







目录
一、源码及数据集下载
源码:https://github.com/TixiaoShan/LIO-SAM
GTSAM源码包:https://github.com/borglab/gtsam/releases/
Walking dataset:https://pan.baidu.com/s/1zbsYjkrhRaQ-feXRfuP9Yg
提取码:zsk7
Park dataset:https://pan.baidu.com/s/1umjQ27ekUcSDTvK15Rhaeg
提取码:bswp
二、安装依赖
2.1 boost >= 1.65
跨平台的免费的C++开源库,它使得C++编程更高产。
sudo apt-get install libboost-all-dev
2.2安装 tbb
是Intel针对基于多核处理器进行软件开发而创建的一套C++模板库,核心作用是用来在任务处理中做多线程加速。
sudo apt-get install libtbb-dev
2.3 CMake >= 3.0
cmake -version
sudo apt-get install cmake
2.4 gcc >=4.7.3
gcc -v
2.5 安装mkl
Intel MKL 性能库具有很高的运行效率,对数据集的运算,结合了intel自身处理器的特点进行了优化。
sudo bash
cd /tmp
wget https://apt.repos.intel.com/intel-gpg-keys/GPG-PUB-KEY-INTEL-SW-PRODUCTS-2019.PUB
apt-key add GPG-PUB-KEY-INTEL-SW-PRODUCTS-2019.PUB
rm GPG-PUB-KEY-INTEL-SW-PRODUCTS-2019.PUB
exit
sudo wget https://apt.repos.intel.com/setup/intelproducts.list -O /etc/apt/sources.list.d/intelproducts.list
sudo sh -c 'echo deb https://apt.repos.intel.com/mkl all main > /etc/apt/sources.list.d/intel-mkl.list'
sudo apt-get update
示例版本是:
sudo apt-get install intel-mkl-2018.2-046
