







大家好,我是带我去滑雪!
自从计算机进入控制领域以来,用数字计算机代替模拟计算机调节器组成的计算机控制系统,不仅可以用软件实现PID控制算法,而且可以利用计算机的逻辑功能,使PID控制变得更加灵活。数字PID控制在生产过程中是一种最普遍采用的控制方法,在机电、冶金、机械、工业等领域中获得了广泛应用。PID控制器:将偏差的比例(P)、积分(I)和微分(D)通过线性组合构成控制量,对被控制对象进行控制。
简单来说,PID控制器各校正环境的作用为:
- 比例环节:成比例地反映控制系统的偏差信号,如果系统出现偏差,控制器可以立即产生控制作用,并减少偏差;
- 积分环节:主要消除静差(静态误差就是误差不随时间而变化的误差,与其相对的是动态误差,也即误差随时间而变化的误差。),提高系统的误差度。积分作用的强弱取决于积分时间常数,积分常数越大,积分作用越强。
- 微分环节:反映偏差信号的变化趋势,并能在偏差信号变得太大之前,在系统中引入一个有效早期修正信号,从而加快系统的动作速度,并减少调节时间。
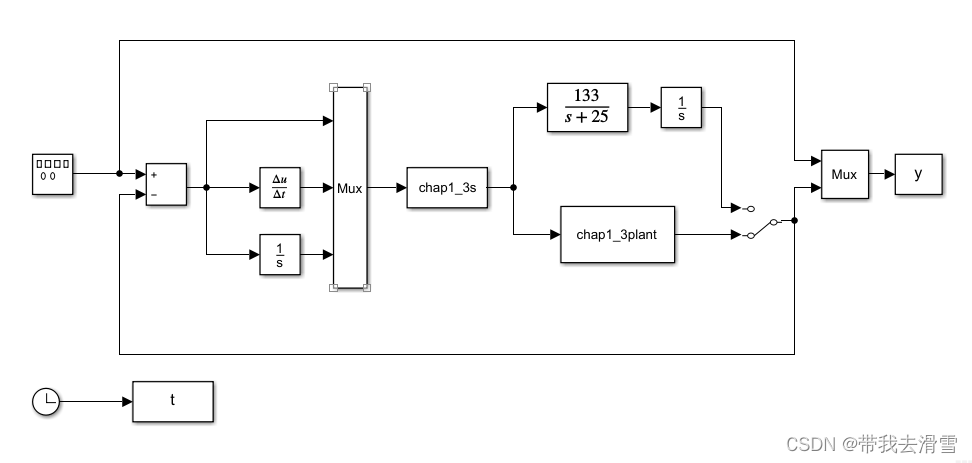
下面进行仿真实战,以二阶线性传递函数为被控制对象,进行模拟PID控制,其中b在103~163之间随机变化,a在15~35之间随机变化。仿真时取kp=60,ki=1,kd=3,采用ODE45迭代方法,仿真时间为10s。
目录
(1)Simulink仿真
(2)S函数PID控制器代码
%S-function for continuous state equation
function [sys,x0,str,ts]=s_function(t,x,u,flag)
switch flag,
%Initialization
case 0,
[sys,x0,str,ts]=mdlInitializeSizes;
%Outputs
case 3,
sys=mdlOutputs(t,x,u);
%Unhandled flags
case {2, 4, 9 }
sys = [];
%Unexpected flags
otherwise
error(['Unhandled flag = ',num2str(flag)]);
end
%mdlInitializeSizes
function [sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 1;
sizes.NumInputs = 3;
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 0;
sys=simsizes(sizes);
x0=[];
str=[];
ts=[];
function sys=mdlOutputs(t,x,u)
error=u(1);
derror=u(2);
errori=u(3);kp=60;
ki=1;
