






1.运行前提醒
首先非常非常非常感谢作者Xiaolei Lang的帮助,不仅为我们提供了优秀的开源程序,还帮助笔者解决了程序运行中的困难,小弟抱拳了
首先,最最最重要的一点,就是安装的库文件版本一定要与作者给的版本一致,不然后续可能会出现一些不必要的麻烦。比如笔者遇到过一个问题,就是ceres版本装的太高了,导致某个头文件被合并到其他头文件里,最后报错,所以笔者建议最好库文件版本要和作者的一致。
2.操作步骤
操作步骤如下(抄作者的):
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
git clone https://github.com/Livox-SDK/livox_ros_driver.git
cd ~/catkin_ws && catkin_make
cd ~/catkin_ws/src
git clone https://github.com/APRIL-ZJU/Coco-LIC.git
cd ~/catkin_ws && catkin_make
source ~/catkin_ws/devel/setup.bash #这一步可以换一下,详情见下
cd ~/catkin_ws/src/Coco-LIC && mkdir datasource ~/catkin_ws/devel/setup.bashrc这一步建议可以换成这个方案,就不用每次都要source一遍。
如果你严格按照上面步骤执行,那大概率是不会出错的,如果有错肯定不是大错,csdn即可解决问题。
3.遇到及解决问题
3.1文件夹路径问题
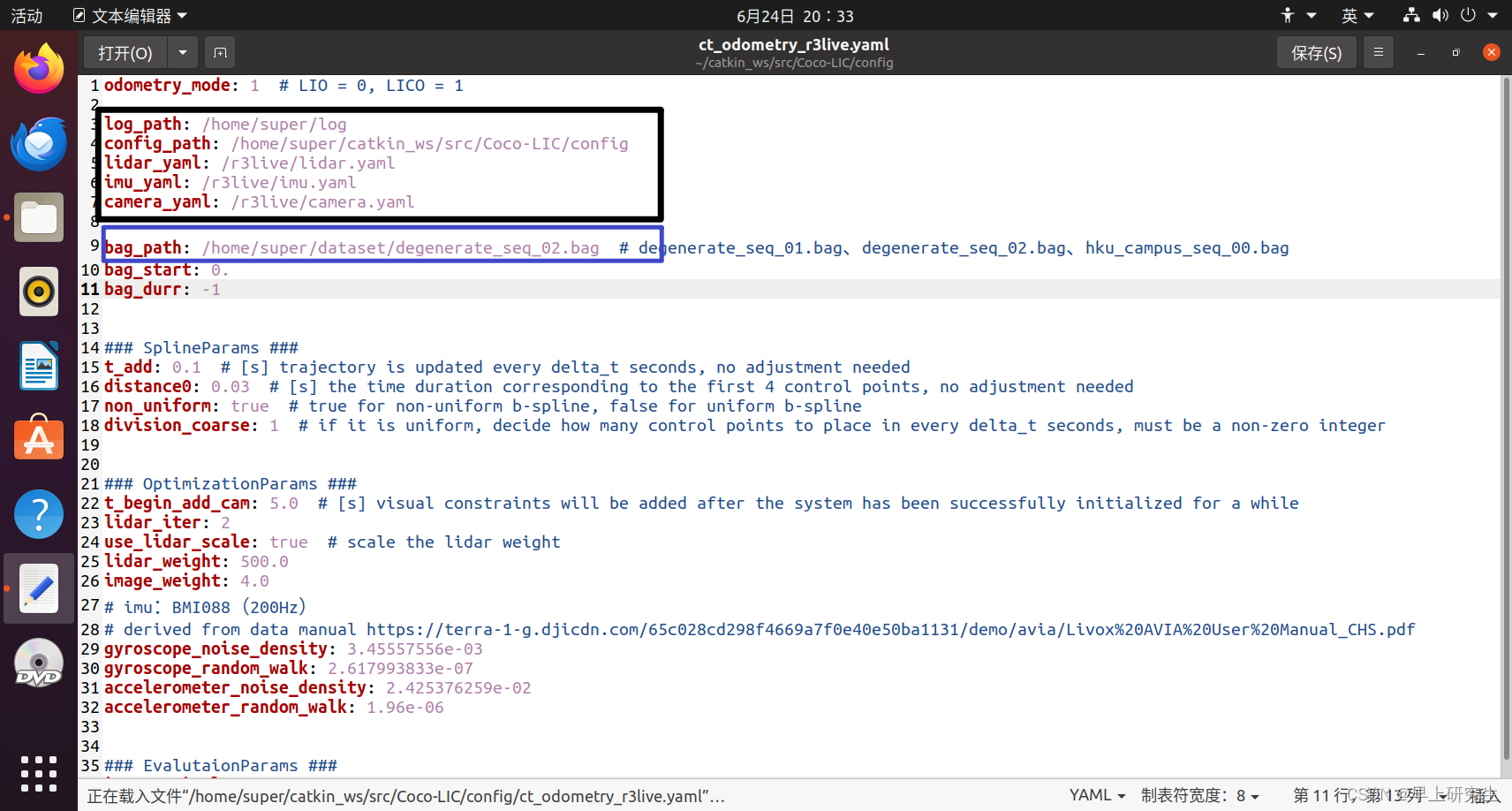
首先就是作者提醒过的文件路径问题,主要是要修改这个文件(config/ct_odometry_xxx.yaml)中的各个文件路径,如下图片中黑框部分。细心的网友发现了还有一个紫色的框框,那就是数据集路径,把数据集文件名改成你自己下载的数据集文件即可,数据集下载链接:R3LIVE dataset(笔者举了一个例子,原作者给了4个不同类型的数据集,感兴趣的读者可以自行查看)
