






@date : 2022.11.12 begin
@author : HNU-Yeehow
1. 课程知识总结
1.1. 课程内容
课程主要包括了三个部分:四旋翼飞行器的建模与控制(Quadrotor Modeling and Control);计算机视觉基础(Computer Vision Basics);多传感器融合策略(Multi-sensor Fusion)。内容涉及到刚体力学Vision Basics) ;多传感器融合策略(Multi-sensor Fusion) 。内容涉及刚体动力学(rigid-body dynamics) ,系统建模(system modeling) ,控制(control) ,轨迹规划(trajectory planning) ,传感器融合(sensor fusion) ,基于视觉的状态估计(vision-based state estimation) 等。
1.2. 课程基础要求
-
Linear algebra
-
Probability
-
MATLAB progamming skills
-
C++ programming skills
-
Linux
-
ROS
1.3. 无人机介绍
使用四旋翼无人机
四旋翼无人机的运动包括旋转和平移
旋转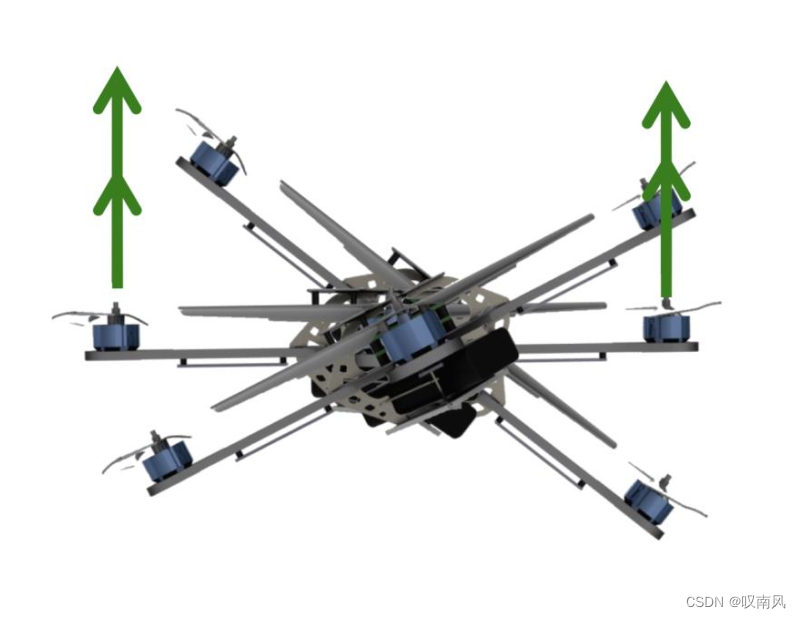
平移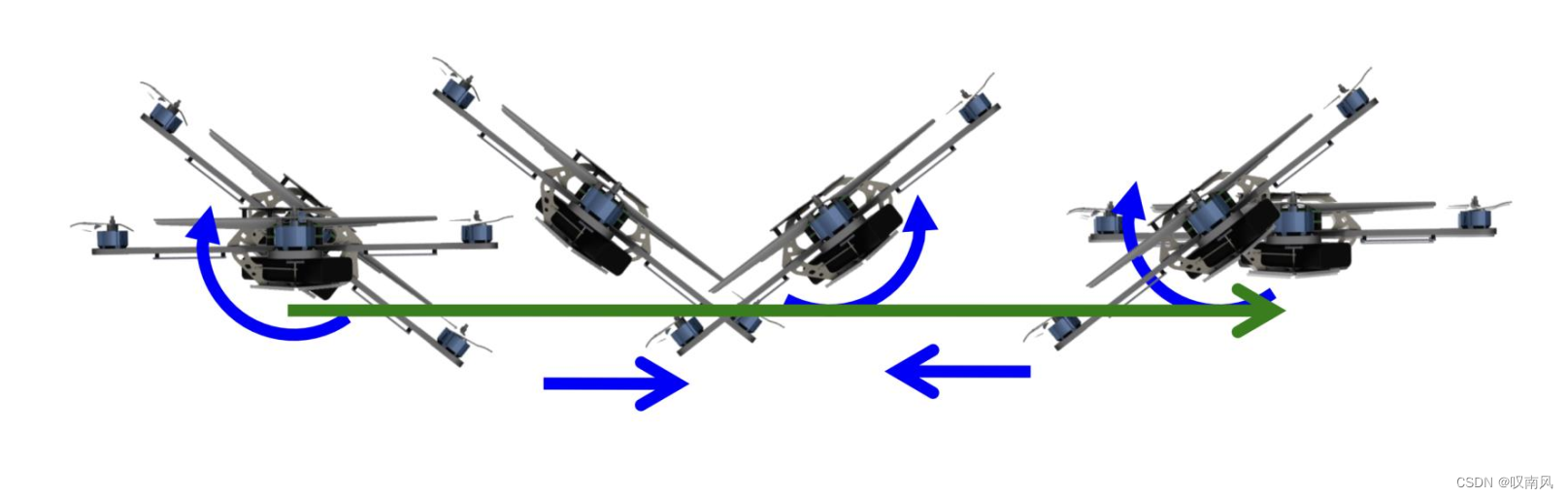
1.4.对于一个自主移动飞行器
包含部分有
| Part | |
|---|---|
| Part1 | 控制器 Control |
| Part2 | 轨迹生成 Trajectory generation |
| Part3 | 路径规划 Path planning |
| Part4 | 传感和感知 sensing and percption |
| Part5 | 状态估计 State estimation |
| Projects | 系统综合 System integration |
动力学建模及控制(Dtnamic & Control)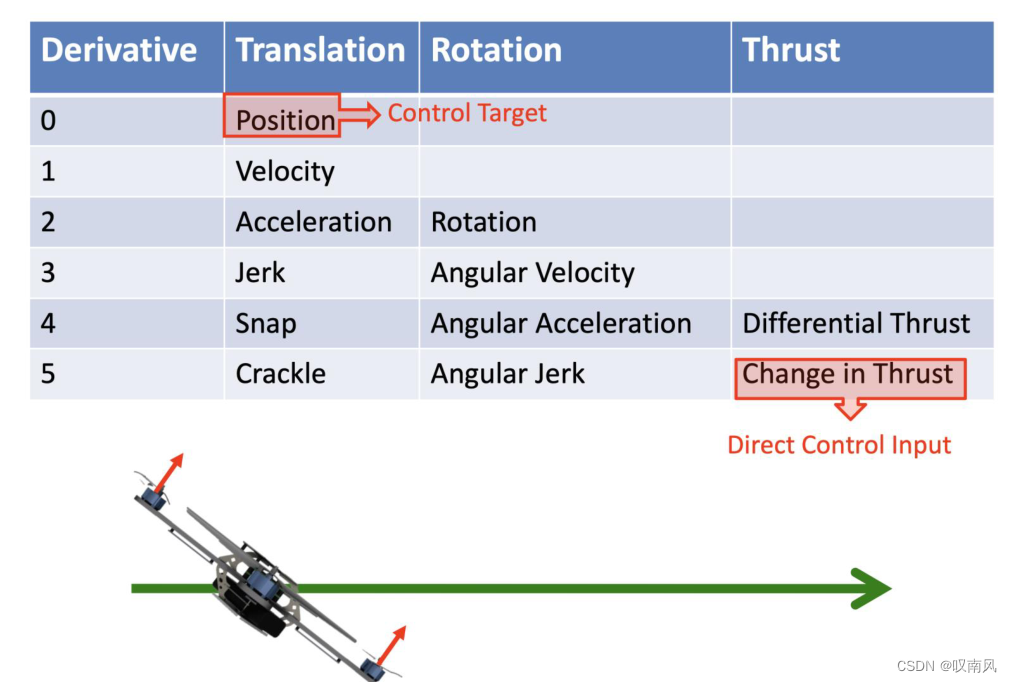
关于变换的0阶微分下的位置position正是我们的控制目标(Control Target),而推力变化(change in Thrust)作为飞行器的直接控制输入来对飞行器进行控制。
传感器和估计(Sensing & Estimation)
-
关键问题:“我”是谁?
-
飞行器的本体传感器:惯性测量单元IMU
-
外界传感器:
—GPS
—磁力计
—气压计
—相机
—...