kd=3;
ut=kp*error+kd*derror+ki*errori;
sys(1)=ut;
(3)S函数被控制对象代码
%S-function for continuous state equation
function [sys,x0,str,ts]=s_function(t,x,u,flag)switch flag,
%Initialization
case 0,
[sys,x0,str,ts]=mdlInitializeSizes;
case 1,
sys=mdlDerivatives(t,x,u);
%Outputs
case 3,
sys=mdlOutputs(t,x,u);
%Unhandled flags
case {2, 4, 9 }
sys = [];
%Unexpected flags
otherwise
error(['Unhandled flag = ',num2str(flag)]);
end%mdlInitializeSizes
function [sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 2;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 1;
sizes.NumInputs = 1;
sizes.DirFeedthrough = 0;
sizes.NumSampleTimes = 0;sys=simsizes(sizes);
x0=[0,0];
str=[];
ts=[];function sys=mdlDerivatives(t,x,u)
sys(1)=x(2);
%sys(2)=-(25+5*sin(t))*x(2)+(133+10*sin(t))*u;
sys(2)=-(25+10*rands(1))*x(2)+(133+30*rands(1))*u;function sys=mdlOutputs(t,x,u)
sys(1)=x(1);
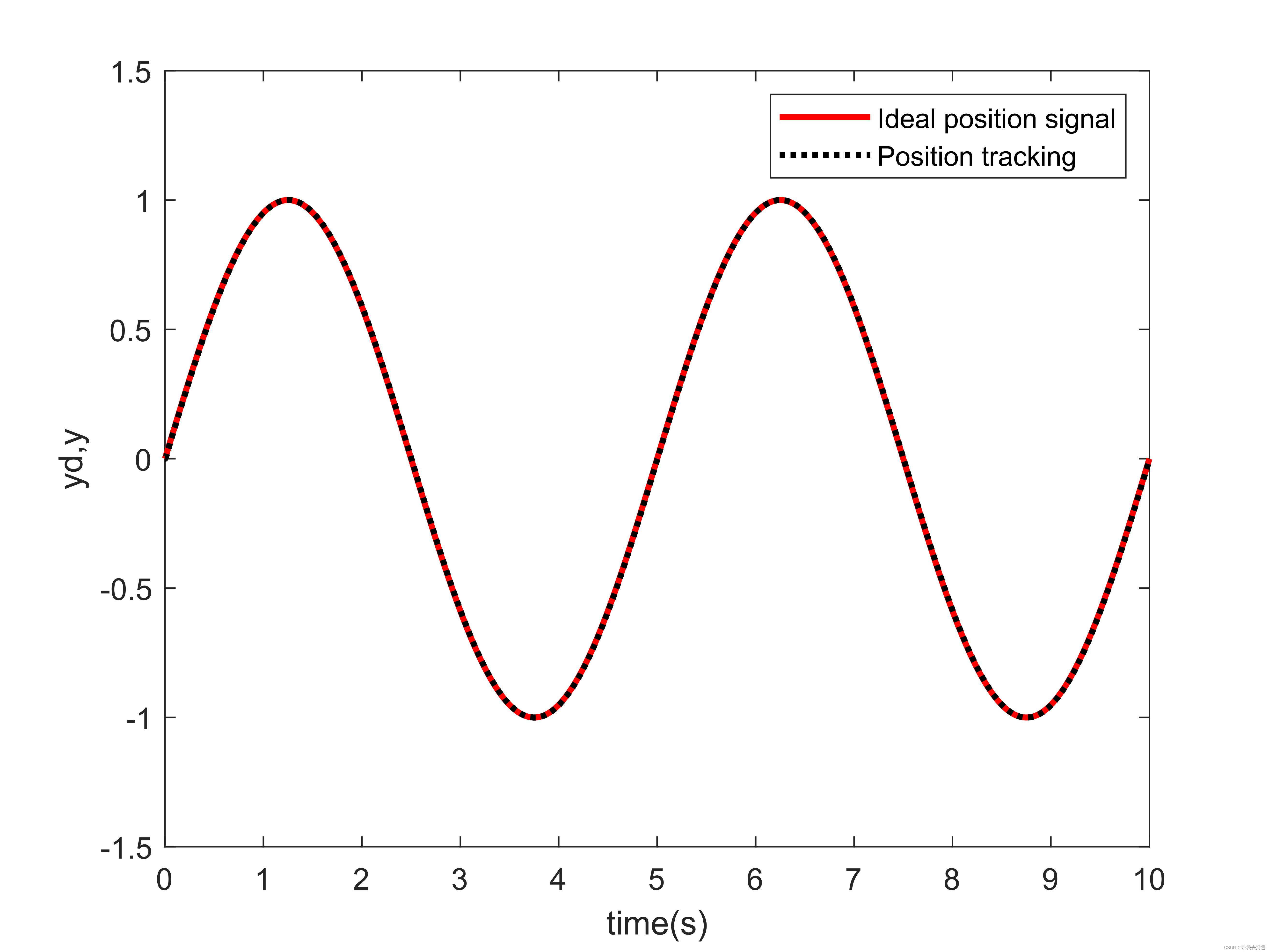
(4)绘制理想轨迹与实际轨迹对比图
close all;
plot(t,y(:,1),'r',t,y(:,2),'k:','linewidth',2);
xlabel('time(s)');ylabel('yd,y');
legend('Ideal position signal','Position tracking');输出结果:
更多优质内容持续发布中,请移步主页查看。
若有问题可邮箱联系:1736732074@qq.com
博主的WeChat:TCB1736732074
点赞+关注,下次不迷路!

















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