如果你还是不知道怎么改,就把super改成你自己ubuntu的用户名并且数据集名字改成你自己下载的数据集名字,其他的可以不用动,因为按照上面的步骤,你的catkin_ws就在主目录下。这样这一步文件路径就算是成功了。
会不会有人问:啊?我主目录下没有log文件啊,按照这个路径不会报错吧(笔者已经试过了,会报错)。
笔者答:没有这个文件夹就在主目录下创建一个log文件夹(笔者提醒,总共需要创建三个文件夹,这是第一个)
同理,因为最后的轨迹文件会保存在./src/Coco-LIC/data这个路径下,但是呢,这个路径中没有data文件夹,所以呀,在Coco-LIC中创建一个data文件夹即可(创建的第二个文件夹)
第三个文件夹需要创建在主目录下,命名为dataset,用来存储数据集文件,例如本文用的是degenerate_seq_02.bag
到了这里,文件路径问题就算是解决了
3.2笔者遇到的困难
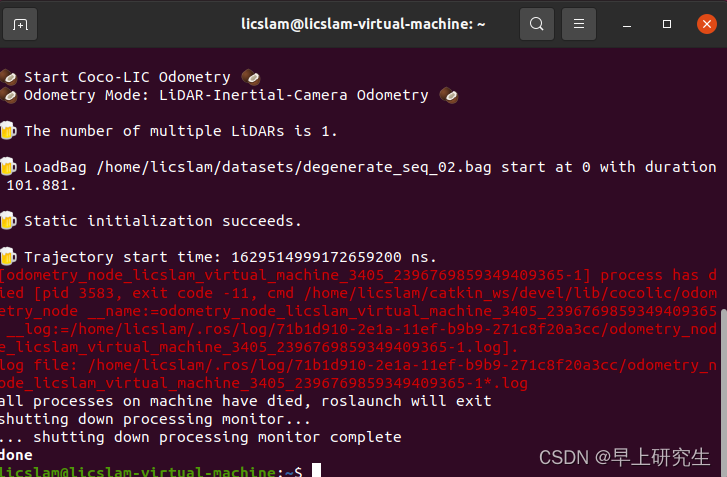
