






一、HC-05蓝牙模块使用
1.1接线
HC-05供电电压为3.6V~6V。通常使用5V供电。其余的RXD接TXD,TXD接RXD,CND接GND即可。
1.2配置模式
HC-05可以使用AT指令进行配置。在配置之前,首先需要让模块进入配置模式。HC-05有一个小按钮。按住小按钮再给蓝牙模块上电,蓝牙模块进入配置模式,此时模块上自带的LED会慢速闪烁。进入配置模式后,就可以用AT指令来配置我们的HC-05了。配置时,用USB转TTL连接HC-05,用串口调试助手发送AT指令进行配置。需要注意的是,HC-05配置模式的波特率固定为38400,如果你给HC-05发送指令,没有收到回复,记得检查一下串口调试助手的波特率是否正确。
AT
检查HC-05模块连接是否正常,HC-05收到后会回复“OK”
AT+NAME=名字
配置HC-05的名字,配置成功后会返回“OK”
AT+NAME?
询问HC-05的名字。发送后会收到“+NAME:“名字””,换行加“OK”
AT+PSWD=密码
配置HC-05密码,配对时需要用到。配置成功后,会收到“OK”
AT+PSWD?
询问HC-05配对密码。发送后会收到“+PSWD:991102”,换行加“OK”
AT+UART=波特率,停止位,校验
设置HC-05的波特率,其中停止位0表示一位停止位,为1表示两位停止位。校验位为0表示无校验,为1表示奇校验,为2表示偶校验。比如设置115200的波特率,一位停止位,无校验。发送“AT+UART=115200,0,0”即可。配置成功后会返回“OK”
AT+UART?
询问HC-05波特率。发送后会收到“+UART:波特率,停止位,校验”,换行加“OK”
配置完成功后,断电重新上电,HC-05按照配置好的名字,配对密码和波特率开始工作。此时LED快闪。
1.3手机端上位机
参考:提高开发效率-蓝牙调试器 - 简书 (jianshu.com)
二、STM32串口配置
注意:串口波特率应该与蓝牙AT模式配置的波特率一致。
HAL库正常配置即可,打开串口中断。
协议:帧头(1Byte)+ data(2Byte)+data字节之和低八位校验(1Byte)+ 帧尾(1Byte
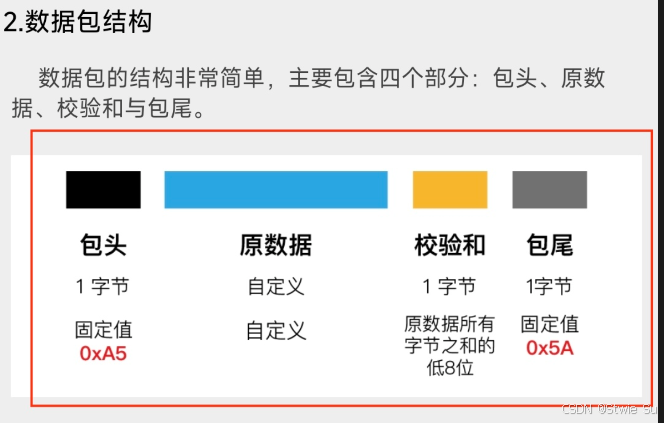
这是由上位机决定的,发送这样的数据给手机,手机才能解析。
main.c全部内容:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2024 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include "string.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
uint8_t rxbuff[5] = {0};
uint8_t txbuff[5] = {0};
uint8_t content[3] = {0};
uint8_t checksum = 0;
uint8_t rx_flag = 0;
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* 校验:取数据之和低八位 */
/*str:数据帧内容 data_length:数据长度 */
uint8_t CheckSum(uint8_t *str, int data_length)
{
int CheckSum_Value = 0;
int i = 0;
for(i = 0; i < data_length; i++)
{
CheckSum_Value += str[i];
}
CheckSum_Value = CheckSum_Value & 0xFF;
return (uint8_t)CheckSum_Value;
}
//截取字符 存在问题
//eg src = hello,world_ substring(src, dest,6, 5)
//表示从下标6的字符w开始,复制5个字符到dest ,即world
void substring(uint8_t *src, uint8_t *dest, int start, int length)
{
if (start < 0 || length <= 0 || start + length > strlen((char*)src))
{
//printf("Invalid parameters!\n");
return;
}
// 使用strncpy函数复制子字符串到目标字符串
strncpy((char*)dest, (char*)src + start, length);
// 在目标字符串的末尾添加空字符,必须吗?
dest[length] = '\0';
