







这次任务中有很多都很懵,后面搞明白了再来修改,也希望大佬们能够指点一二。
任务要求
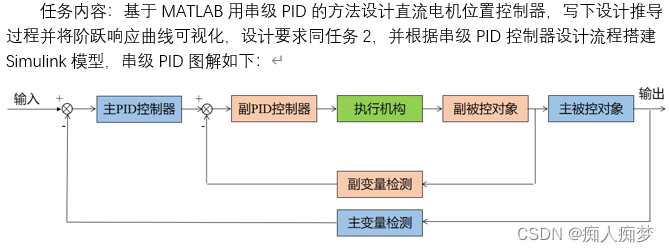
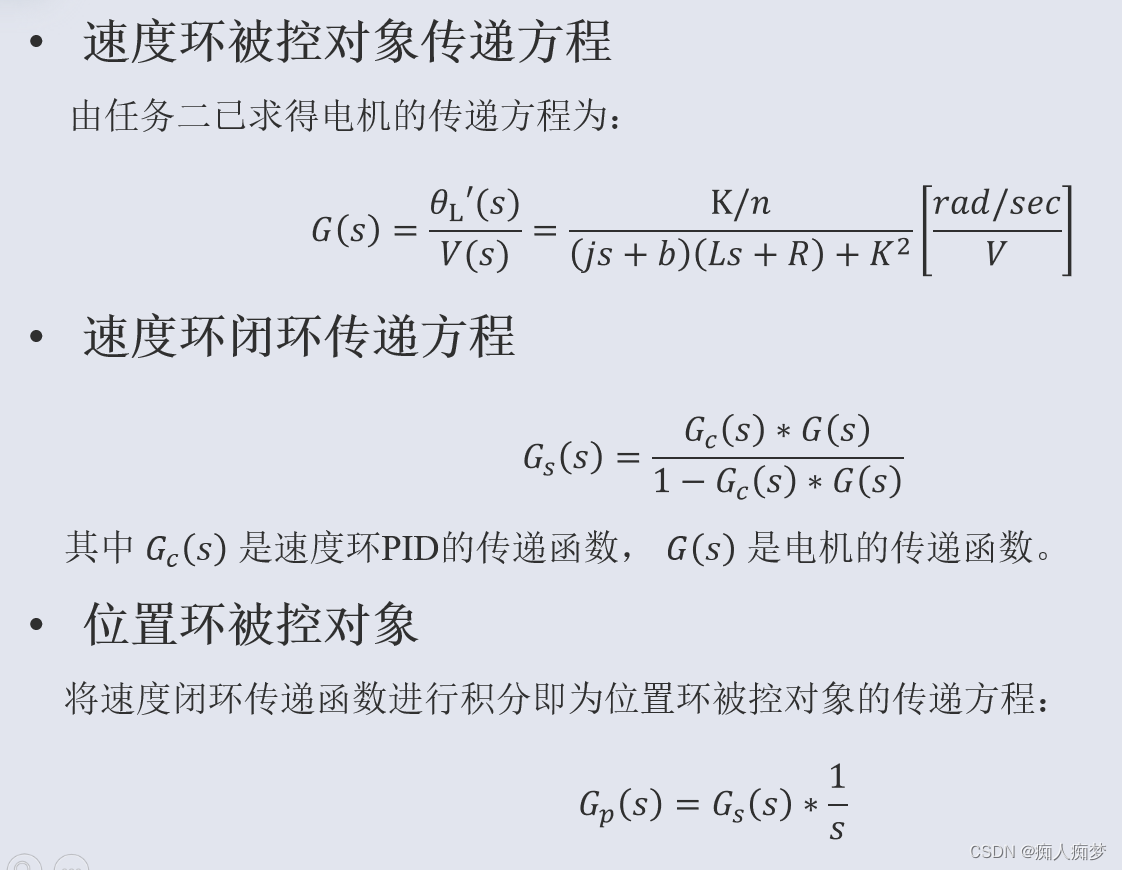
传递方程的建立
直流减速电机速度控制器的传递方程已在上一篇中讲解过:
PID控制器设计实现减速直流电机速度控制(MATLAB)_痴人痴梦的博客-CSDN博客
得到电机速度环的传递方程为:
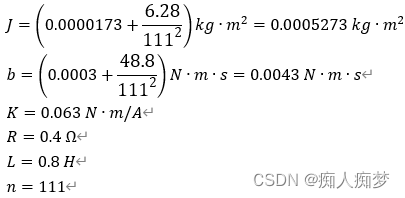
其中
这里我也不确定是不是这样做,先暂时这样做吧。
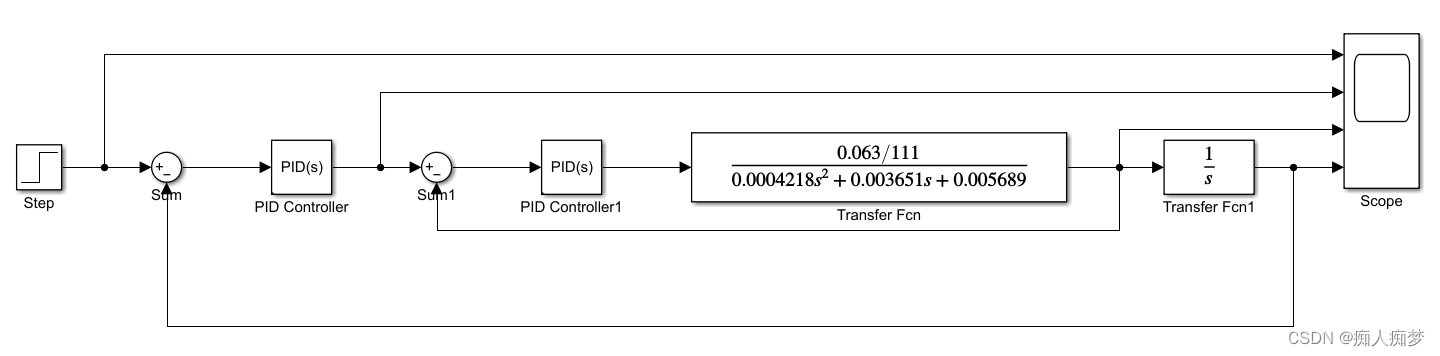
Simulink建模
这次任务中有很多都很懵,后面搞明白了再来修改,也希望大佬们能够指点一二。
直流减速电机速度控制器的传递方程已在上一篇中讲解过:
PID控制器设计实现减速直流电机速度控制(MATLAB)_痴人痴梦的博客-CSDN博客
得到电机速度环的传递方程为:
其中
这里我也不确定是不是这样做,先暂时这样做吧。
 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























