






搭建地图环境是gazebo的基础功能
打开gazebo 可以在终端输入指令
打开的时候一定要有sudo,不然有可能在后面保存的时候出现画面卡住不动的情况
~$ sudo gazebo
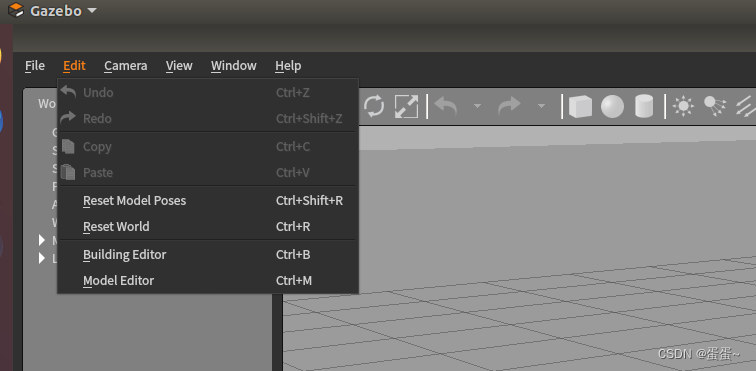
点击building Editor
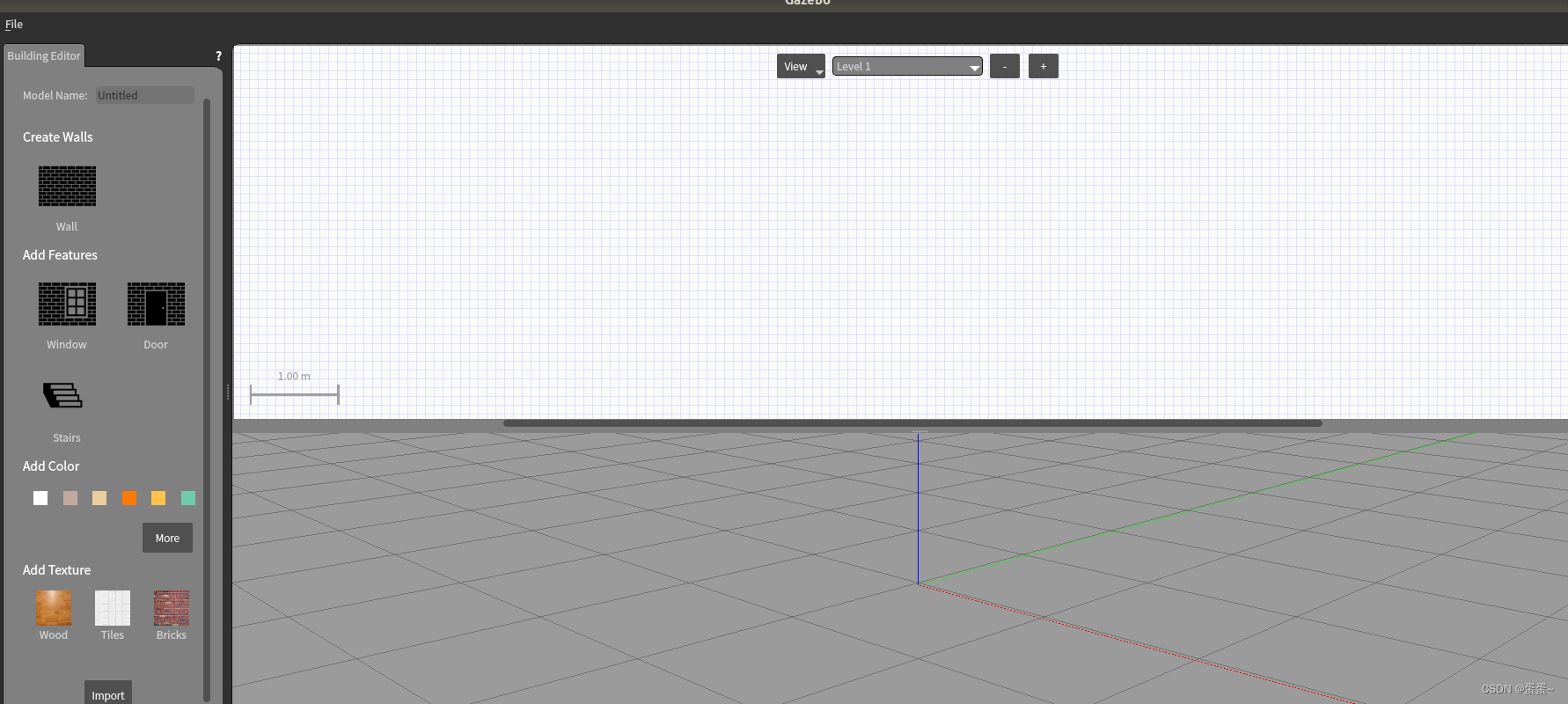
