







安装可视化环境,大概就下面几个包
conda install python=3.6.2
pip install pyqt5==5.15.2
pip install mayavi==4.6.0报错
Fatal Python error: _PyInterpreterState_Get(): no current thread state
解决conda install python==3.6
代码
import numpy as np
from mayavi import mlab
if __name__ == '__main__':
bin_file = r'D:\pycharm\project\PTT\data\kitti\training\velodyne\0000\000000.bin'
pointcloud = np.fromfile(bin_file, dtype=np.float32, count=-1).reshape([-1, 4])
x = pointcloud[:, 0] # x position of point
y = pointcloud[:, 1] # y position of point
z = pointcloud[:, 2] # z position of point
r = pointcloud[:, 3] # reflectance value of point
d = np.sqrt(x ** 2 + y ** 2) # Map Distance from sensor
vals = 'height'
if vals == "height":
col = z
else:
col = d
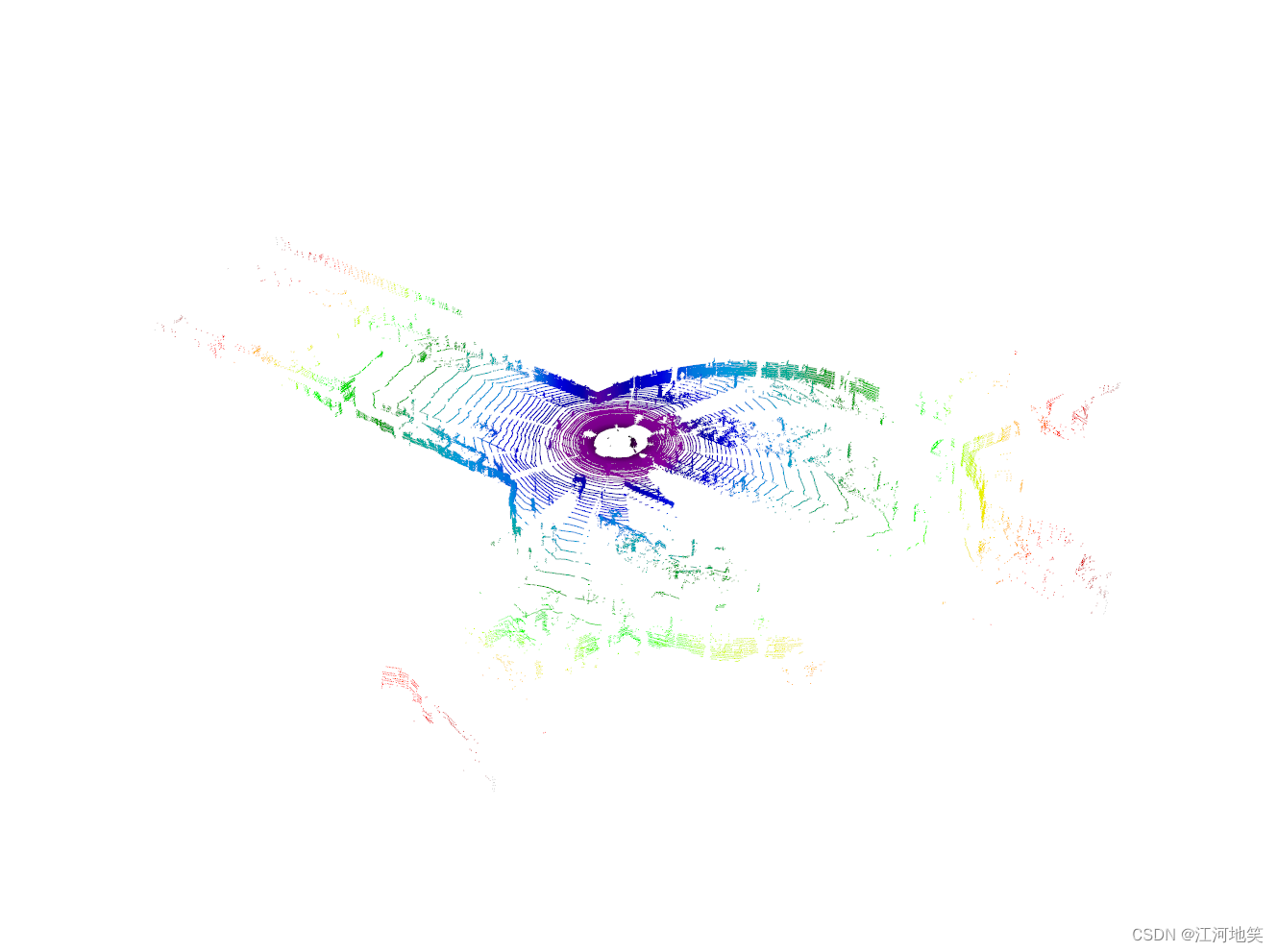
fig = mlab.figure(bgcolor=(1, 1, 1), size=(700, 500))
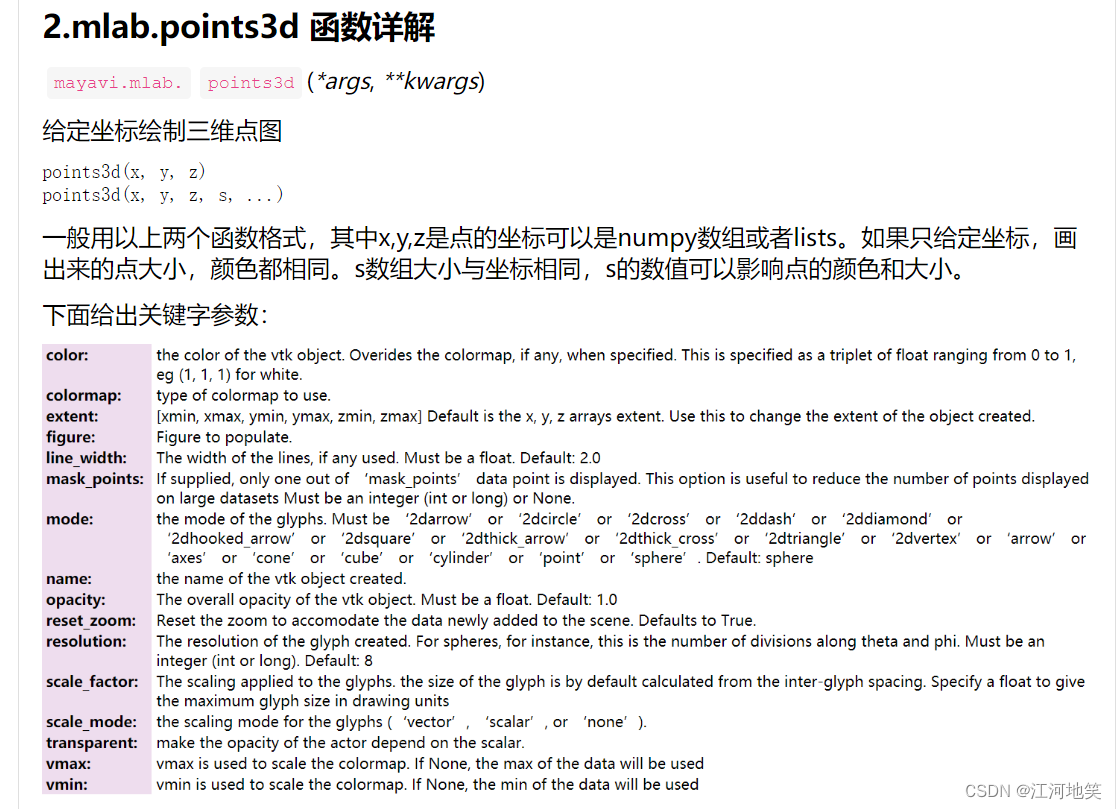
mlab.points3d(x, y, z,
d, # Values used for Color
mode="point",
colormap='spectral', # 'bone', 'copper', 'gnuplot', 'spectral', 'summer'
# color=(0, 1, 0), # Used a fixed (r,g,b) instead
figure=fig)
mlab.show()
















 2120
2120











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