就当笔者满心欢喜,打开roscore,运行roslaunch cocolic odometry.launch config_path:=config/ct_odometry_r3live.yaml的时候,遇到了一个问题,大概就是下面这样,笔者和同门想了很多办法,包括使用gbd测试查找原因、换用服务器运行等等。。。。。结果仍不行。
就在我们一筹莫展的时候,笔者想到了联系原论文的作者,这也是没有办法的办法。本来就没对作者能回信抱有期望,想着下次组会向老师说明原因,但。。但。。转机出现了。
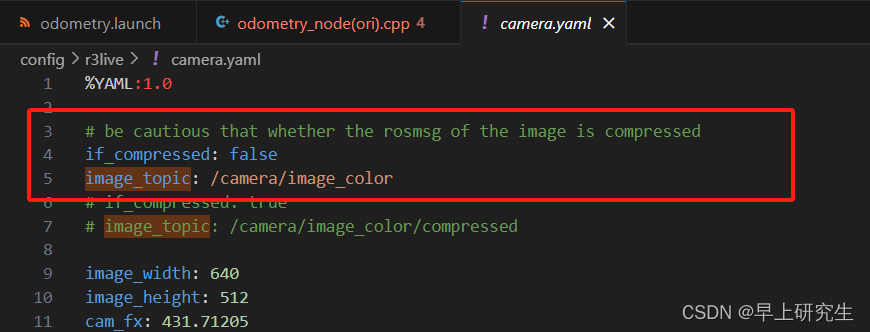
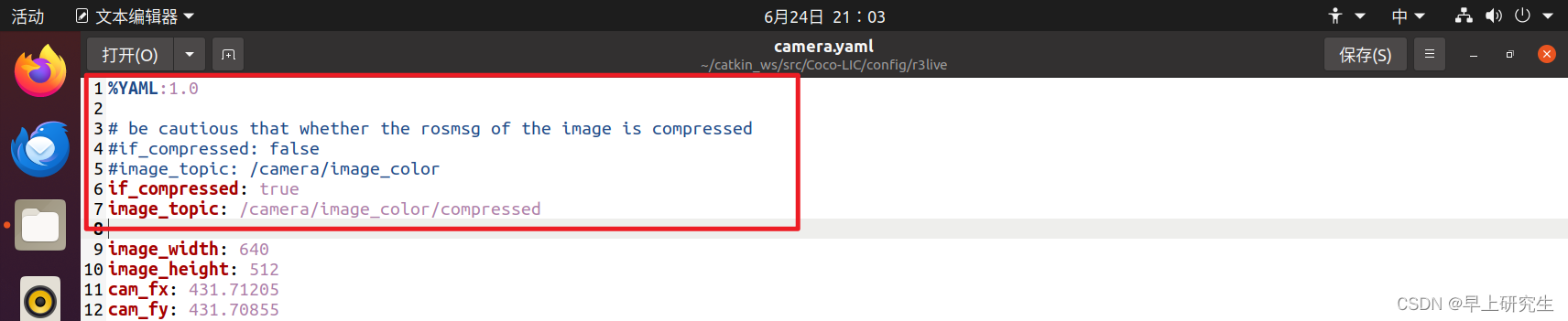
笔者向同门报告了好消息,在同门的不懈努力下,终于找出了原因。是camera.yaml文件我们没弄好,在修改过后,运行成功!!(非常非常非常感谢同门,也非常非常非常感谢作者Xiaolei Lang的帮助)抱拳
4.运行程序及结果展示
首先打开一个终端,输入roscore,如下图:
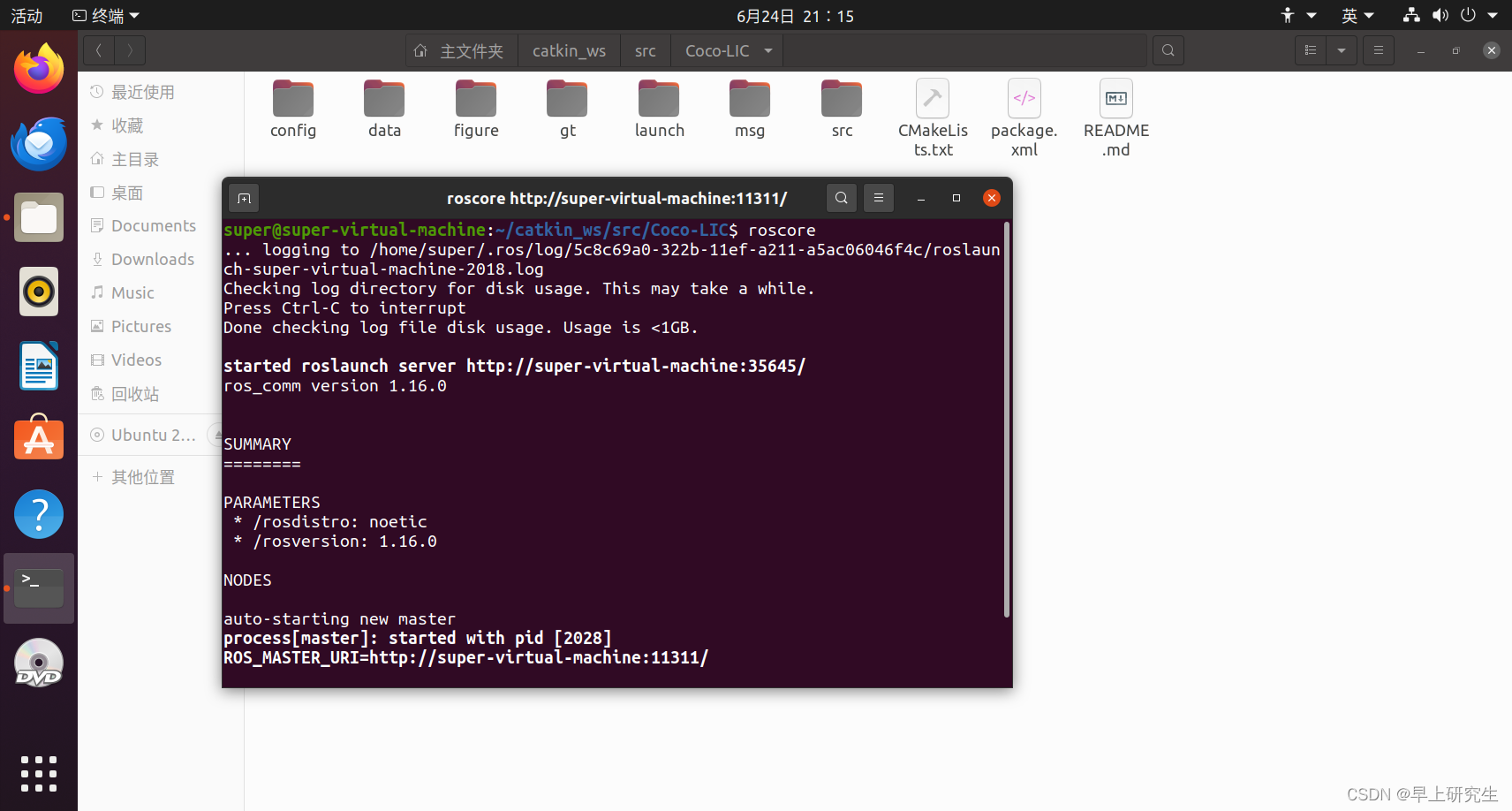
然后在打开一个终端,输入以下代码,结果见下图,对,没错,你成功了!!!
