







一、Hector_Mapping构建二维地图
在前面我们已经介绍了如何使用激光雷达来扫描地图,如何用激光雷达来建造地图,本节我们将两者结合起来,通过Hector_Mapping功能包实现SLAM。
二、在仿真环境中进行2D SLAM
1、下载Hector_Mapping
sudo apt install ros-noetic-hector-mapping
这里是去ROS官方应用商店下载,您可以参考之前的博客了解相关内容( 《Ubuntu20.04环境下的ROS进阶学习0》-CSDN博客 )
2、运行gazebo仿真环境
roslaunch wpr_simulation wpb_stage_slam.launch
如果您没有此功能包,您可以去看这篇博客( 《Ubuntu20.04环境下的ROS进阶学习0》-CSDN博客 )

3、运行Hector_Mapping
rosrun hector_mapping hector_mapping
4、运行rviz三维图形化工具
rosrun rviz rviz
a、添加机器人模型
add RobotModel

b、添加激光雷达扫描测距
add LaserScan
这里将话题改为 /scan 同时将size改为0.03


通过鼠标左键和鼠标中键来调整视角,如果您想了解详细内容可以看我之前的一篇博客 ( 《Ubuntu20.04环境下的ROS进阶学习2》-CSDN博客 )
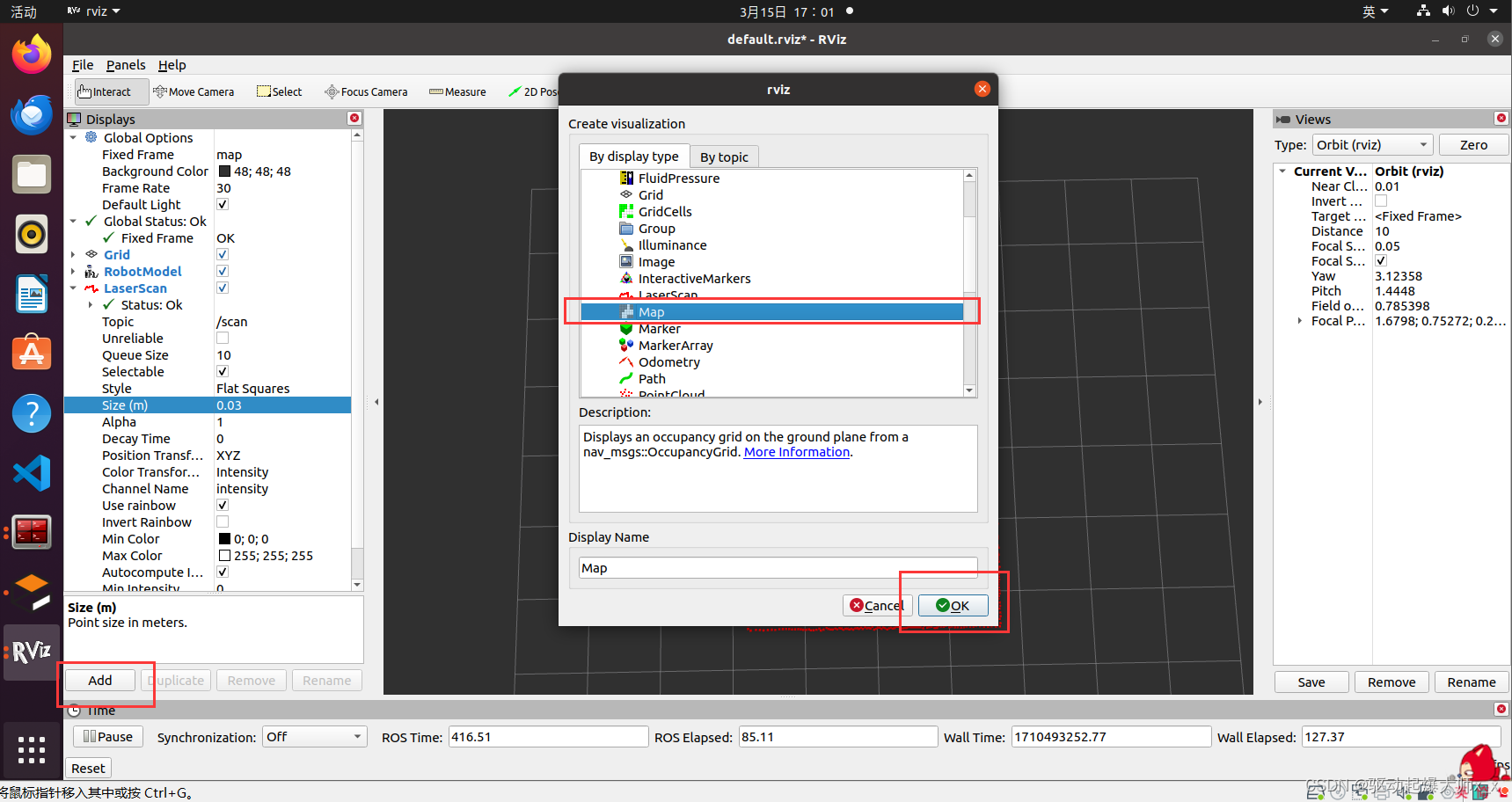
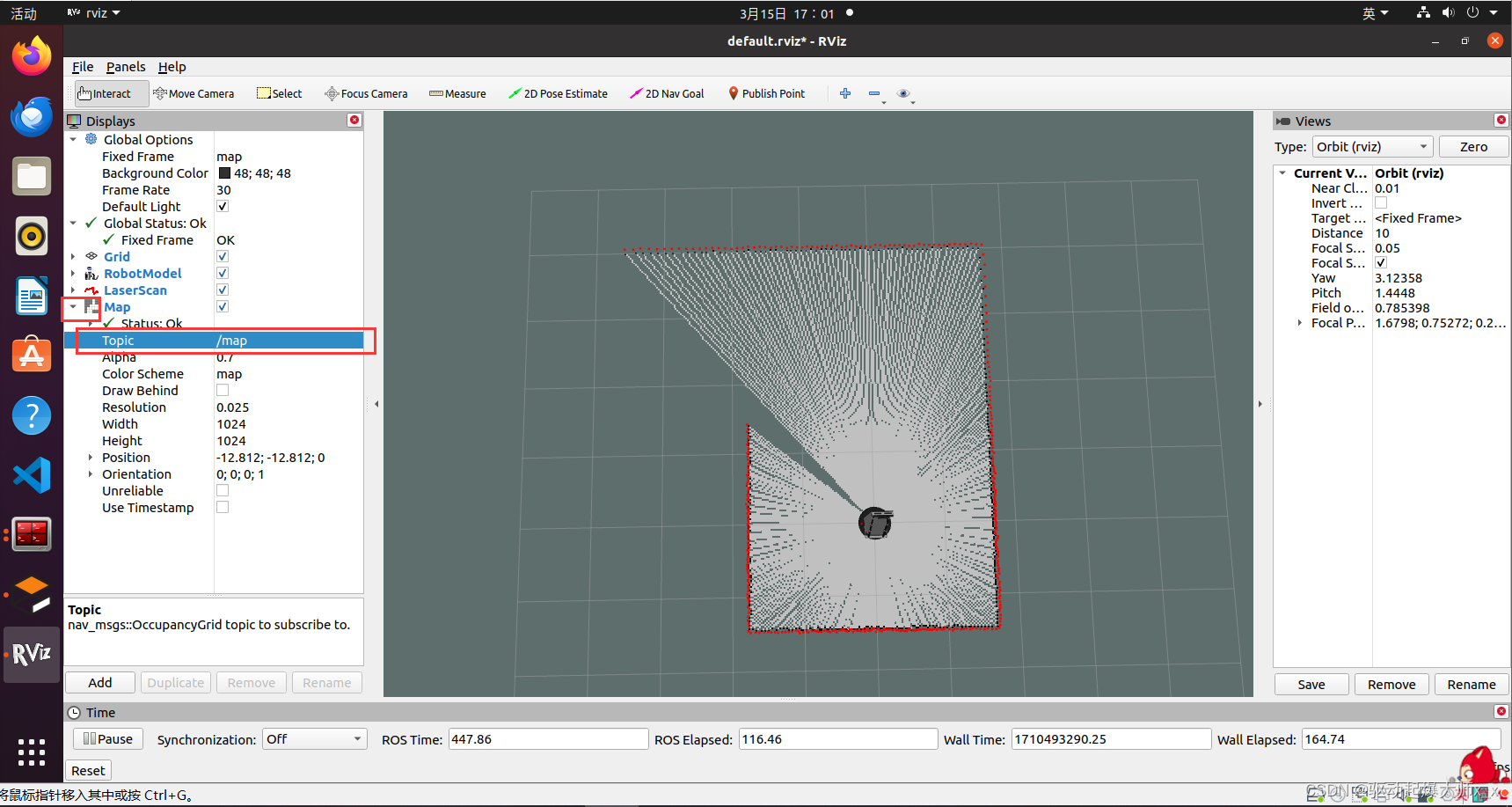
c、添加地图
add Map
将地图的话题改为 /Map
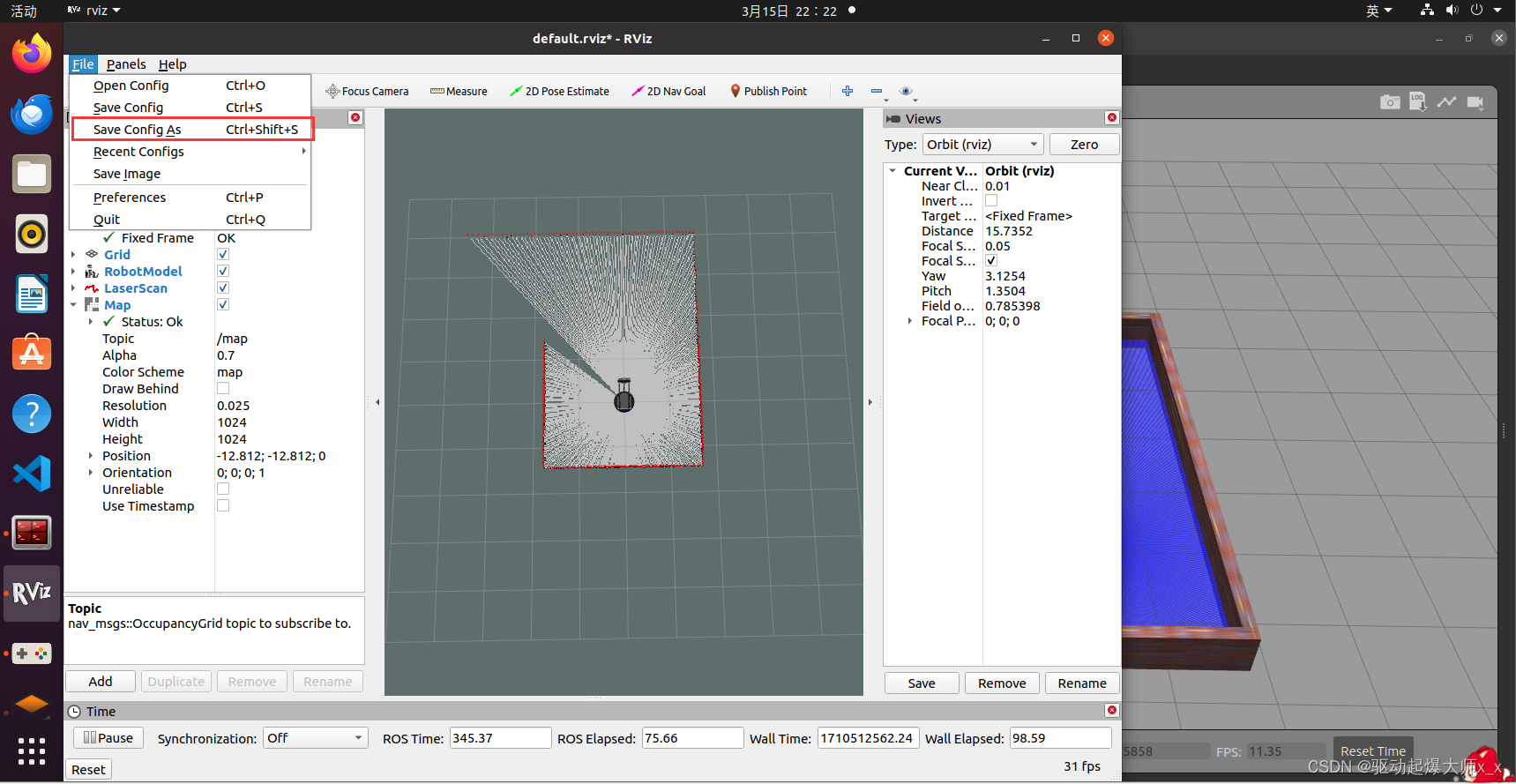
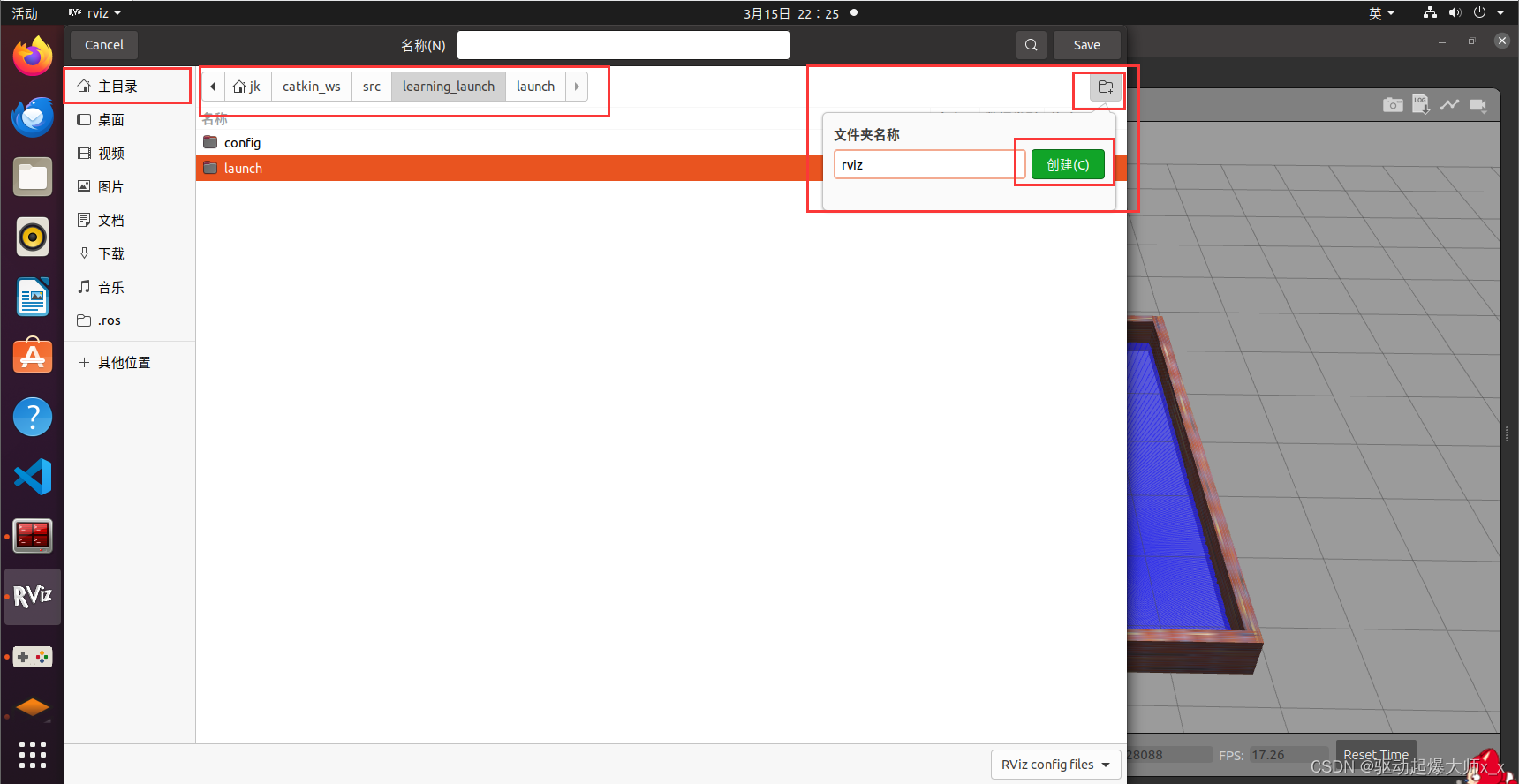
d、保存rviz配置

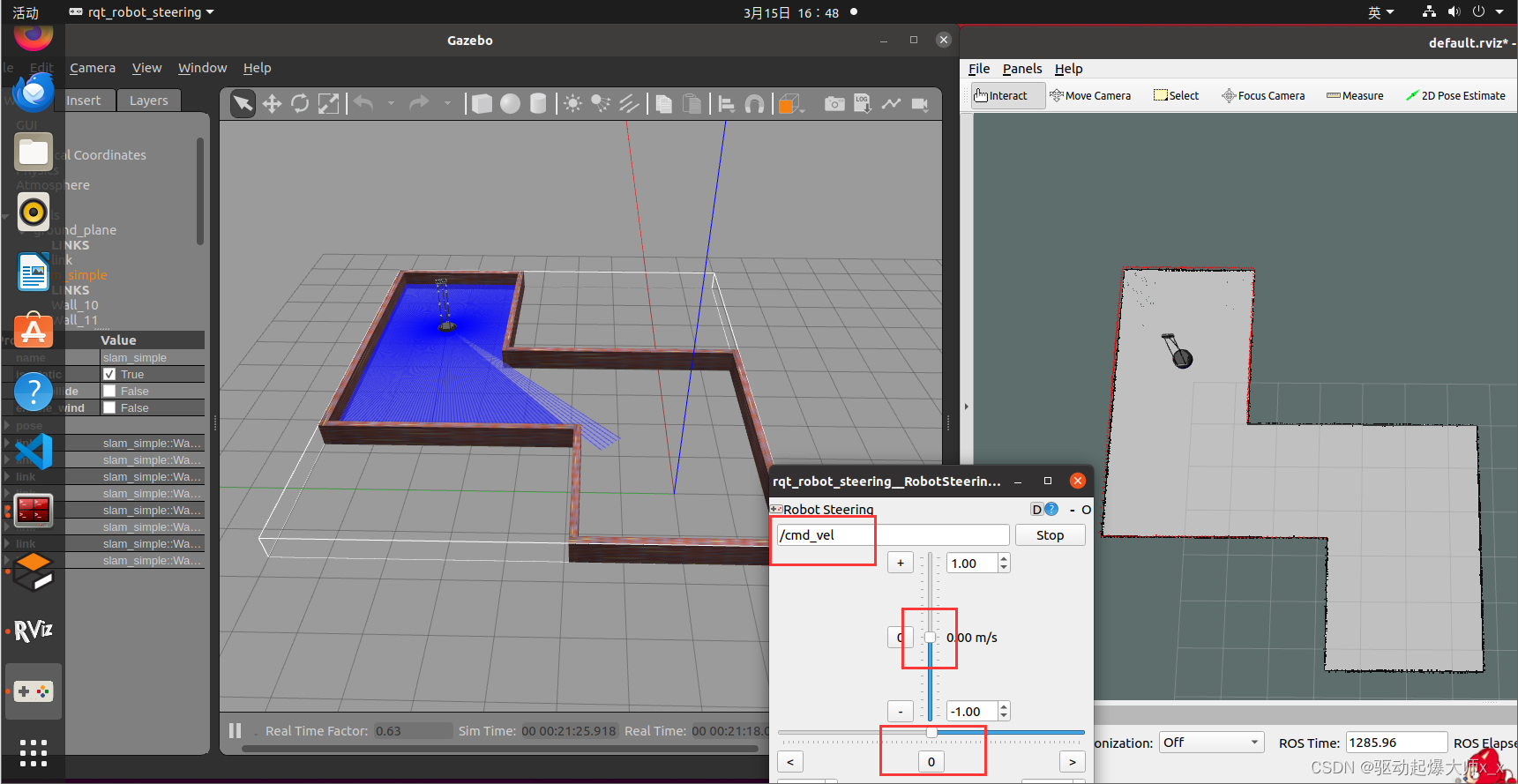
5、运行机器人运动工具
rosrun rqt_robot_steering rqt_robot_steering
