






2 第一次发文章,有问题希望大家友善指出,谢谢大家:)!!!!!
- 创建一个Python的文件(name:Turtle_client_method.py)路径:功能包名/scripts/Method
#1.导包 import rospy import math from turtlesim.srv import * from std_srvs.srv import * from geometry_msgs.msg import Twist # 1.创造小乌龟函数 def create_Turtle(x,y,z,name,client): client = rospy.ServiceProxy("/spawn",Spawn) # 等待服务启动 client.wait_for_service() # 定义服务响应 response = SpawnResponse() # 定义服务请求 req = SpawnRequest() # 设置服务参数 req.x = x req.y = y req.theta = (z/180)*math.pi # req.theta = z req.name = name try: response = client.call(req) # 调用服务 rospy.loginfo("创建成功: x=%.2f y=%.2f z=%.2f %s",x,y,(z/math.pi)*180,response) except Exception as e: # 调用失败,抛出异常 rospy.loginfo("服务调用失败....") # rospy.loginfo("%s",response) # 2.清除小乌龟函数 def clear_Turtle(): clear_client = rospy.ServiceProxy("/clear",Empty) clear_client.wait_for_service() try: clear_client.call() rospy.loginfo("清除轨迹服务调用成功") except Exception as e: rospy.loginfo("服务调用失败") # 3.重置小乌龟函数 def reset_Turtle(): reset_client = rospy.ServiceProxy("/reset",Empty) reset_client.wait_for_service() try: reset_client.call() rospy.loginfo("重置服务调用成功") except Exception as e: rospy.loginfo("重置服务调用失败") # 4.杀死小乌龟函数 def kill_Turtle(name,client): # 创建服务客户端 client=rospy.ServiceProxy("/kill",Kill) # 等待服务启动 client.wait_for_service() response = KillRequest() # 定义服务请求 req = KillRequest() req.name=name try: client.call(req) rospy.loginfo("杀死成功: name:%s",name) except Exception as e: rospy.loginfo("7.杀死服务调用失败....") # 5.移动参数函数 def doMove(x,z,name): str="/"+name+"/cmd_vel" pub=rospy.Publisher(str,Twist,queue_size=10) rate=rospy.Rate(1) msg=Twist() rate.sleep() msg.linear.x =x msg.angular.z =math.pi*(z/180) pub.publish(msg) # 6.改变海龟运行轨迹的颜色和宽度 def set_pen_Turtle(r,g,b,width,off,name): str ="/"+name+"/set_pen" client = rospy.ServiceProxy(str,SetPen) # 等待服务启动 client.wait_for_service() # 定义服务响应 response = SetPenResponse() # 定义服务请求 req = SetPenRequest() # 设置服务参数 req.r = r req.g = g req.b = b req.width = width req.off =off try: response = client.call(req) # 调用服务 rospy.loginfo("修改成功: r=%d g=%d b=%d width=%d off=%d",r,g,b,width,off) # rospy.loginfo("%s",response) except Exception as e: # 调用失败,抛出异常 rospy.loginfo("修改服务调用失败") # 7.改变海龟位置 def Absolute_Turtle(x,y,theta,name): str ="/"+name+"/teleport_absolute" # client = rospy.ServiceProxy("/turtle1/teleport_absolute",TeleportAbsolute) client = rospy.ServiceProxy(str,TeleportAbsolute) # 等待服务启动 client.wait_for_service() # 定义服务响应 response = TeleportAbsoluteResponse() # 定义服务请求 req = TeleportAbsoluteRequest() # 设置服务参数 req.x = x req.y = y req.theta = (theta/180)*math.pi # req.theta = theta try: response = client.call(req) # 调用服务 rospy.loginfo("%s 位置修改成功: x=%.2f y=%.2f theta=%.2f度",name,x,y,theta) # rospy.loginfo("%d",response) except Exception as e: # 调用失败,抛出异常 rospy.loginfo("修改服务调用失败") # 8.