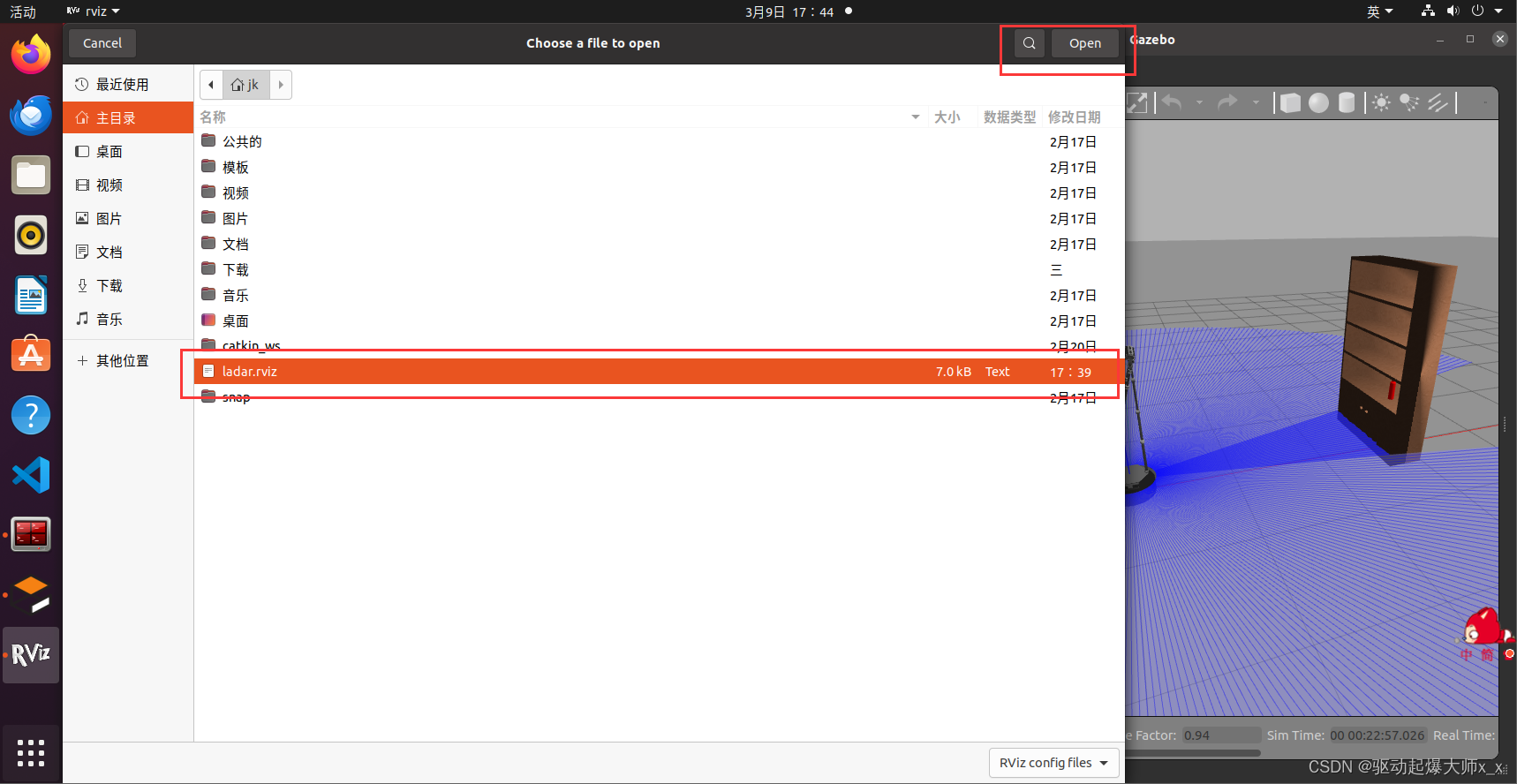
3、保存配置
每次进来都要进行以上配置十分麻烦,我们可以将配置保存为文件,下次我们一进来就是这个配置。


我们回到终端关闭rviz,这里不要关闭gazebo(他是大哥启动消耗资源多,还容易报错)。
再次打开rviz,使用刚才的配置。
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