控制机器人运动将整个地图建造出来。
三、使用launch文件并修改Hector_Mapping相关参数设置
1、创建新的功能包
cd ~/catkin_ws/src
catkin_creat_pkg learning_launch
cd learning_launch
mkdir launch
如果您之前按照《Ubuntu20.04环境下的ROS学习笔记13》-CSDN博客 来干的话您也有这样的功能包。
2、编写launch文件的代码
cd ~/catkin_ws/src/learning_launch/launch
touch hector_slam.launch
<launch>
<include file = "$(find wpr_simulation)/launch/wpb_stage_slam.launch"/>
<node pkg = "hector_mapping" type = "hector_mapping" name = "hector_mapping"/>
<node pkg = "rviz" type = "rviz" name = "rviz" args = "-d $(find learning_launch)/rviz/hector_slam.rviz"/>
<node pkg = "rqt_robot_steering" type = "rqt_robot_steering" name = "rqt_robot_steering"/>
</launch>
3、运行launch文件
launch文件大部分都不用编译,里面的可执行文件都是现成了,除非您修改过代码。
这里出于保险您可以编译下
cd ~/catkin_ws
catkin_make
source devel/setup.bash 值得一提的是,这一步如果您按照了之前的文章来做,可以省略。(《Ubuntu20.04环境下的ROS学习笔记4》-CSDN博客)
到这里编译完成。
roslaunch learning_launch hector_slam.launch