移动海龟到指定坐标 def Request_Turtle(linear,angular,name): str ="/"+name+"/teleport_relative" client = rospy.ServiceProxy(str,TeleportRelative) # 等待服务启动 client.wait_for_service() # 定义服务响应 response = TeleportRelativeResponse() # 定义服务请求 req = TeleportRelativeRequest() # 设置服务参数 req.linear = linear req.angular = angular try: response = client.call(req) # 调用服务 rospy.loginfo("%s 速度成功: rlinear=%.2f angular=%.2f ",name,linear,angular) # rospy.loginfo("%d",response) except Exception as e: # 调用失败,抛出异常 rospy.loginfo("修改服务调用失败") - 创建第二个Python文件(name:Draw_face.py)路径:功能包名/scripts/Method
import ntpath from numpy import rate import rospy import math from turtlesim.srv import * from std_srvs.srv import * from geometry_msgs.msg import Twist import Method.Turtle_client_method as Turtle_client_method def draw_face_smile(): Turtle_client_method.reset_Turtle() Turtle_client_method.kill_Turtle("turtle1") Turtle_client_method.create_Turtle(6,2,0,"turtle1") Turtle_client_method.set_pen_Turtle(255,0,0,10,"turtle1",0) Turtle_client_method.doMove(6*math.pi,360,"turtle1") Turtle_client_method.kill_Turtle("turtle1") Turtle_client_method.create_Turtle(4,6,90,"turtle1") Turtle_client_method.set_pen_Turtle(255,255,0,10,"turtle1",0) Turtle_client_method.doMove(1*math.pi,-360,"turtle1") Turtle_client_method.kill_Turtle("turtle1") Turtle_client_method.create_Turtle(7.75,6,90,"turtle1") Turtle_client_method.set_pen_Turtle(255,255,0,10,"turtle1",0) Turtle_client_method.doMove(1*math.pi,360,"turtle1") Turtle_client_method.kill_Turtle("turtle1") Turtle_client_method.create_Turtle(4,3.5,-45,"turtle1") Turtle_client_method.set_pen_Turtle(0,255,255,15,"turtle1",0) Turtle_client_method.doMove(4,90,"turtle1") Turtle_client_method.kill_Turtle("turtle1") def draw_face_cry(): Turtle_client_method.reset_Turtle() Turtle_client_method.kill_Turtle("turtle1") Turtle_client_method.create_Turtle(6,2,0,"turtle1") Turtle_client_method.set_pen_Turtle(255,0,0,10,"turtle1",0) Turtle_client_method.doMove(6*math.pi,360,"turtle1") Turtle_client_method.kill_Turtle("turtle1") Turtle_client_method.create_Turtle(4,6,90,"turtle1") Turtle_client_method.set_pen_Turtle(255,255,0,10,"turtle1",0) Turtle_client_method.doMove(1*math.pi,-360,"turtle1") Turtle_client_method.kill_Turtle("turtle1") Turtle_client_method.create_Turtle(7.75,6,90,"turtle1") Turtle_client_method.set_pen_Turtle(255,255,0,10,"turtle1",0) Turtle_client_method.doMove(1*math.pi,360,"turtle1") Turtle_client_method.kill_Turtle("turtle1") Turtle_client_method.create_Turtle(4.5,3.5,45,"turtle1") Turtle_client_method.set_pen_Turtle(0,255,255,15,"turtle1",0) Turtle_client_method.doMove(3,-90,"turtle1") Turtle_client_method.kill_Turtle("turtle1") def