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
HAL_UART_Receive_IT(&huart1, rxbuff, sizeof(rxbuff));// 启动异步接收
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if(rx_flag == 1)
{
rx_flag = 0;
HAL_UART_Transmit_IT(&huart1, txbuff, sizeof(txbuff)); //5 Bytes
}
}
}
/* USER CODE END 3 */
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
//只有帧头帧尾或者校验和出问题,会传回FF,否则会传回发送的内容
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance == USART1) //检查是否为USART1串口
{
if(rxbuff[0] == 0xA5 && rxbuff[4] == 0x5A )//检查帧头帧尾
{
//substring(rxbuff,content,1,2);//截取数据帧中的data内容部分
content[0] = rxbuff[1];
content[1] = rxbuff[2];
checksum = CheckSum(content, 2);//计算data内容部分的校验和低八位
if(rxbuff[3] == checksum)//检查校验和通过 rxbuff[3] == 0x01 checksum
{
/******组装tx数据帧*******/
txbuff[0] = 0xA5;
txbuff[4] = 0x5A;
//for(int i = 0;i<2;i++)//数据内容放入txbuff数据帧
//{
// txbuff[i+1] = content[i];
//}
txbuff[1] = rxbuff[1];
txbuff[2] = rxbuff[2];
txbuff[3] = checksum;
/******组装tx数据帧*******/
if(content[0] == 0x01 )
HAL_GPIO_TogglePin(LED_GPIO_Port,LED_Pin);
if(content[1] == 0x02 )
HAL_GPIO_TogglePin(LED_GPIO_Port,LED_Pin);
}
else //校验和检查未通过,全FF
{
txbuff[0] = 0xA5;
txbuff[4] = 0x5A;
txbuff[1] = 0xFF;
txbuff[2] = 0xFF;
txbuff[3] = 0xFF;
}
}
else//帧头帧尾不对,全FF
{
txbuff[0] = 0xA5;
txbuff[4] = 0x5A;
txbuff[1] = 0xFF;
txbuff[2] = 0xFF;
txbuff[3] = 0xFF;
}
// 启动下一次异步接收
rx_flag = 1;
HAL_UART_Receive_IT(&huart1, rxbuff, sizeof(rxbuff)); //5 Bytes
//HAL_UART_Transmit_IT(&huart1, txbuff, sizeof(txbuff)); //这句话最好不要放在rx回调函数,会传全0
// for(int i = 0;i < 4;i++) 加上以后,发回的数据全是0
// {
// rxbuff[i] = 0;
// txbuff[i] = 0;
// }
//memset(rxbuff,0,4);加上以后,发回的数据全是0
//memset(txbuff,0,4);
}
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
HAL_UART_Transmit_IT(&huart1, rxbuff, 4);
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
注意:sizeof(rxbuff)这里是5,也就是接受五个字符,才会执行一次Rxcallback回调函数。
![]()
![]()
三、现象
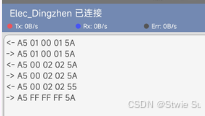
当上位机传输符合协议的数据帧时,相应LED翻转电平,同时发回与一样的数据帧给上位机。如果不符合协议,data与校验位发回FF。
附上透传的原始数据帧。最后一条不符合协议,而前面的符合协议。

















 5025
5025

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









