







b站搜元界行者:详细教程
闲鱼搜元界行者:详细模型
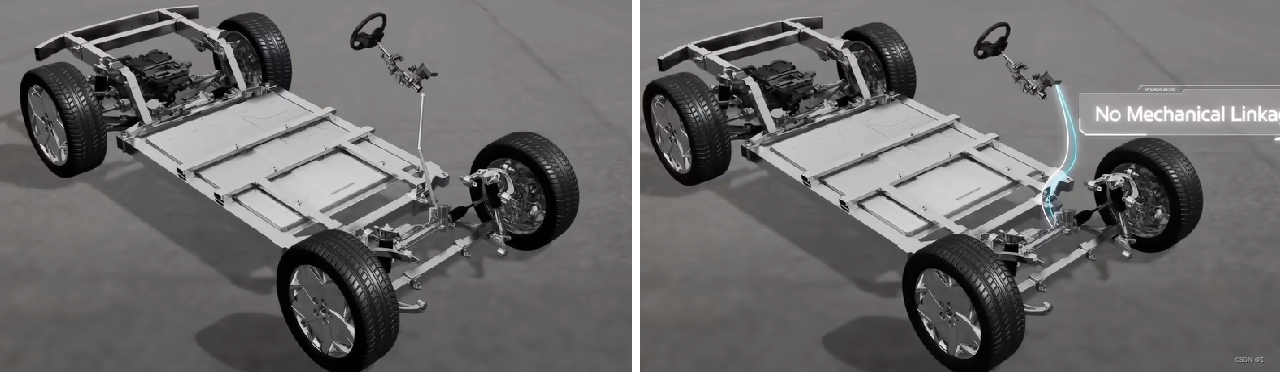
线控转向系统(Steer-By-Wire,简称SBW)是一种先进的车辆转向技术,其特点在于取消了传统的机械传动轴,使方向盘与转向机构之间仅通过电线连接。这种系统完全依赖于电信号来传输控制指令,从而实现了驾驶员与转向机构之间的非直接物理力矩传输。
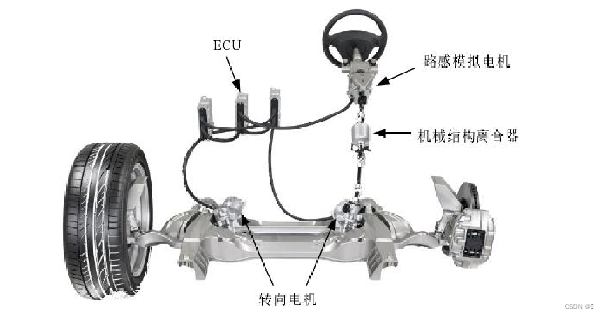
线控转向的执行层是线控转向系统中负责实际执行转向动作的部分。当驾驶员通过方向盘输入转向指令时,执行层会接收到这些指令,并通过电子信号驱动转向执行机构进行相应的动作。这一层的核心任务是根据决策系统发出的总线指令,精确地控制转向幅度,以实现车辆的稳定行驶和精确操控。
路感模拟层则是线控转向系统中的另一个关键部分,它负责模拟传统机械转向系统的路感反馈。路感模拟层通过电子系统模拟生成驾驶员的道路体验,使驾驶员能够感知到车辆的行驶状态和路况。这包括车辆在不同路面条件下的转向阻力、回馈力等信息,这些信息通过方向盘传递给驾驶员,帮助他们更好地理解和适应当前的驾驶环境。
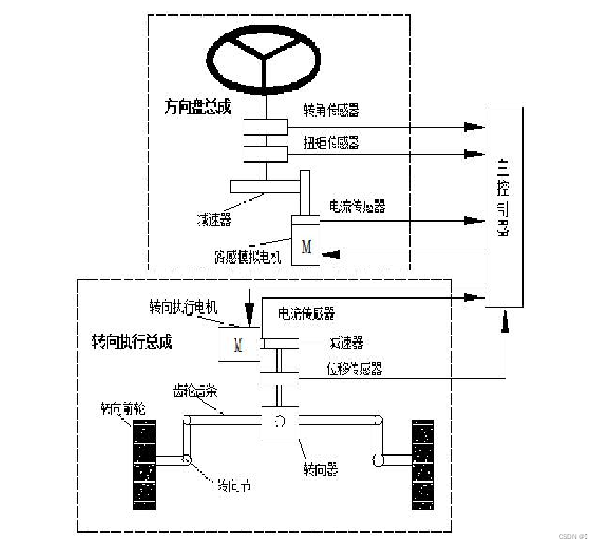
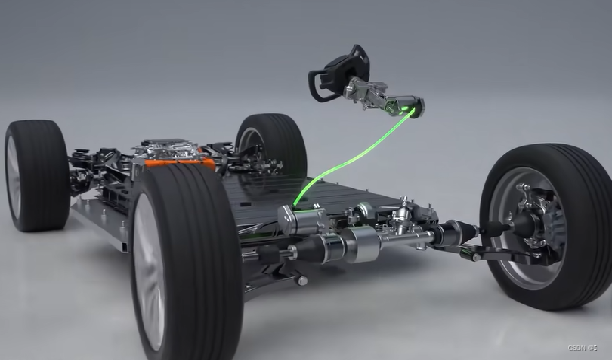
执行层:方向盘转角——转向电机——齿轮齿条——前轮转角
反馈层:综合信息(路面、方向盘转角信息等)——转向电机——驾驶员
何为精确地控制转向幅度? 最为直观的就是设置变角传动比
例如,在低速段,汽车应该具有较大的转向灵敏度,所以转向系统应该具有较小的理想传动比,驾驶员在进行大角度转弯时,只需要转动较小的方向盘转角,在高速段,应当适当降低汽车转向灵敏度,所以转向系统的理想传动比要大,即大的转向盘转角可以产生小的前轮转角,使汽车转向“迟钝”。
如何设置变角传动比? ECU如何控制?
ECU通过接收来自各个传感器的信号(如车速传感器、转向盘转角传感器、横摆角速度传感器等),对车辆的动态状态进行实时分析。 设计:将变角传动比设计成车辆的实际状态(例如横摆角速度、车速以及转向盘转角)的函数。 执行:ECU控制电机实际上是通过控制电流或电压来实现的。当ECU发送指令给转向执行电机时,它会根据指令调整电机的电流或电压,从而产生所需的电磁转矩。这个电磁转矩进而驱动转向机构转动,实现不同的转角,从而形成了不同的传动比。


















 421
421

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