现在就可以进行构建地图
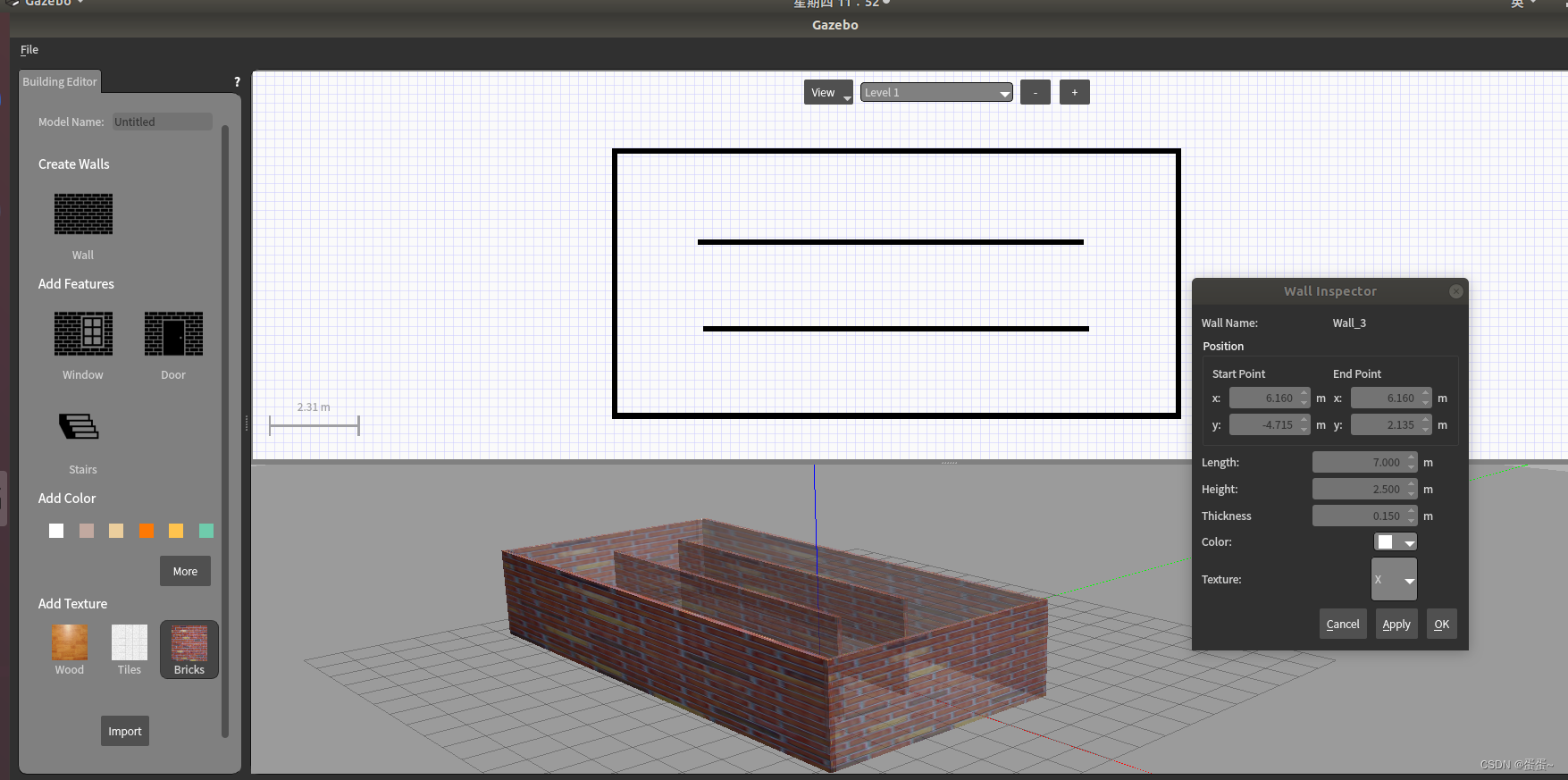
右键单击可以改变选中部分的属性
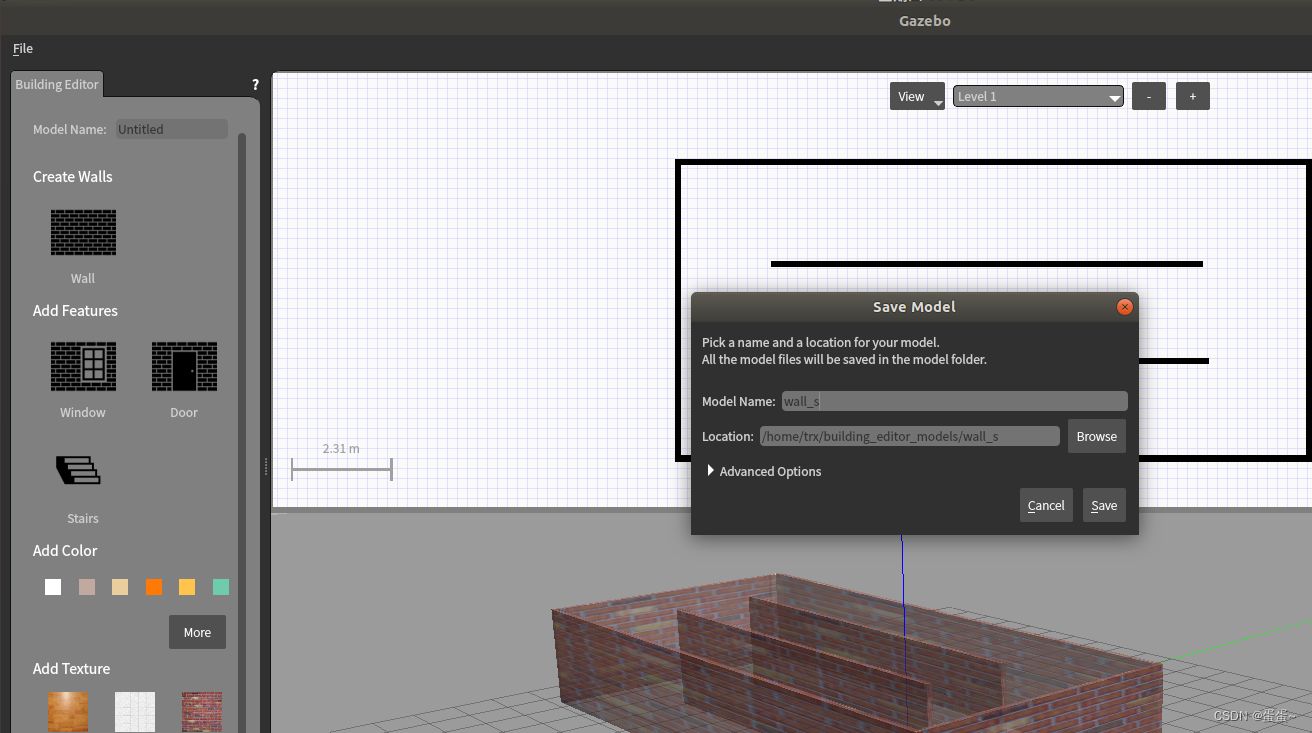
点击右上角File 保存,保存路径使用默认的即可
按ctrl+X退出模型构建
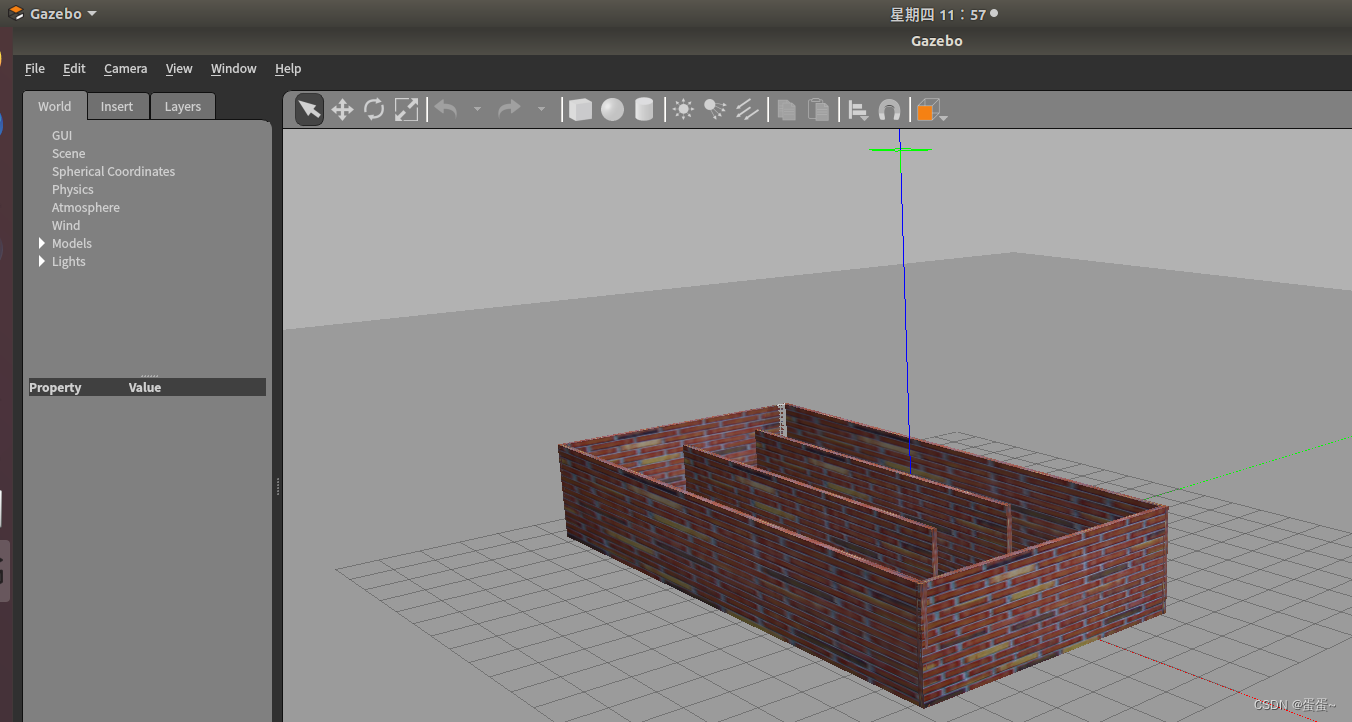
可以看到刚才画好的模型