我安装了上述老版本后又安装了是2020.4-912:
sudo apt-get install intel-mkl-2020.4-912
2.6 安装ROS功能包
sudo apt-get install -y ros-noetic-navigation
sudo apt-get install -y ros-noetic-robot-localization
sudo apt-get install -y ros-noetic-robot-state-publisher
三、安装GTSAM库
我下载的最新版 4.2a7,没遇到问题。
cd gtsam-4.2.a7 #替换成自己的目录
mkdir build
cd build
cmake ..
make check
sudo make install
包比较大,编译和安装的时间比较久,可以调用多核进行编译。
四、编译并运行LIO-SAM
4.1 创建工作空间
cd ~/liosam_ws/src
catkin_init_workspace
git clone https://github.com/TixiaoShan/LIO-SAM.git
4.2 源码修改
Ubuntu20.04默认安装opencv4,需要修改“LIO-SAM-master/include/utility.h”
#include <opencv/cv.h>
修改为
#include <opencv2/imgproc.hpp>
通性问题,需要修改“LIO-SAM-master/CMakeList.txt”
set(CMAKE_CXX_FLAGS "-std=c++11")
修改为
set(CMAKE_CXX_STANDARD 14)
4.3 运行LIO-SAM
catkin_make
source devel/setup.bash
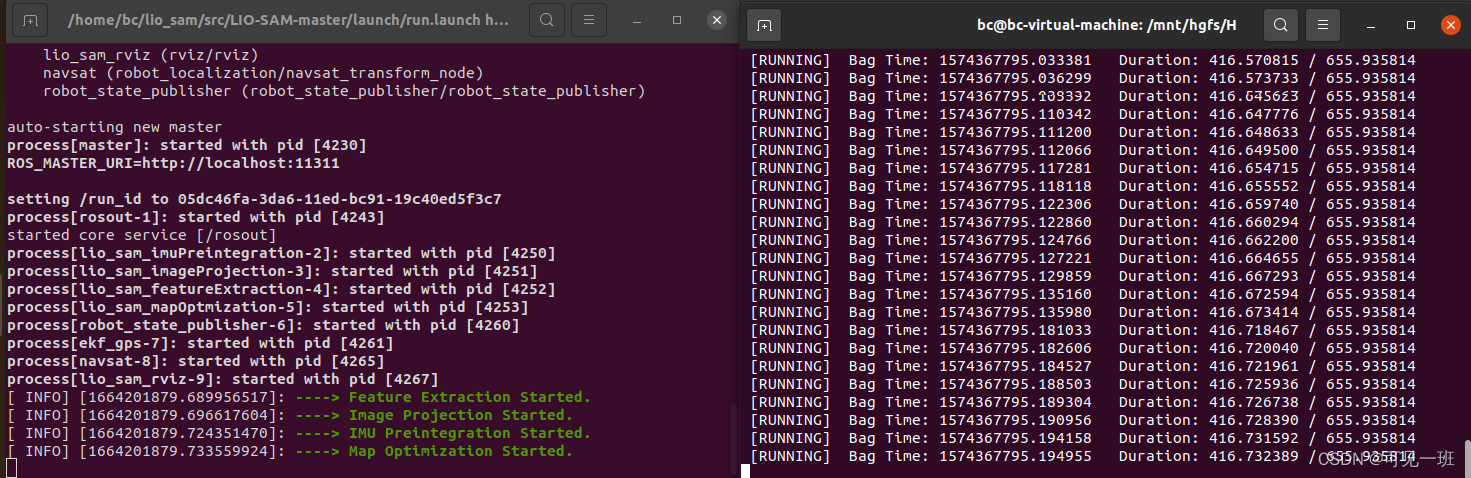
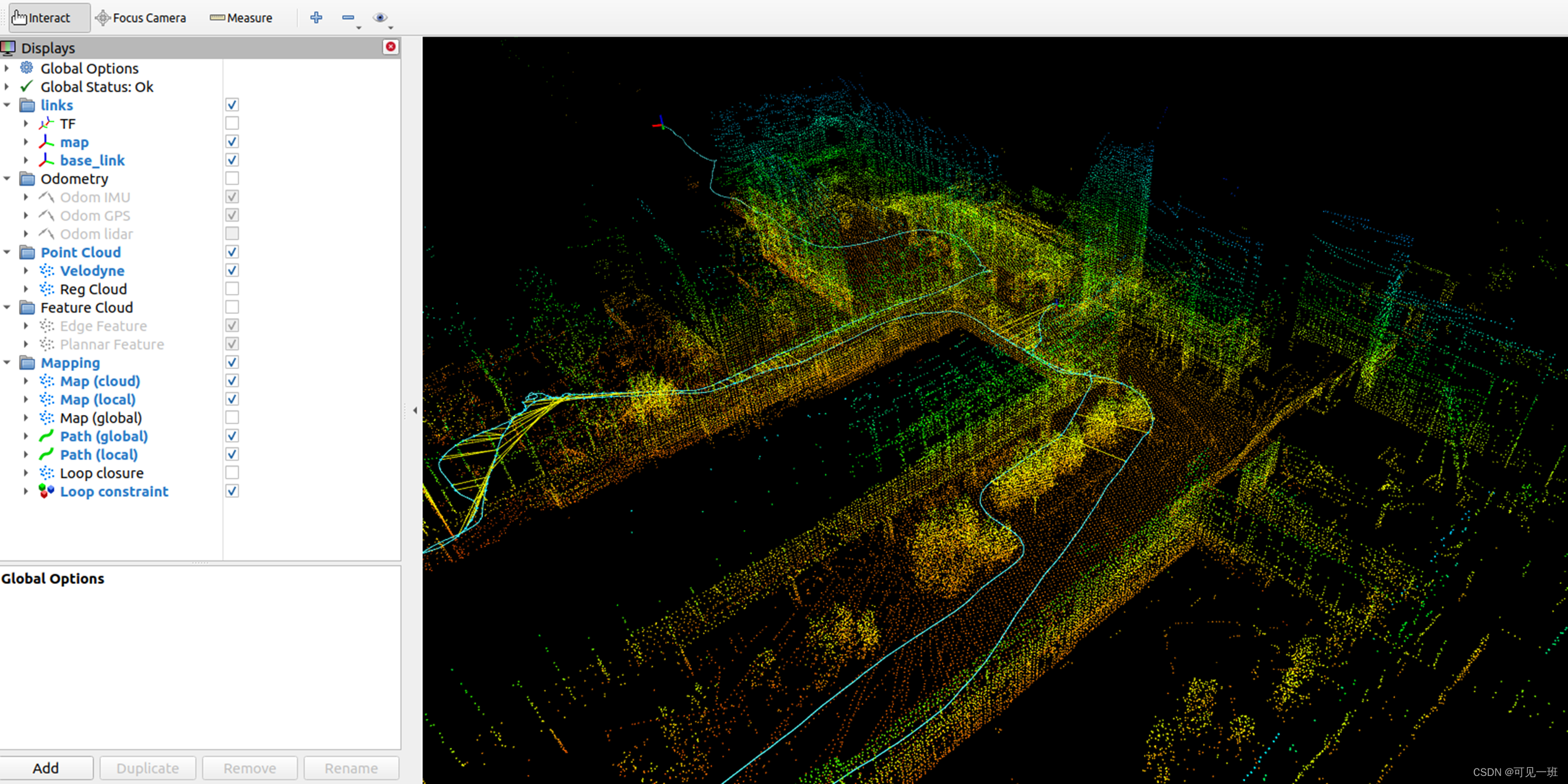
roslaunch lio_sam run.launch
4.4 播放包
rosbag play casual_walk.bag -r 3
如果内存不足,不要倍速播放
rosbag play casual_walk.bag
















 1196
1196











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











