






麦克纳姆轮
麦克纳姆轮简介
麦克纳姆轮是一种由轮毂和辊子构成的一种特殊结构的轮子,麦克纳姆轮的结构是由轮毂和周围环绕轮毂的辊子组成。轮毂与机器人的电机相连,辊子是没有动力的从动轮。辊子与轮毂之间也不是随意连接的,辊子的轴线与轮毂的轴线呈45°夹角。
在一个机器人移动底盘中,通常有分为左旋和右旋两种相对称的麦克纳姆轮。这两种结构互为镜像关系,如下图:


麦克纳姆轮在移动机器人中的应用
如果想要使用麦克纳姆轮完成机器人的移动,我们需要使用以下方式来安装轮子
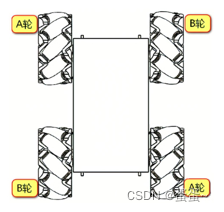
在上图中A轮和B轮分别是左旋和右旋的麦克纳姆轮。
坐标系建立
对上述移动底盘进行坐标系的建立,并将四个轮子分别命名为轮1、轮2、轮3、轮4.可以获得如下坐标系。同时以轮2为研究对象
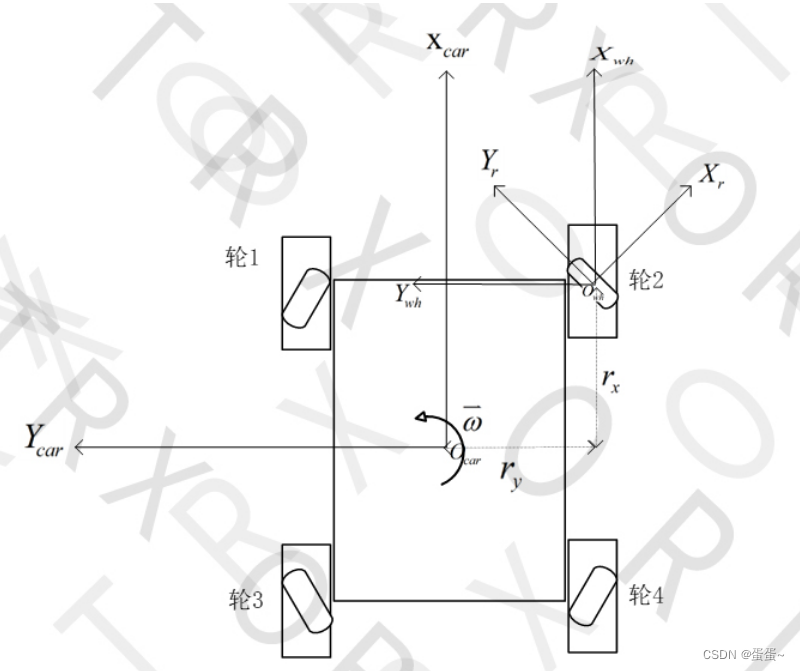
所涉及坐标系均为右手系,由于移动机器人底盘仅为2维运动,不涉及Z轴运动,所以在图中没有标出Z轴坐标。
其中坐标系 是以机器人底盘中心为坐标表原点,以前进方向作为X轴,机器人左侧作为Y轴建立的坐标系,坐标系 是以轮2的中心作为坐标系原点, 坐标系是以辊子平行方向为Y轴,辊子垂直方向作为X轴建立的坐标轴。
是以机器人底盘中心为坐标表原点,以前进方向作为X轴,机器人左侧作为Y轴建立的坐标系,坐标系 是以轮2的中心作为坐标系原点, 坐标系是以辊子平行方向为Y轴,辊子垂直方向作为X轴建立的坐标轴。
 为小车的角速度逆时针方向为正,ry为机器人底盘中心距离车轮中心的距离,r_y为机器人底盘中心与车轮中心的Y方向距离。由于麦克纳姆轮结构的原因,所以机器人车轮中心在坐标系
为小车的角速度逆时针方向为正,ry为机器人底盘中心距离车轮中心的距离,r_y为机器人底盘中心与车轮中心的Y方向距离。由于麦克纳姆轮结构的原因,所以机器人车轮中心在坐标系  的坐标和与地面接触的辊子接触点在坐标系
的坐标和与地面接触的辊子接触点在坐标系 的坐标点一样。
的坐标点一样。
运动学解算
通过以上分析,可以得出机器人底盘中心到轮子的速度传递公式为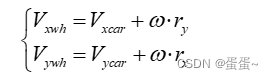
由于辊子的安装方式是与轮毂的轴线的夹角45°角度安装,所以建立的坐标系之间的夹角也为45°。所以轮子到辊子之间的速度传递如下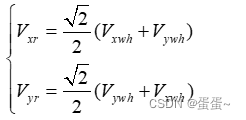
由以上量式可以得到 所以在轮2中的辊子速度合成方向为正前方,大小为
所以在轮2中的辊子速度合成方向为正前方,大小为

对其他的三个轮子按照同样的分析方式可以得到其速度的方向如下图
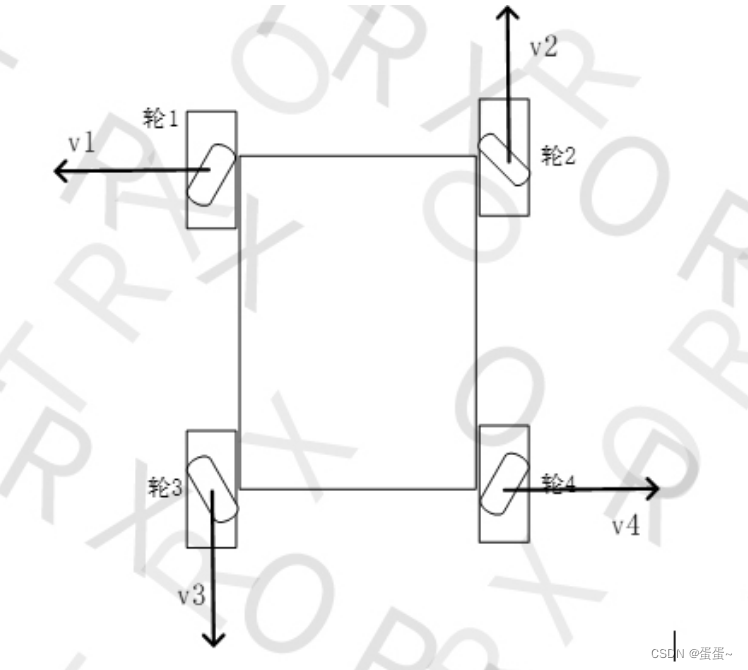
速度如下式
机器人速度
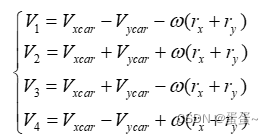
根据逆运动学分析可以解得机器人的速度为
















 2585
2585











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









