






bug如图所示: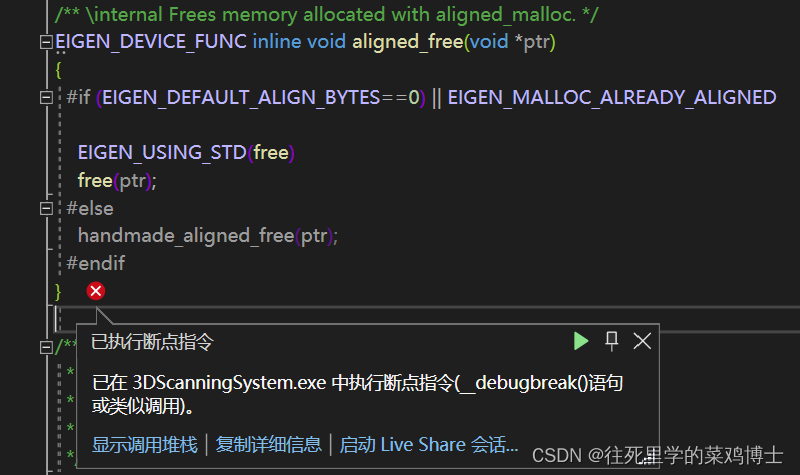
bug由来:
自己搭建了一台单目结构光测量系统,之前一直显示点云都没有问题,但是觉得点云噪声太多了,加了pcl点云滤波算法进来,
pcl::StatisticalOutlierRemoval<pcl::PointXYZRGB> sor;
sor.setInputCloud(cloudPoints);
sor.setMeanK(30); // 设置在计算点的邻域内的点数
sor.setStddevMulThresh(0.3); // 设置标准偏差乘数
sor.filter(*cloudPoints); // 执行滤波
每次都是执行到sor.filter(*cloudPoints)这一句报错,并且是运行一会儿后报错,很奇怪的bug。
我尝试了以下方法:
1.因为对点云算法不熟悉,首先以为是点云类型是RGB类型,滤波器无法兼容RGB类型的点云数据,换成pcl::PointXYZ类型还是报错。
2.弹出的问题是内存问题,以为是输入sor.setInputCloud(cloudPoints);输出sor.filter(*cloudPoints);都是同一个内存地址(均为cloudPoints)导致的,加了 一个输出点云类型cloudPoint_test进来,果然运行sor.filter(*cloudPoint_test)就没有报错了,还没高兴一下,关闭软件的时候又报一模一样的错误。
3.第二步虽然调试没有成功,但是也让我确定了Bug就是点云的指针引起的,因为之前显示点云没有任何问题,然后加入滤波器后开始报错,建立新的点云变量同样也报错,同时定位到Memory.h头文件里面。
4.直接百度搜索错误位置/** \internal Frees memory allocated with aligned_malloc. */内容, 看到了这篇老哥的文章:
PCL中Ptr释放问题 aligned_free_pcl中ptr 类型需要delete_winka9587的博客-CSDN博客
解决方法:
项目属性->C/C++->代码生成->启用增强指令集->高级矢量扩展 (X86/X64) (/arch:AVX)
问题完美解决。
















 1500
1500











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