roslaunch cocolic odometry.launch config_path:=config/ct_odometry_r3live.yaml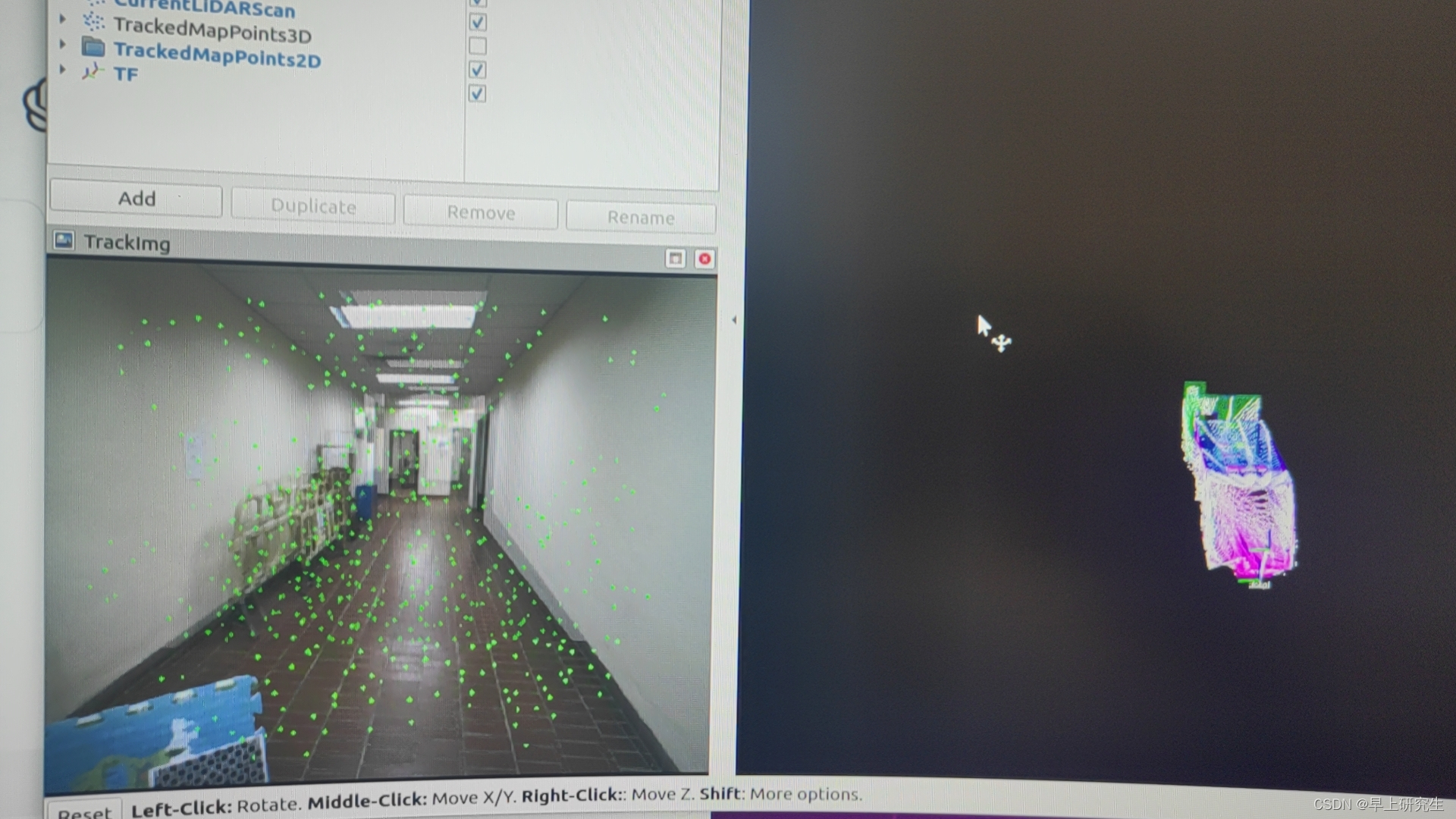















 2786
2786











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