-
处理/控制器
-
算法支持
导航系统(Navigation)
-
遥控 Remote control
-
惯性导航 IMU
-
基于GPS导航 GPS-based navigation
基于GPS导航
(港科大图)
基于激光导航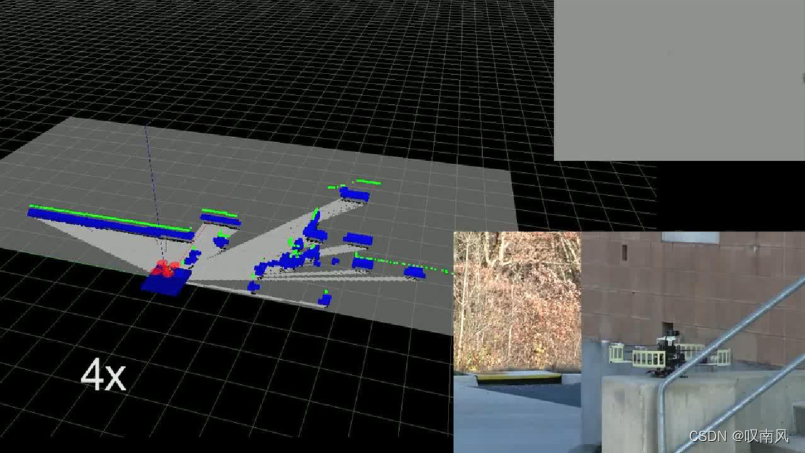
(港科大图)
而本课程所使用的是基于视觉的导航飞行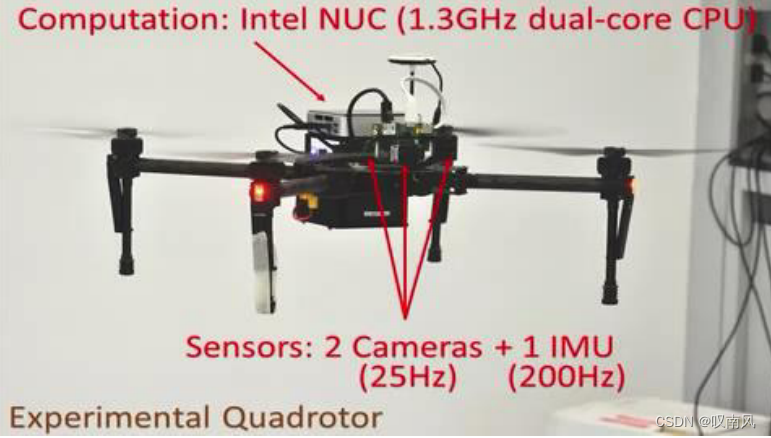
本课程所面临挑战
-
传感和感知
—3D传感和映射
-
状态估计和定位
—低延迟和高精度
-
避障
—复杂且未知
-
轨迹控制
—高机动性
—平滑的轨迹
-
系统集成
—有限制的传感和计算模块
—自主移动
完整系统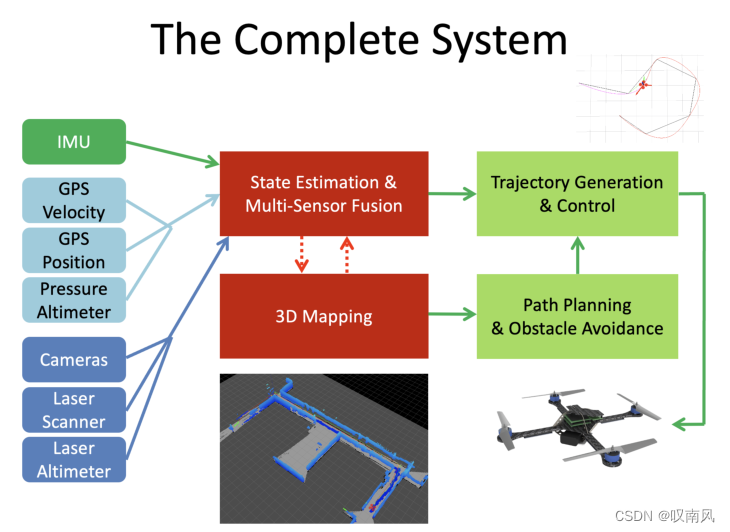















 8317
8317











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