draw_face_zdy(): Turtle_client_method.reset_Turtle() Turtle_client_method.kill_Turtle("turtle1") Turtle_client_method.create_Turtle(6,2,0,"turtle1") Turtle_client_method.set_pen_Turtle(255,0,0,10,"turtle1",0) Turtle_client_method.doMove(6*math.pi,360,"turtle1") Turtle_client_method.kill_Turtle("turtle1") Turtle_client_method.create_Turtle(4,6,90,"turtle1") Turtle_client_method.set_pen_Turtle(255,255,0,10,"turtle1",0) Turtle_client_method.doMove(1*math.pi,-360,"turtle1") Turtle_client_method.kill_Turtle("turtle1") Turtle_client_method.create_Turtle(7.75,6,90,"turtle1") Turtle_client_method.set_pen_Turtle(255,255,0,10,"turtle1",0) Turtle_client_method.doMove(1*math.pi,360,"turtle1") Turtle_client_method.kill_Turtle("turtle1") Turtle_client_method.create_Turtle(4.5,3.5,0,"turtle1") Turtle_client_method.set_pen_Turtle(0,255,255,15,"turtle1",0) Turtle_client_method.doMove(2.5,0,"turtle1") Turtle_client_method.kill_Turtle("turtle1") def draw_face_taiji(): Turtle_client_method.reset_Turtle() Turtle_client_method.kill_Turtle("turtle1") # Turtle_client_method.create_Turtle(5,5,90,"turtle1") # Turtle_client_method.set_pen_Turtle(255,255,255,100,"turtle1",0) # Turtle_client_method.doMove(1*math.pi,-180,"turtle1") # Turtle_client_method.doMove(1*math.pi,-180,"turtle1") # Turtle_client_method.kill_Turtle("turtle1") Turtle_client_method.create_Turtle(4,5,90,"turtle1") Turtle_client_method.set_pen_Turtle(0,0,0,20,"turtle1",0) Turtle_client_method.doMove(0.5*math.pi,-150,"turtle1") # Turtle_client_method.doMove(1*math.pi,-180,"turtle1") Turtle_client_method.kill_Turtle("turtle1") - 创建第三个Python文件(name:create_test01_p.py)路径:功能包名/scripts
#1.导包 import ntpath from numpy import rate import rospy import math from turtlesim.srv import * from std_srvs.srv import * from geometry_msgs.msg import Twist import Method.Turtle_client_method as Turtle_client_method import Method.Draw_face as Draw_face if __name__ == "__main__": # 2.初始化 ros 节点 rospy.init_node("create_face_p") # Turtle_client_method.kill_Turtle("turtle1") pub=rospy.Publisher("/turtle1/cmd_vel",Twist,queue_size=10) rate =rospy.Rate(1) # Draw_face.draw_face_smile() # Draw_face.draw_face_zdy() Draw_face.draw_face_cry() # Draw_face.draw_face_taiji() - 配置CMakeLists
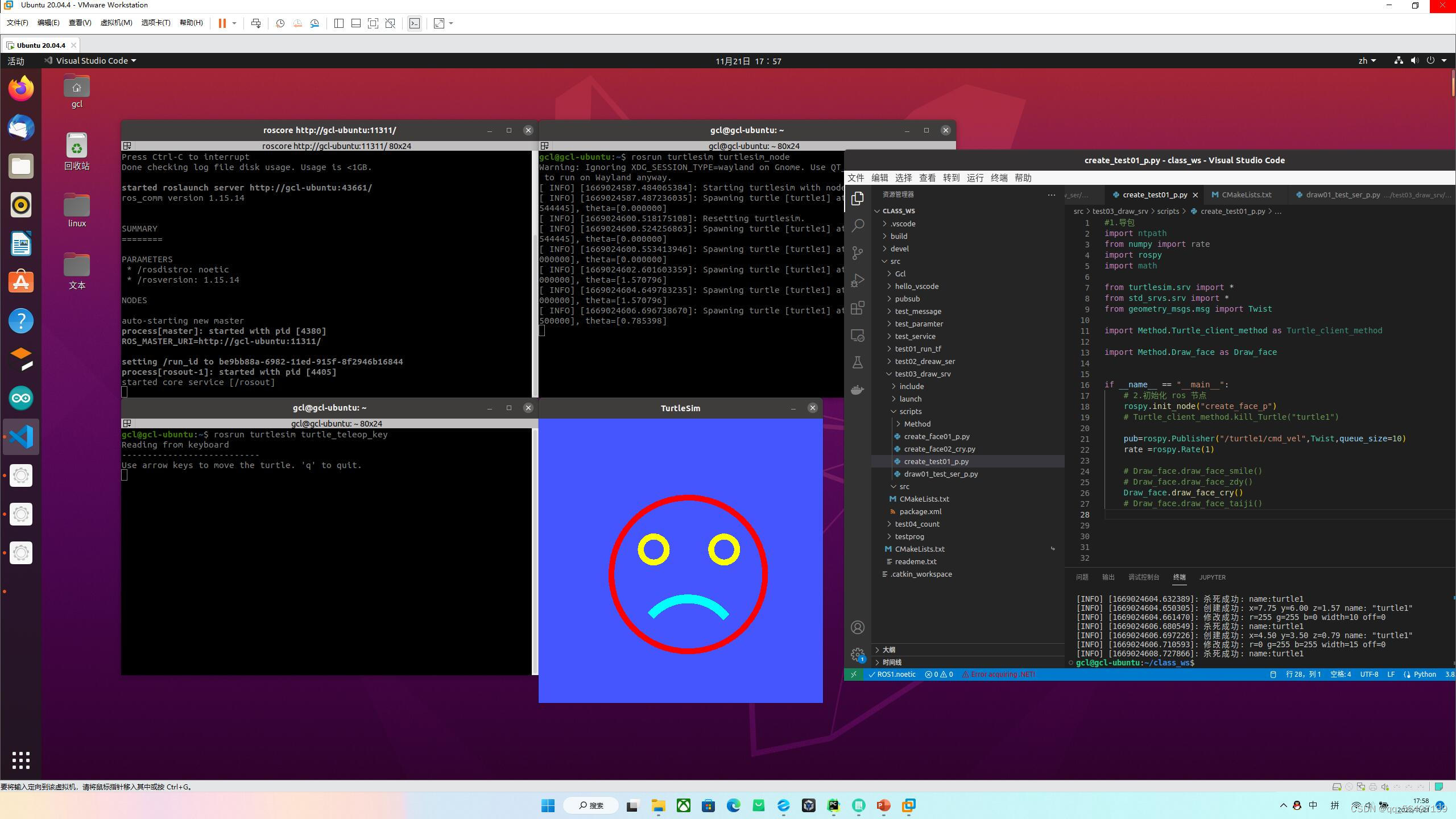
catkin_install_python(PROGRAMS scripts/draw01_test_ser_p.py scripts/create_face01_p.py scripts/create_face02_cry.py DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION} ) - 运行效果















 1395
1395











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