点击file保存至工作空间下的worlds文件夹下,注意后缀一定是.world
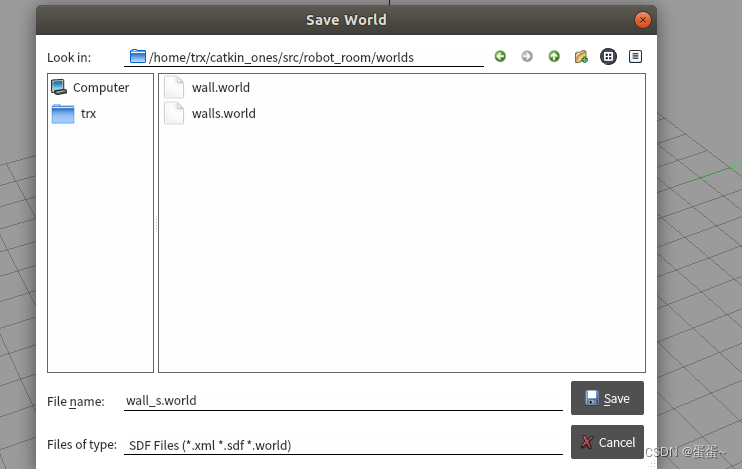
保存好之后就可以关闭gazebo了
然后我们在同工作空间下建立world.launch文件
~/catkin_ones/src/robot_room/launch$ touch world.launch
输入以下代码
<launch>
