






 文章介绍了舵机的基本原理和构造,包括直流电机、驱动板、减速齿轮和电位器的作用。作者分享了如何利用二阶滤波器将PWM波转换为模拟量,并通过PID理论实现闭环控制。文中还探讨了如何利用运放进行电压比较和反馈,以及解决可能的震荡问题。最后,作者提到了自制舵机的娱乐性和实际应用价值。
文章介绍了舵机的基本原理和构造,包括直流电机、驱动板、减速齿轮和电位器的作用。作者分享了如何利用二阶滤波器将PWM波转换为模拟量,并通过PID理论实现闭环控制。文中还探讨了如何利用运放进行电压比较和反馈,以及解决可能的震荡问题。最后,作者提到了自制舵机的娱乐性和实际应用价值。
舵机是啥,就……应该不需要我从盘古开天辟地来讲了吧(笑)。
一般来说,就是给一个(一系列)pwm波,就可以转一个角度,最常见的就是咱们用的小蓝舵机(sg90)。小小的很卡哇伊,虽然只能做玩具一类的产品。

要是拆开来看的的话,舵机里面分为四个部分:直流电机,驱动板,减速齿轮,电位器。
其实学过自控的人,或者接触过pid理论知识的不难猜到,这几个部件的作用,精髓就在这个电位器上面,电位器这个原件能够提供反馈,也就是把开环控制升级到了闭环控制(就是所谓的硬件pid,人类科技进步的一大步,虽然一般的模拟舵机里面的电路大多是pi控制)。
所以,我们可以根据这个原理来自己设计一个模拟舵机
(简单提一嘴,我之所以要自己设计一个舵机的原因很简单,有个比赛项目需要一个直线伺服电机,需要很小而且形状也不是主流的舵机形状,某宝上的符合要求的舵机40块钱一个,家贫无钱钱以购置,且学校不报销,是故就打算自己手搓一个,结果,原理搞定了,快递不给力,一直没发货,误了时间,就不了了之了/摊手~)。
以下就是我设计的舵机驱动原理图(纯新手,纯小白,如果有啥错误,请轻喷orz,谢谢谢谢)。
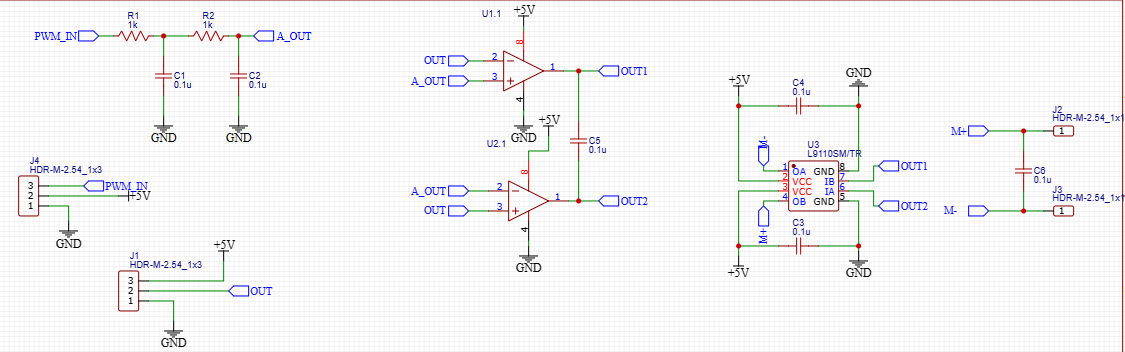
大体上就是这个样子了~,上面的参数不具任何参考意义,具体参数请各位自己调试吧~(毕竟是娱乐向的)
接下来讲一下原理,通俗来讲二阶滤波器之所以可以将pwm波转换为一个模拟量,原因很简单,有句话就是“任何周期波都可以傅里叶展开”(傅里叶展开就和羊胎素效果差不多doge)所以展开就对了,这只是一个信号,有电压就够了,不需要啥驱动能力,所以就……开展!
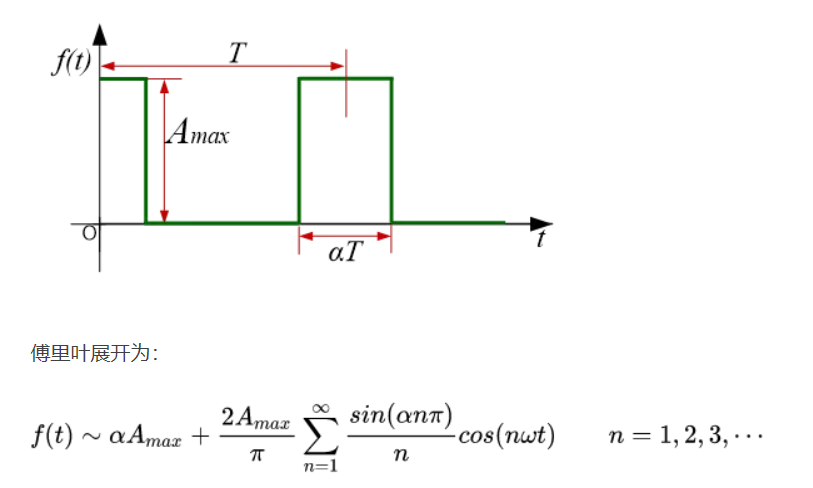
图中的 Amax就是我们要求的模拟量(后面称为标准电压),通过二阶滤波,把后面的谐波直接滤走留下来的就是我们想要的模拟量(用高中的知识类比一下,有点像周期电压的等效电压)
Amax就是我们要求的模拟量(后面称为标准电压),通过二阶滤波,把后面的谐波直接滤走留下来的就是我们想要的模拟量(用高中的知识类比一下,有点像周期电压的等效电压)
然后就是精髓部分,反馈!
这里我用运放充当电压比较器,来比较判断处理后的pwm的模拟量电压和电位器电压(后面称为反馈电压)的大小关系,用两个运放而且反馈电压和标准电压的输入二者相反,这样的话就可以输出一对互补的信号,从而来驱动后续的H桥电路,进而来控制电机正转还是反转。
简单概括一下工作原理就是:给一个输入的标准电压,然后电路开始用这个标准电压和与电机相连的电位器反馈回来的电压比较,然后输入大于反馈的话就会控制电机正转(假设电机正转时,会带动电位器的输出回去的反馈电压升高),反之就会反转。
然而这时候就会有一个小问题,如果标准的电压和反馈电压差不多的时候,会发生什么?答案是会舵机会震荡,如果电机的死区电压比较大的话,可以忽略这个震荡,但是如果电机的死区电压较小的时候,震荡就会很明显,此时在两个比较输出的地方加一个电容(所谓的积分环节)就可以有效地避免震荡情况
具体的定量计算就暂时不算了,比较只是个娱乐向的帖子,看个乐就好了,虽然是娱乐向,但还是能帮大家简单了解一下自动控制原理的实际应用,不是拘泥于书上第一章的内容。
具体的实物硬件电路,其实在学校有搭过一个胎盘版本的,能正常工作,但是忘了录视频了(/无奈)只能这样挂个原理图,所以只能简单讲一下原理,逗大家一乐尔尔。
另外祝大家新年快乐!兔年吉祥~万事大吉~虎年完结撒花~

(另外,卑微求赞QAQ,不胜感激Orz)。

















 950
950

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