4、对Hector_Mapping进行参数配置
a、了解Hector_Mapping参数
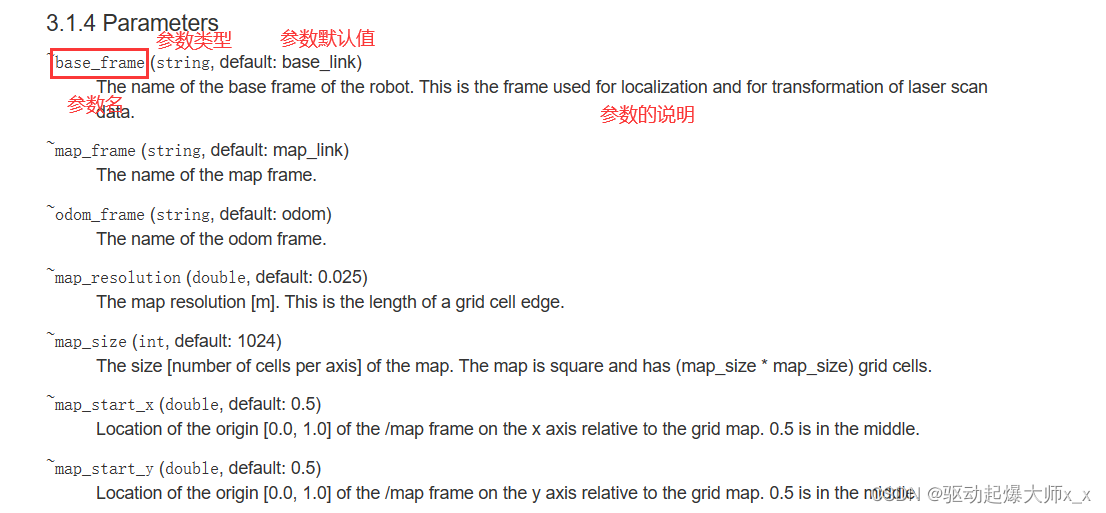
首先登录 index.ros.org 网站搜索一下Hector_Mapping功能包。您也可以直接搜这个网址 hector_mapping - ROS Wiki ,翻到Parameters列表,~后表示参数名,括号里的是(参数的类型 , default:参数的默认值) 再下面就是参数的类型说明。
b、介绍几个简单的参数
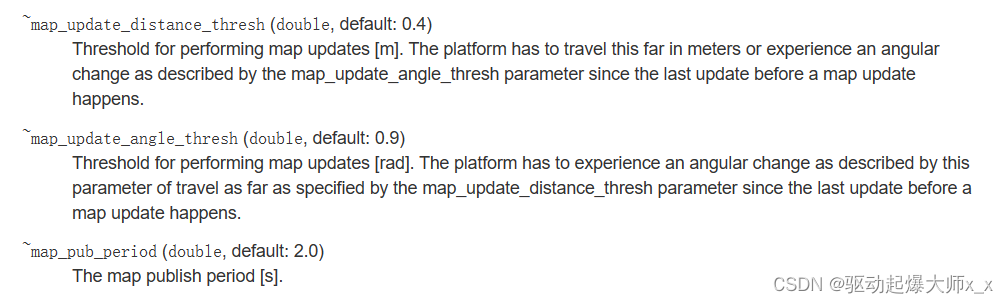
1、map_update_distance_thresh
map_update_distance_thresh这个参数是一个双精度浮点数,默认是0.4m。
每次地图更新后,机器人必须位移超过这个阈值,并产生超过map_update_angle_thresh阈值的角度,才会再次更新地图。
2、map_update_angle_thresh
map_update_angle_thresh这个参数是一个双精度浮点数,默认是0.9rad。
每次地图更新后,机器人必须转动超过这个阈值,并产生超过map_update_distance_thresh阈值的位移,才会再次更新地图。
3、map_pub_period
map_pub_period这个参数是一个双精度浮点数,默认是2s
这是地图更新的周期。
您可以修改您的hector_slam.launch文件,实现快速建图,当然也会更消耗资源。
<launch>
<include file = "$(find wpr_simulation)/launch/wpb_stage_slam.launch"/>
<node pkg = "hector_mapping" type = "hector_mapping" name = "hector_mapping">
<param name = "map_update_distance_thresh" value = "0.1"/>
<param name = "map_update_angle_thresh" value = "0.1"/>
<param name = "map_pub_period" value = "0.2"/>
</node>
<node pkg = "rviz" type = "rviz" name = "rviz" args = "-d $(find learning_launch)/rviz/hector_slam.rviz"/>
<node pkg = "rqt_robot_steering" type = "rqt_robot_steering" name = "rqt_robot_steering"/>
</launch>
四、参考
Hector_Mapping 年轻人的第一次SLAM建图_哔哩哔哩_bilibili














 7766
7766











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