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(find robot_room)/worlds/wall_s.world"/>
</include>
</launch>
回到工作空间的路径下,注册环境变量
~/catkin_ones$ source devel/setup.bash
使用roslaunch 执行我们刚才编写的launch文件
~/catkin_ones$ roslaunch robot_room world.launch
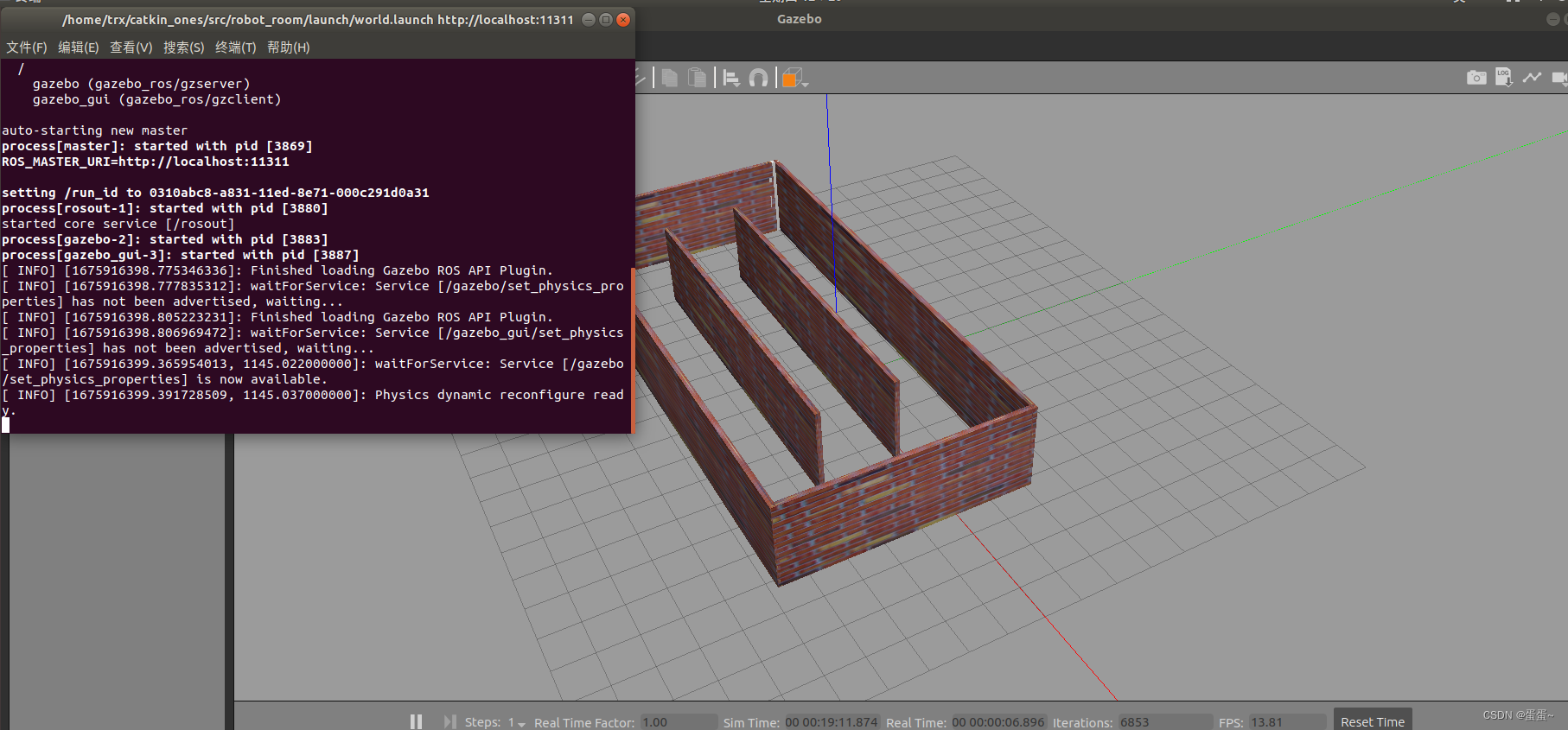
这样就打开了我们刚才创建的world














 340
340











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









